Codeforces Round #409 D. Volatile Kite (几何)
来源:互联网 发布:初中学历学seo要多久 编辑:程序博客网 时间:2024/06/06 08:41
You are given a convex polygon P with n distinct vertices p1, p2, ..., pn. Vertex pi has coordinates (xi, yi) in the 2D plane. These vertices are listed in clockwise order.
You can choose a real number D and move each vertex of the polygon a distance of at most D from their original positions.
Find the maximum value of D such that no matter how you move the vertices, the polygon does not intersect itself and stays convex.
The first line has one integer n (4 ≤ n ≤ 1 000) — the number of vertices.
The next n lines contain the coordinates of the vertices. Line i contains two integers xi and yi ( - 109 ≤ xi, yi ≤ 109) — the coordinates of the i-th vertex. These points are guaranteed to be given in clockwise order, and will form a strictly convex polygon (in particular, no three consecutive points lie on the same straight line).
Print one real number D, which is the maximum real number such that no matter how you move the vertices, the polygon stays convex.
Your answer will be considered correct if its absolute or relative error does not exceed 10 - 6.
Namely, let's assume that your answer is a and the answer of the jury is b. The checker program will consider your answer correct if 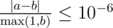 .
.
40 00 11 11 0
0.3535533906
65 010 012 -410 -85 -83 -4
1.0000000000
Here is a picture of the first sample
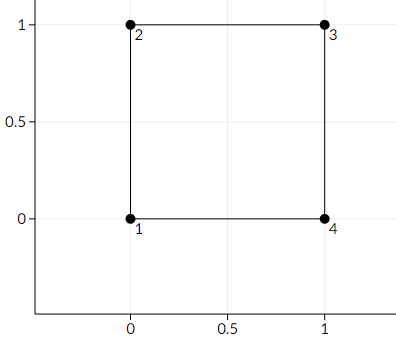
Here is an example of making the polygon non-convex.
This is not an optimal solution, since the maximum distance we moved one point is ≈ 0.4242640687, whereas we can make it non-convex by only moving each point a distance of at most ≈ 0.3535533906.
题意:给出一个凸多边形,要求求出一个最大的dist,使得所有的点可以任意移动距离最大为第dist的路程,依然为凸多边形。
计算几何、凸多边形、线段类
对于凸多边形,每相邻的三个点可以构成一个三角形ABC,答案为B到AC的距离的一半,
可以以每个点为圆心话圆,这里借用一下官方Tutorial里的图片☺☺

然后借助下常用的点类和线段类即可,以下用的是红书上的线段类
复杂度 O(n)
#include <iostream>#include <cstdio>#include <cmath>#include <iomanip>using namespace std;typedef long long LL;const int MAXN = 1e3 + 8;//error correctconst double EPS = 1e-8;inline int cmp(double x){ if(fabs(x) < EPS) return 0; if(x > 0) return 1; return -1;}//point classconst double pi = acos(-1.0);inline double sqr(double x){ return x * x;}struct point{ double x, y; point() {} point(double a, double b) : x(a), y(b) {} void input(){ cin >> x >> y; } friend point operator + (const point &a, const point &b){ return point(a.x + b.x, a.y + b.y); } friend point operator - (const point &a, const point &b){ return point(a.x - b.x, a.y - b.y); } friend bool operator == (const point &a, const point &b){ return (cmp(a.x - b.x) == 0) && (cmp(a.y - b.y) == 0); } friend point operator * (const point &a, const double &b){ return point(a.x * b, a.y * b); } friend point operator * (const double &a, const point &b){ return point(a * b.x, a * b.y); } friend point operator / (const point &a, const double &b){ return point(a.x / b, a.y / b); } double norm(){ return sqrt(sqr(x) + sqr(y)); }};double det(const point &a, const point &b){ return a.x * b.y - a.y * b.x;}//计算2个向量的叉积double dot(const point &a, const point &b){ return a.x * b.x + a.y * b.y;}//计算2个向量的点积double dist(const point &a, const point &b){ return (a - b).norm();}//计算2个点的距离point rotate_point(const point &p, double A){ double tx = p.x, ty = p.y; return point(tx * cos(A) - ty * sin(A), tx * sin(A) + ty * cos(A));}//向量op绕原点逆时针旋转A(弧度)// line classstruct line{ point a, b; line() {} line(point x, point y) : a(x), b(y) {}};inline line point_make_line(const point &a, const point &b){ return line(a, b);}//!!!!!!!!!!!!!!!!!!inline double dis_point_segment(const point &p, const point &s, const point &t){ if(cmp(dot(p-s, t-s)) < 0) return (p-s).norm(); if(cmp(dot(p-t, s-t)) < 0) return (p-t).norm(); return fabs(det(s-p, t-p) / dist(s, t));}//求p点到线段st的距离inline void PointProjLine(const point &p, const point &s, const point &t, point &cp){ double r = dot((t-s), (p-s)) / dot(t-s, t-s); cp = s + r*(t-s);}//求p点到线段st的垂足,保存在cp中inline bool PointOnSegment(const point &p, const point &s, const point &t){ return (cmp(det(p-s, t-s)) == 0) && (cmp(dot(p-s, p-t)) <= 0);}//判断p点是否在线段st上inline bool parallel(const line &a, const line &b){ return !cmp(det(a.a - a.b, b.a - b.b));}//判断a和b是否平行inline bool line_make_point(const line &a, const line &b, point &res){ if(parallel(a, b)) return false; double s1 = det(a.a-b.a, b.b-b.a); double s2 = det(a.b-b.a, b.b-b.a); res = (s1*a.b - s2*a.a) / (s1 - s2); return true;}//判断a和b是否相交,如果相交则返回true且交点保存在res中inline line move_d(const line &a, const double &len){ point d = a.b - a.a; d = d / d.norm(); d = rotate_point(d, pi/2); return line(a.a + d*len, a.b + d*len);}//将直线a沿法向量方向平移距离len得到的直线point val[MAXN];int n;inline int mod(int x){ return x - x / n * n;}int main(){ #ifdef LOCAL freopen("d.txt", "r", stdin); //freopen("d.out", "w", stdout); int T = 4; while(T--){ #endif // LOCAL ios::sync_with_stdio(false); cin.tie(0); int i; double ans = 2e9+8; cin >> n; for(i = 0; i < n; i++){ val[i].input(); } for(i = 0; i < n; i++){ ans = min(ans, dis_point_segment(val[mod(i+1)], val[i], val[mod(i+2)]) / 2); } cout << fixed << setprecision(10) << ans << endl; #ifdef LOCAL cout << endl; } #endif // LOCAL return 0;}- Codeforces Round #409 D. Volatile Kite (几何)
- Codeforces Round #409 D. Volatile Kite (几何)
- Codeforces Round #409 D. Volatile Kite (几何)
- Codeforces Round #409Div.2D. Volatile Kite(计算几何)
- Codeforces Round #409 (Div. 2) D. Volatile Kite 计算几何、凸多边形、线段类
- codeforces Volatile Kite(几何)
- Codeforces 801D Volatile Kite 几何
- Codeforces Round #409 (rated, Div. 2, based on VK Cup 2017 Round 2) D. Volatile Kite
- CodeForces 772B Volatile Kite
- codeforces Volatile Kite (向量的操作模板)
- Codeforces Round #346 (Div. 2)(D)计算几何
- Codeforces Round #445 Div1 D:Symmetric Projections (计算几何)
- VK Cup 2017 B. Volatile Kite (Div . 1)(凸多边形退化)(计算几何)
- Educational Codeforces Round 11 D 计算几何
- Codeforces Round #409 (rated, Div. 2, based on VK Cup 2017 Round 2) D (简单计算几何)
- Codeforces Round #340 (Div. 2) D. Polyline 计算几何,折线
- Codeforces Beta Round #13 D —— Triangles 计算几何
- Codeforces801D Volatile Kite
- Boolan* C++课程第六周笔记
- 如何去掉CSDN中图片水印
- 支付与分享
- bzoj 2179 FFT快速傅立叶(NTT)
- IDEA创建servlet时找不到 import javax.servlet...相关类包的问题
- Codeforces Round #409 D. Volatile Kite (几何)
- 排序算法概述
- Android中RelativeLayout部分属性及简单应用
- 编程刷题-双核CPU
- Android 学习路线
- C++中为什么构造函数不能为虚函数原因
- CSS3--边框图片
- Effective Objective-C 2.0 总结(一)
- 使用easyui-tree不同页面函数的注意事项


