Kinect开发教程二:OpenNI读取深度图像与彩色图像并显示
来源:互联网 发布:淘宝卫浴 编辑:程序博客网 时间:2024/04/20 18:05
细心的朋友肯定已经发现Kinect上长了三只眼睛,其中一个是彩色摄像头,另外两个深度摄像头,一个负责发射红外光,一个负责接收,这样,我们便能通过Kinect得到一幅彩色图像和一幅深度图像。如果大家对Kniect眼睛的技术细节感兴趣,请点击这里。
小斤的第一个范例,便是通过OpenNI得到彩色和深度图像咯,代码不长,其中一部分参考了Heresky童鞋的文章《透過 OpneNI 合併 Kinect 深度以及彩色影像資料》,此外,小斤补充了OpenCV的显示部分,使范例更为直观。
#include <stdlib.h>#include <iostream>#include <string>//【1】#include <XnCppWrapper.h>#include "opencv/cv.h"#include "opencv/highgui.h"using namespace std;using namespace cv;void CheckOpenNIError( XnStatus result, string status ){ if( result != XN_STATUS_OK ) cerr << status << " Error: " << xnGetStatusString( result ) << endl;}int main( int argc, char** argv ){XnStatus result = XN_STATUS_OK; xn::DepthMetaData depthMD;xn::ImageMetaData imageMD;//OpenCVIplImage* imgDepth16u=cvCreateImage(cvSize(640,480),IPL_DEPTH_16U,1);IplImage* imgRGB8u=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,3);IplImage* depthShow=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,1);IplImage* imageShow=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,3);cvNamedWindow("depth",1);cvNamedWindow("image",1);char key=0;//【2】// context xn::Context context; result = context.Init(); CheckOpenNIError( result, "initialize context" ); // creategenerator xn::DepthGenerator depthGenerator; result = depthGenerator.Create( context ); CheckOpenNIError( result, "Create depth generator" ); xn::ImageGenerator imageGenerator;result = imageGenerator.Create( context ); CheckOpenNIError( result, "Create image generator" );//【3】//map mode XnMapOutputMode mapMode; mapMode.nXRes = 640; mapMode.nYRes = 480; mapMode.nFPS = 30; result = depthGenerator.SetMapOutputMode( mapMode ); result = imageGenerator.SetMapOutputMode( mapMode ); //【4】// correct view port depthGenerator.GetAlternativeViewPointCap().SetViewPoint( imageGenerator ); //【5】//read dataresult = context.StartGeneratingAll(); //【6】result = context.WaitNoneUpdateAll(); while( (key!=27) && !(result = context.WaitNoneUpdateAll( )) ) { //get meta datadepthGenerator.GetMetaData(depthMD); imageGenerator.GetMetaData(imageMD);//【7】//OpenCV outputmemcpy(imgDepth16u->imageData,depthMD.Data(),640*480*2);cvConvertScale(imgDepth16u,depthShow,255/4096.0,0);memcpy(imgRGB8u->imageData,imageMD.Data(),640*480*3);cvCvtColor(imgRGB8u,imageShow,CV_RGB2BGR);cvShowImage("depth", depthShow);cvShowImage("image",imageShow);key=cvWaitKey(20);}//destroycvDestroyWindow("depth");cvDestroyWindow("image");cvReleaseImage(&imgDepth16u);cvReleaseImage(&imgRGB8u);cvReleaseImage(&depthShow);cvReleaseImage(&imageShow);context.StopGeneratingAll();context.Shutdown();return 0;}
这边小斤由上到下解释一把:
【1】<XnCppWrapper.h>便是OpenNI的文件头了,使用OpenNI的话,目前只要include这个就行。
【2】DepthGenerator和ImageGenerator,小斤称之为图像生成器,前者负责深度图像,后者负责彩色图像。创建一个生成器非常简单,首先我们要初始化一个Context上下文,然后把Context作为Create函数的参数,便可以创建生成器了。
【3】XnMapOutputMode是用来设定生成器的参数的,这边小斤设定了分辨率为640*480(标准),30fps采样。
【4】depthGenerator.GetAlternativeViewPointCap().SetViewPoint( imageGenerator)这句话也许会让大家疑惑,它是用来调整视角的。为什么要调整呢?因为Kinect的三只眼长在不同的地方,所以画幅一致的深度摄像头和彩色摄像头,它们看出来的景物是有偏差的,这里OpenNI提供了函数进行对齐。这里,小斤把深度生成器的视角,设定为彩色生成器的视角。
【5】调用StartGeneratingAll()后,生成器们便开始上班了,如果要结束,就StopGeneratingAll()函数。
【6】尽管生成器们在工作了,但他们一直忙着各读各的,没有人协调,自己不会乖乖把最新的资料给我们。我们调用getMetaData()方法前,需要使用WaitAnyUpdateAll()、WaitOneUpdateAll()、WaitNoneUpdateAll()和WiatAndUpdateAll()中的一种。功能如其名,这边小斤使用的是WaitNoneUpdateAll()函数,它比较暴力,不管生成器有没有读到新数据,我这边先更新了再说。大家可以试试其它三个,看看效果。
【7】这边使用OpenNI获得图像MetaData数据后,小斤通过一系列函数,转换为OpenCV的IplImage图像类型,然后输出。主要参考了这篇文章。
对于深度MetaData,这边使用cvConvertScale转换尺度,成为灰度值[0,255]的灰度图。对于彩色MetaData,使用cvCvtColor转换色彩空间即可。按ESC键可以退出循环,结束程序。
最终效果如下:
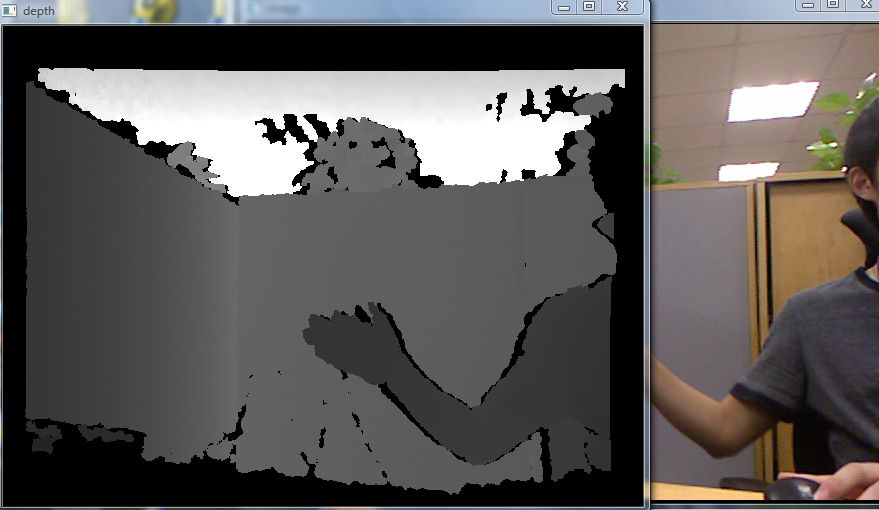
在灰度图中灰度值0显示为黑色,255为白色,所以,离Kinect近的地方(桌面)显示为黑色,中间为不同程度的灰色,远处(天花板)显示为白色。
----------------------------------
作者:小斤(陈忻)
本文属于原创文章,如需转载引用请注明原文作者和链接,谢谢。
- Kinect开发教程二:OpenNI读取深度图像与彩色图像并显示
- Kinect开发教程二:OpenNI读取深度图像与彩色图像并显示
- Kinect开发教程二:OpenNI读取深度图像与彩色图像并显示
- Heresy透過 OpneNI 合併 Kinect 深度以及彩色影像資料(Kinect开发教程二:OpenNI读取深度图像与彩色图像并显示)
- Heresy透過 OpneNI 讀取 Kinect 深度影像資料(Kinect开发教程二:OpenNI读取深度图像与彩色图像并显示)
- kinect,openni,opencv 获取并显示深度与彩色图像
- OpenNI结合OpenCV显示Kinect彩色、深度及融合图像
- ROS使用openni获取Kinect彩色图像和深度图像
- Kinect开发教程八:OpenNI2显示深度、彩色及融合图像
- Kinect开发教程八:OpenNI2显示深度、彩色及融合图像
- 如何使用Kinect显示彩色图像和深度图像。
- opencv2.3读取kinect深度信息和彩色图像
- kinect+openni获取kinect的颜色图像和深度图像
- 基于Kinect-OpenNI-OpenCV-OpenGL的环境三维重构 windows vs2008 深度彩色图像
- OpenCV--鼠标响应Kinect彩色图像显示深度信息
- kinect 开发入门——读取深度信息和显示深度信息图像
- kinect 深度彩色图像对齐的问题
- 在ubuntu14.04下openni+opencv+kinectV1的学习二:图像的读取与显示
- 领域驱动设计(Domain Driven Design)参考架构详解
- 一、C语言的产生和发展及特点
- 从MVC框架看MVC架构的设计
- AS3、AS4事件机制
- Timestamp和String的相互转换
- Kinect开发教程二:OpenNI读取深度图像与彩色图像并显示
- 用Tkinter写的聊天室的输入中文的问题
- 关于jvm 中vmthread的问题
- 关于Ray Operands
- 为什么我们程序员难晋升
- SAMBA服务器的配置和管理
- 行业与公司类型
- 《大话处理器》连载——微架构(13) 去数据相关和控制相关
- 质量管理经中的八个法则


