并发AQS同步器
来源:互联网 发布:eclipse怎么编写java 编辑:程序博客网 时间:2024/06/06 00:47
一.AQS容器架构
AQS同步器拥有首节点(head)和尾节点(tail)。同步队列的基本结构如下: 
队列的基本操作有:
未获取到锁的线程加入同步队列(同步队列设置尾节点):
同步器AQS中包含两个节点类型的引用:一个指向头结点的引用(head),一个指向尾节点的引用(tail),当一个线程成功的获取到锁(同步状态),其他线程无法获取到锁,而是被构造成节点(包含当前线程,等待状态)加入到同步队列中等待获取到锁的线程释放锁。这个加入队列的过程,必须要保证线程安全。否则如果多个线程的环境下,可能造成添加到队列等待的节点顺序错误,或者数量不对。因此同步器提供了CAS原子的设置尾节点的方法(保证一个未获取到同步状态的线程加入到同步队列后,下一个未获取的线程才能够加入)。 如下图,设置尾节点: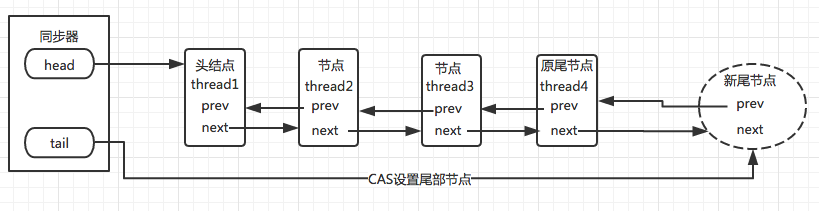
原头节点释放锁,唤醒后继节点(同步队列设置首节点):
同步队列遵循FIFO,头节点是获取锁(同步状态)成功的节点,头节点在释放同步状态的时候,会唤醒后继节点,而后继节点将会在获取锁(同步状态)成功时候将自己设置为头节点。设置头节点是由获取锁(同步状态)成功的线程来完成的,由于只有一个线程能够获取同步状态,则设置头节点的方法不需要CAS保证,只需要将头节点设置成为原首节点的后继节点 ,并断开原头结点的next引用。如下图,设置首节点: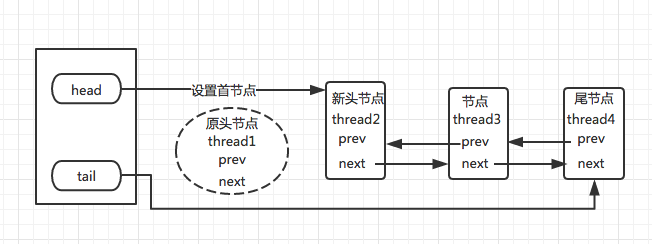
这个同步队列维护了一个volatile int state(代表共享资源)和一个FIFO线程等待队列(多线程争用资源被阻塞时会进入此队列)。这里volatile是核心关键词,具体volatile的语义,在此不述。state的访问方式有三种:
a. getState()
b. setState()
c. compareAndSetState()
AQS定义两种资源共享方式:Exclusive(独占,只有一个线程能执行,如ReentrantLock)和Share(共享,多个线程可同时执行,如Semaphore/CountDownLatch)。
不同的自定义同步器争用共享资源的方式也不同。自定义同步器在实现时只需要实现共享资源state的获取与释放方式即可,至于具体线程等待队列的维护(如获取资源失败入队/唤醒出队等),AQS已经在顶层实现好了。自定义同步器实现时主要实现以下几种方法:- isHeldExclusively():该线程是否正在独占资源。只有用到condition才需要去实现它。
- tryAcquire(int):独占方式。尝试获取资源,成功则返回true,失败则返回false。
- tryRelease(int):独占方式。尝试释放资源,成功则返回true,失败则返回false。
- tryAcquireShared(int):共享方式。尝试获取资源。负数表示失败;0表示成功,但没有剩余可用资源;正数表示成功,且有剩余资源。
- tryReleaseShared(int):共享方式。尝试释放资源,成功则返回true,失败则返回false。
二.AQS同步状态
AQS采用的是CLH队列,CLH队列是由一个一个结点构成的,前面提到结点中有一个状态位,这个状态位与线程状态密切相关,这个状态位(waitStatus)是一个32位的整型常量,它的取值如下:
1.static final int CANCELLED = 1; 2.static final int SIGNAL = -1; 3.static final int CONDITION = -2; 4.static final int PROPAGATE = -3; 下面解释一下每个值的含义
CANCELLED:因为超时或者中断,结点会被设置为取消状态,被取消状态的结点不应该去竞争锁,只能保持取消状态不变,不能转换为其他状态。处于这种状态的结点会被踢出队列,被GC回收;
SIGNAL:表示这个结点的继任结点被阻塞了,到时需要通知它;
CONDITION:表示这个结点在条件队列中,因为等待某个条件而被阻塞;
PROPAGATE:使用在共享模式头结点有可能牌处于这种状态,表示锁的下一次获取可以无条件传播;
0:None of the above,新结点会处于这种状态。
三.获取锁
AQS中比较重要的两个操作是获取和释放,以下是各种获取操作:
1.public final void acquire(int arg); 2.public final void acquireInterruptibly(int arg); 3.public final void acquireShared(int arg); 4.public final void acquireSharedInterruptibly(int arg); 5.protected boolean tryAcquire(int arg); 6.protected int tryAcquireShared(int arg); 7.public final boolean tryAcquireNanos(int arg, long nanosTimeout) throws InterruptedException; public final boolean tryAcquireSharedNanos(int arg, long nanosTimeout) throws InterruptedException; 获取操作的流程图如下: 
1、如果尝试获取锁成功整个获取操作就结束,否则转到2. 尝试获取锁是通过方法tryAcquire来实现的,AQS中并没有该方法的具体实现,只是简单地抛出一个不支持操作异常,在AQS简介中谈到tryAcquire有很多实现方法,这里不再细化,只需要知道如果获取锁成功该方法返回true即可;
2、如果获取锁失败,那么就创建一个代表当前线程的结点加入到等待队列的尾部,是通过addWaiter方法实现的,来看该方法的具体实现:
private Node addWaiter(Node mode) { Node node = new Node(Thread.currentThread(), mode); // Try the fast path of enq; backup to full enq on failure Node pred = tail; if (pred != null) { node.prev = pred; if (compareAndSetTail(pred, node)) { pred.next = node; return node; } } enq(node); return node; } 该方法创建了一个独占式结点,然后判断队列中是否有元素,如果有(pred!=null)就设置当前结点为队尾结点,返回;
如果没有元素(pred==null),表示队列为空,走的是入队操作
private Node enq(final Node node) { for (;;) { Node t = tail; if (t == null) { // Must initialize if (compareAndSetHead(new Node())) tail = head; } else { node.prev = t; if (compareAndSetTail(t, node)) { t.next = node; return t; } } } } enq方法采用的是变种CLH算法,先看头结点是否为空,如果为空就创建一个傀儡结点,头尾指针都指向这个傀儡结点,这一步只会在队列初始化时会执行;
如果头结点非空,就采用CAS操作将当前结点插入到头结点后面,如果在插入的时候尾结点有变化,就将尾结点向后移动直到移动到最后一个结点为止,然后再把当前结点插入到尾结点后面,尾指针指向当前结点,入队成功。
3、将新加入的结点放入队列之后,这个结点有两种状态,要么获取锁,要么就挂起,如果这个结点不是头结点,就看看这个结点是否应该挂起,如果应该挂起,就挂起当前结点,是否应该挂起是通过shouldParkAfterFailedAcquire方法来判断的
private static boolean shouldParkAfterFailedAcquire(Node pred, Node node) { int ws = pred.waitStatus; if (ws == Node.SIGNAL) /* * This node has already set status asking a release * to signal it, so it can safely park. */ return true; if (ws > 0) { /* * Predecessor was cancelled. Skip over predecessors and * indicate retry. */ do { node.prev = pred = pred.prev; } while (pred.waitStatus > 0); pred.next = node; } else { /* * waitStatus must be 0 or PROPAGATE. Indicate that we * need a signal, but don't park yet. Caller will need to * retry to make sure it cannot acquire before parking. */ compareAndSetWaitStatus(pred, ws, Node.SIGNAL); } return false; } 该方法首先检查前趋结点的waitStatus位,如果为SIGNAL,表示前趋结点会通知它,那么它可以放心大胆地挂起了;
如果前趋结点是一个被取消的结点怎么办呢?那么就向前遍历跳过被取消的结点,直到找到一个没有被取消的结点为止,将找到的这个结点作为它的前趋结点,将找到的这个结点的waitStatus位设置为SIGNAL,返回false表示线程不应该被挂起。
上面谈的不是头结点的情况决定是否应该挂起,是头结点的情况呢?
是头结点的情况,当前线程就调用tryAcquire尝试获取锁,如果获取成功就将头结点设置为当前结点,返回;如果获取失败就循环尝试获取锁,直到获取成功为止。整个acquire过程就分析完了。
我再用流程图总结一下:

四. 释放锁
释放操作有以下方法:
1.public final boolean release(int arg); 2.protected boolean tryRelease(int arg); 3.protected boolean tryReleaseShared(int arg); 下面看看release方法的实现过程
1、release过程比acquire要简单,首先调用tryRelease释放锁,如果释放失败,直接返回;
2、释放锁成功后需要唤醒继任结点,是通过方法unparkSuccessor实现的;

private void unparkSuccessor(Node node) { /* * If status is negative (i.e., possibly needing signal) try * to clear in anticipation of signalling. It is OK if this * fails or if status is changed by waiting thread. */ int ws = node.waitStatus; if (ws < 0) compareAndSetWaitStatus(node, ws, 0); /* * Thread to unpark is held in successor, which is normally * just the next node. But if cancelled or apparently null, * traverse backwards from tail to find the actual * non-cancelled successor. */ Node s = node.next; if (s == null || s.waitStatus > 0) { s = null; for (Node t = tail; t != null && t != node; t = t.prev) if (t.waitStatus <= 0) s = t; } if (s != null) LockSupport.unpark(s.thread); } 1、node参数传进来的是头结点,首先检查头结点的waitStatus位,如果为负,表示头结点还需要通知后继结点,这里不需要头结点去通知后继,因此将该该标志位清0.
2、然后查看头结点的下一个结点,如果下一个结点不为空且它的waitStatus<=0,表示后继结点没有被取消,是一个可以唤醒的结点,于是唤醒后继结点返回;如果后继结点为空或者被取消了怎么办?寻找下一个可唤醒的结点,然后唤醒它返回。
这里并没有从头向尾寻找,而是相反的方向寻找,为什么呢?
因为在CLH队列中的结点随时有可能被中断,被中断的结点的waitStatus设置为CANCEL,而且它会被踢出CLH队列,如何个踢出法,就是它的前趋结点的next并不会指向它,而是指向下一个非CANCEL的结点,而它自己的next指针指向它自己。一旦这种情况发生,如何从头向尾方向寻找继任结点会出现问题,因为一个CANCEL结点的next为自己,那么就找不到正确的继任接点。
有的人又会问了,CANCEL结点的next指针为什么要指向它自己,为什么不指向真正的next结点?为什么不为NULL?
第一个问题的答案是这种被CANCEL的结点最终会被GC回收,如果指向next结点,GC无法回收。
对于第二个问题的回答,JDK中有这么一句话: The next field of cancelled nodes is set to point to the node itself instead of null, to make life easier for isOnSyncQueue.大至意思是为了使isOnSyncQueue方法更新简单。isOnSyncQueue方法判断一个结点是否在同步队列,实现如下:
final boolean isOnSyncQueue(Node node) { if (node.waitStatus == Node.CONDITION || node.prev == null) return false; if (node.next != null) // If has successor, it must be on queue return true; /* * node.prev can be non-null, but not yet on queue because * the CAS to place it on queue can fail. So we have to * traverse from tail to make sure it actually made it. It * will always be near the tail in calls to this method, and * unless the CAS failed (which is unlikely), it will be * there, so we hardly ever traverse much. */ return findNodeFromTail(node); } 如果一个结点next不为空,那么它在同步队列中,如果CANCEL结点的后继为空那么CANCEL结点不在同步队列中,这与事实相矛盾。因此将CANCEL结点的后继指向它自己是合理的选择。
五. AQS在各同步器内的Sync与State实现
1、什么是state机制:
提供 volatile 变量 state; 用于同步线程之间的共享状态。通过 CAS 和 volatile 保证其原子性和可见性。对应源码里的定义:
/** * 同步状态 */ private volatile int state; /** *cas */ protected final boolean compareAndSetState(int expect, int update) { // See below for intrinsics setup to support this return unsafe.compareAndSwapInt(this, stateOffset, expect, update); } 2、不同实现类的Sync与State:
基于AQS构建的Synchronizer包括ReentrantLock,Semaphore,CountDownLatch, ReetrantRead WriteLock,FutureTask等,这些Synchronizer实际上最基本的东西就是原子状态的获取和释放,只是条件不一样而已。
a. ReentrantLock
需要记录当前线程获取原子状态的次数,如果次数为零,那么就说明这个线程放弃了锁(也有可能其他线程占据着锁从而需要等待),如果次数大于1,也就是获得了重进入的效果,而其他线程只能被park住,直到这个线程重进入锁次数变成0而释放原子状态。ReetranLock可以通过FairSync的tryAcquire实现:
state初始化为0,表示未锁定状态。A线程lock()时,会调用tryAcquire()独占该锁并将state+1。此后,其他线程再tryAcquire()时就会失败,直到A线程unlock()到state=0(即释放锁)为止,其它线程才有机会获取该锁。当然,释放锁之前,A线程自己是可以重复获取此锁的(state会累加),这就是可重入的概念。但要注意,获取多少次就要释放多么次,这样才能保证state是能回到零态的。
b. Semaphore
则是要记录当前还有多少次许可可以使用,到0,就需要等待,也就实现并发量的控制,Semaphore一开始设置许可数为1,实际上就是一把互斥锁。Semaphore可以用FairSync实现。
c. CountDownLatch
闭锁则要保持其状态,在这个状态到达终止态之前,所有线程都会被park住,闭锁可以设定初始值,这个值的含义就是这个闭锁需要被countDown()几次,因为每次CountDown是sync.releaseShared(1),而一开始初始值为10的话,那么这个闭锁需要被countDown()十次,才能够将这个初始值减到0,从而释放原子状态,让等待的所有线程通过。
d. FutureTask
需要记录任务的执行状态,当调用其实例的get方法时,内部类Sync会去调用AQS的acquireSharedInterruptibly()方法,而这个方法会反向调用Sync实现的tryAcquireShared()方法,即让具体实现类决定是否让当前线程继续还是park,而FutureTask的tryAcquireShared方法所做的唯一事情就是检查状态,如果是RUNNING状态那么让当前线程park。而跑任务的线程会在任务结束时调用FutureTask 实例的set方法(与等待线程持相同的实例),设定执行结果,并且通过unpark唤醒正在等待的线程,返回结果。
参考文章
Java多线程(七)之同步器基础:AQS框架深入分析
Java并发AQS之详解
- Java并发同步器AQS
- 并发AQS同步器
- java 并发编程-队列同步器AQS了解
- 并发基础_7_并发_锁_队列同步器(AQS)
- Java并发框架——AQS之如何使用AQS构建同步器
- 深入理解AQS同步器
- 多线程同步器AQS
- java并发编程(三)--java中的锁(Lock接口和队列同步器AQS)
- 队列同步器(AQS)详解
- 队列同步器(AQS)详解
- java并发包顶层AQS(抽象的队列式的同步器)分析,结合ReentrantLock分析(源码分析)
- 同步器基础:AQS框架深入分析
- JAVA AQS抽象队列同步器详解
- java.util.concurrent 之 队列同步器AQS
- java中的队列同步器AQS -- AbstractQueuedSynchronizer
- 并发编程5-同步器
- Java并发同步器--Semaphore
- Java并发同步器--CountDownLatch
- 将数组写入txt读出后数据出错
- poj 3461 kmp算法
- 代理模式
- SpringBoot(七):SpringBoot整合Swagger2
- 1057. 数零壹(20)
- 并发AQS同步器
- TCP/IP协议之IP协议
- POJ3159 最大差距(差分约束系统) (K)
- PAT b1031-b1035题解
- CentOS_6.5下安装tomcat-7.0.69
- 【C语言】操作符
- 并发基础_1_序
- 设计模式->行为型模式->中介者模式
- 古文观止卷七_諫太宗十思疏_魏徵


