关于寻找shape特征(feature)的方法总结
来源:互联网 发布:2011安全生产事故数据 编辑:程序博客网 时间:2024/05/16 16:00
计算机视觉中,目前有哪些成熟的匹配定位算法
这个链接涉及到模板匹配的实际问题, 高票答主提到的ESM, 结构特征ASM的, 我都是第一次看到. 即便是我之前在下面提到的ICP算法也没有实际去应用过,计算机视觉的道路任重而道远啊.
computer and machine vision
computer vision algorithms and applications,
加上对应opencv2 cookbook 涉及到的大部分算法
关于寻找shape特征(feature)的方法总结
二维物体形状识别方法比较
Compares two shapes.
- C++: double matchShapes(InputArray contour1, InputArray contour2, int method, double parameter)
- Python: cv2.matchShapes(contour1, contour2, method, parameter) → retval
- C: double cvMatchShapes(const void* object1, const void* object2, int method, double parameter=0 )
Parameters: - object1 – First contour or grayscale image.
- object2 – Second contour or grayscale image.
- method – Comparison method: CV_CONTOURS_MATCH_I1 , CV_CONTOURS_MATCH_I2 orCV_CONTOURS_MATCH_I3 (see the details below).
- parameter – Method-specific parameter (not supported now).
The function compares two shapes. All three implemented methods use the Hu invariants (see HuMoments() ) as follows (  denotes object1,:math:B denotes object2 ):
denotes object1,:math:B denotes object2 ):
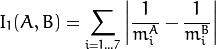
method=CV_CONTOURS_MATCH_I1
method=CV_CONTOURS_MATCH_I2

method=CV_CONTOURS_MATCH_I3
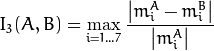
where
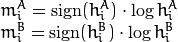
and  are the Hu moments of and
are the Hu moments of and  , respectively.
, respectively.
阅读全文
0 0
- 关于寻找shape特征(feature)的方法总结
- 关于寻找shape特征(feature)的方法总结
- 关于Feature layers特征图层
- 基于HALCON的Shape匹配方法总结
- 特征简约(feature reduce)方法比较
- 关于寻找字符串结尾的方法讨论
- 关于快速寻找素数的方法
- 机器学习的特征选择(feature selection)
- 总结 特征选择(feature selection)算法笔记
- 总结 特征选择(feature selection)算法笔记
- ArcEngine中Feature对象的Shape属性和ShapeCopy属性
- shape的使用总结
- shape的使用总结
- 特征选择方法总结
- 特征选择Feature Selection
- 特征选择(feature selection)
- 特征选择(Feature Selection)
- 特征处理(Feature Processing)
- java类与c++类的区别
- Linux命令grep -a:Binary file (standard input) matches
- spring mvc 拦截器打印详细的请求参数信息
- 洛谷 P1328 生活大爆炸版石头剪刀布
- Matlab 并行代码
- 关于寻找shape特征(feature)的方法总结
- 从oracle中导出数据到access中,以mdb格式导出文件
- git上传项目到github
- 五大常用算法之一:分治算法
- 洛谷 P1019 单词接龙
- java和C结构体通信
- java web的MVC开发模式
- BroadcastReceiver应用详解
- Grid / Custom command view detail informations


