利用KINECT+OPENCV检测手势的演示程序
来源:互联网 发布:数控车床锥度编程实例 编辑:程序博客网 时间:2024/04/25 08:43
转自:http://blog.csdn.net/firefight/article/details/6304050
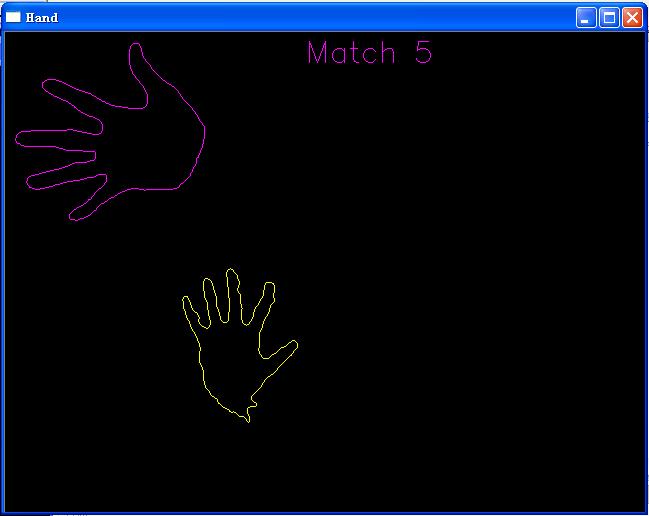
2011-4-10 增加结果图片,更新代码,将模板改为6个(0-5)
1,原理:读入KINECT深度数据,转换为二值图像,找到轮廓,与轮廓模板比较,找到HU矩阵最小的为匹配结果
2,基础:OPENNI, OPENCV2.2 以及http://blog.163.com/gz_ricky/blog/static/182049118201122311118325/
的例程基础上修改
3,结果:仅仅用于演示利用OPENCV+OPENNI编程,对结果精度,处理速度等没有优化,仅供参考
对0,1和5的比较比较准确
废话少说,一切都在代码中
- // KinectOpenCVTest.cpp : 定义控制台应用程序的入口点。
- //
- #include "stdafx.h"
- #include <stdlib.h>
- #include <iostream>
- #include <string>
- #include <XnCppWrapper.h>
- #include <opencv2/opencv.hpp>
- //#include "opencv/cv.h"
- //#include "opencv/highgui.h"
- using namespace std;
- using namespace cv;
- #define SAMPLE_XML_PATH "../../Data/SamplesConfig.xml"
- //全局模板轮廓
- vector<vector<Point>> g_TemplateContours;
- //模板个数
- int g_handTNum = 6;
- void CheckOpenNIError( XnStatus eResult, string sStatus )
- {
- if( eResult != XN_STATUS_OK )
- {
- cerr << sStatus << " Error: " << xnGetStatusString( eResult ) << endl;
- return;
- }
- }
- //载入模板的轮廓
- void init_hand_template()
- {
- //int handTNum = 10;
- string temp = "HandTemplate/";
- int i = 0;
- for(i=0; i<g_handTNum; i++)
- {
- stringstream ss;
- ss << i << ".bmp";
- string fileName = temp + ss.str();
- //读入灰度图像
- Mat src = imread(fileName, 0);
- if(!src.data)
- {
- printf("未找到文件: %s/n", fileName);
- continue;
- }
- vector<vector<Point>> contours;
- vector<Vec4i> hierarchy;
- findContours(src, contours, hierarchy, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE);
- //findContours(src, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_NONE);
- g_TemplateContours.push_back(contours[0]);
- }
- }
- //模板匹配手
- int hand_template_match(Mat& hand)
- {
- //int handTNum = 10;
- int minId = -1;
- double minHu = 1;
- double hu;
- int method = CV_CONTOURS_MATCH_I1;
- //match_num = 0;
- for(int i=0; i<g_handTNum; i++){
- Mat temp(g_TemplateContours.at(i));
- hu = matchShapes(temp, hand, method, 0);
- //找到hu矩最小的模板
- if(hu < minHu){
- minHu = hu;
- minId = i;
- }
- //printf("%f ", hu);
- }
- //显示匹配结果
- int Hmatch_value = 25;//模板匹配系数
- if(minHu<((double)Hmatch_value)/100)
- return minId;
- else
- return -1;
- }
- void findHand(Mat& src, Mat& dst)
- {
- vector<vector<Point>> contours;
- vector<Vec4i> hierarchy;
- //找到外部轮廓
- //findContours(src, contours, hierarchy, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE);
- findContours(src, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE); //CV_CHAIN_APPROX_NONE);
- //findContours(src, contours, CV_RETR_LIST, CV_CHAIN_APPROX_SIMPLE);
- Mat dst_r = Mat::zeros(src.rows, src.cols, CV_8UC3);
- dst_r.copyTo(dst);
- // iterate through all the top-level contours,
- // draw each connected component with its own random color
- int idx = 0;
- double maxArea = 0.0;
- int maxId = -1;
- for(unsigned int i = 0; i<contours.size(); i++)
- {
- Mat temp(contours.at(i));
- double area = fabs(contourArea(temp));
- if(area > maxArea)
- {
- maxId = i;
- maxArea = area;
- }
- }
- //for( ; idx >= 0; idx = hierarchy[idx][0] )
- //{
- // //Scalar color( rand()&255, rand()&255, rand()&255 );
- // //drawContours(dst, contours, idx, color, CV_FILLED, 8, hierarchy );
- // double area = contourArea(contours.at(idx));
- // if(area > maxArea)
- // {
- // maxId = idx;
- // maxArea = area;
- // }
- //}
- //显示最大轮廓外形,以及最佳匹配的模板ID
- if(contours.size() > 0)
- {
- Scalar color(0, 255, 255 );
- drawContours(dst, contours, maxId, color);
- Mat hand(contours.at(maxId));
- int value = hand_template_match(hand);
- if(value >= 0)
- {
- Scalar templateColor(255, 0, 255 );
- drawContours(dst, g_TemplateContours, value, templateColor);
- printf("Match %d /r/n", value);
- stringstream ss;
- ss << "Match " << value;
- string text = ss.str();
- putText(dst, text, Point(300, 30), FONT_HERSHEY_SIMPLEX, 1.0, templateColor);
- }
- }
- }
- int HandDetect()
- {
- init_hand_template();
- XnStatus eResult = XN_STATUS_OK;
- // 1. initial val
- xn::DepthMetaData m_DepthMD;
- xn::ImageMetaData m_ImageMD;
- // for opencv Mat
- Mat m_depth16u( 480,640,CV_16UC1);
- Mat m_rgb8u( 480,640,CV_8UC3);
- Mat m_DepthShow( 480,640,CV_8UC1);
- Mat m_ImageShow( 480,640,CV_8UC3);
- Mat m_DepthThreshShow( 480,640,CV_8UC1);
- Mat m_HandShow( 480,640,CV_8UC3);
- //cvNamedWindow("depth");
- //cvNamedWindow("image");
- //cvNamedWindow("depthThresh");
- char key=0;
- // 2. initial context
- xn::Context mContext;
- eResult = mContext.Init();
- //xn::EnumerationErrors errors;
- //eResult = mContext.InitFromXmlFile(SAMPLE_XML_PATH, &errors);
- CheckOpenNIError( eResult, "initialize context" );
- //Set mirror
- mContext.SetGlobalMirror(!mContext.GetGlobalMirror());
- // 3. create depth generator
- xn::DepthGenerator mDepthGenerator;
- eResult = mDepthGenerator.Create( mContext );
- CheckOpenNIError( eResult, "Create depth generator" );
- // 4. create image generator
- xn::ImageGenerator mImageGenerator;
- eResult = mImageGenerator.Create( mContext );
- CheckOpenNIError( eResult, "Create image generator" );
- // 5. set map mode
- XnMapOutputMode mapMode;
- mapMode.nXRes = 640;
- mapMode.nYRes = 480;
- mapMode.nFPS = 30;
- eResult = mDepthGenerator.SetMapOutputMode( mapMode );
- eResult = mImageGenerator.SetMapOutputMode( mapMode );
- //由于 Kinect 的深度摄像机和彩色摄像机是在不同的位置,而且镜头本身的参数也不完全相同,所以两个摄像机所取得的画面会有些微的差异
- //将深度摄像机的视角调整到RGB摄像机位置
- // 6. correct view port
- mDepthGenerator.GetAlternativeViewPointCap().SetViewPoint( mImageGenerator );
- // 7. start generate data
- eResult = mContext.StartGeneratingAll();
- // 8. read data
- eResult = mContext.WaitNoneUpdateAll();
- while( (key!=27) && !(eResult = mContext.WaitNoneUpdateAll( )) )
- {
- // 9a. get the depth map
- mDepthGenerator.GetMetaData(m_DepthMD);
- memcpy(m_depth16u.data,m_DepthMD.Data(), 640*480*2);
- // 9b. get the image map
- mImageGenerator.GetMetaData(m_ImageMD);
- memcpy(m_rgb8u.data,m_ImageMD.Data(),640*480*3);
- //将未知深度转为白色,便于在OPENCV中分析
- XnDepthPixel* pDepth = (XnDepthPixel*)m_depth16u.data;
- for (XnUInt y = 0; y < m_DepthMD.YRes(); ++y)
- {
- for (XnUInt x = 0; x < m_DepthMD.XRes(); ++x, ++pDepth)
- {
- if (*pDepth == 0)
- {
- *pDepth = 0xFFFF;
- }
- }
- }
- //由于OpenNI获得的深度图片是16位无符号整数,而OpenCV显示的是8位的,所以要作转换。
- //将距离转换为灰度值(0-2550mm 转换到 0-255),例如1000毫米转换为 1000×255/2550 = 100
- //m_depth16u.convertTo(m_DepthShow,CV_8U, 255/2096.0);
- m_depth16u.convertTo(m_DepthShow,CV_8U, 255/2550.0);
- //可以考虑根据数据缩减图像大小到有效范围
- //在此对灰度图像进行处理,平滑和去噪声
- //medianBlur(m_DepthShow, m_DepthThreshShow, 3);
- //m_DepthThreshShow.copyTo(m_DepthShow);
- //medianBlur(m_DepthThreshShow, m_DepthShow, 3);
- blur(m_DepthShow, m_DepthThreshShow, Size(3, 3));
- //m_DepthThreshShow.copyTo(m_DepthShow);
- blur(m_DepthThreshShow, m_DepthShow, Size(3, 3));
- Mat pyrTemp( 240,320,CV_8UC1);
- pyrDown(m_DepthShow, pyrTemp);
- pyrUp(pyrTemp, m_DepthShow);
- //dilate(m_DepthShow, m_DepthThreshShow, Mat(), Point(-1,-1), 3);
- //erode(m_DepthThreshShow, m_DepthShow, Mat(), Point(-1,-1), 3);
- //for(int i = 0; i < m_depth16u.rows; i++)
- // for(int j = 0; j < m_depth16u.cols; j++)
- // {
- // if(m_depth16u.at<unsigned short>(i,j) < 1)
- // m_depth16u.at<unsigned short>(i,j) == 0xFFFF;
- // //m_depth16u.at<double>(i,j)=1./(i+j+1);
- // }
- //RGB和BGR在内存对应的位置序列不同,所以也要转换。
- cvtColor(m_rgb8u,m_ImageShow,CV_RGB2BGR);
- //imshow("depth", m_DepthShow);
- //imshow("image", m_ImageShow);
- double thd_max = 0xFFFF;
- double thd_val = 100.0;
- //反转黑白图像,以便找到最大外部轮廓
- //threshold(m_DepthShow, m_DepthThreshShow, thd_val, thd_max, CV_THRESH_BINARY);
- threshold(m_DepthShow, m_DepthThreshShow, thd_val, thd_max, CV_THRESH_BINARY_INV);
- imshow("depthThresh", m_DepthThreshShow);
- findHand(m_DepthThreshShow, m_HandShow);
- imshow( "Hand", m_HandShow );
- key=cvWaitKey(20);
- }
- // 10. stop
- mContext.StopGeneratingAll();
- mContext.Shutdown();
- return 0;
- }
- int _tmain(int argc, _TCHAR* argv[])
- {
- HandDetect();
- }
0 0
- 利用KINECT+OPENCV检测手势的演示程序
- 利用KINECT+OPENCV检测手势的演示程序
- 利用OPENNI的用户数据生成器和OPENCV判断手势的演示
- 利用Kinect的手势操作来管理银行账户
- kinect 手势识别的原理?
- OpenCV演示程序 汇总
- 利用OpenCV的findContours作轮廓检测
- 利用opencv,dlib,python编写人脸检测程序
- 利用OpenCV检测肤色
- 关于Kinect手势识别的一点体会
- 基于C++的Kinect手势识别实现
- 【Unity】Kinect获取预制的手势信息
- kinect手势识别后,利用识别效果控制鼠标
- Kinect开发教程三:利用OpenNI进行手势识别
- Kinect开发教程三:利用OpenNI进行手势识别
- Kinect开发教程三:利用OpenNI进行手势识别
- Kinect开发教程三:利用OpenNI进行手势识别
- Kinect开发教程:利用OpenNI进行手势识别
- Android之事件处理
- 让你的软件界面更漂亮(一)
- django模板使用心得
- ArcGIS教程:ArcGIS中栅格数据重采样方法
- Linux 从源码编译安装 OpenSSL
- 利用KINECT+OPENCV检测手势的演示程序
- erhwerh
- 杨金山落马快问题多
- 10.1-10.31推荐文章汇总
- 第十二周项目一:阅读程序1
- 第十二周项目1-阅读程序4
- C#调用C接口字符参数编码的问题解决方法
- Linux睡眠唤醒机制--Kernel态
- 十二周项目一(3)


