Quaternion和AxisAngle的互相转换
来源:互联网 发布:windows 2012 mse 编辑:程序博客网 时间:2024/06/05 21:53
四元参数和轴角的互相, 即Quaternion和AxisAngle的互相转换.
1. 旋转轴和旋转角到四元参数
旋转轴(ax,ay,az), 旋转角angle 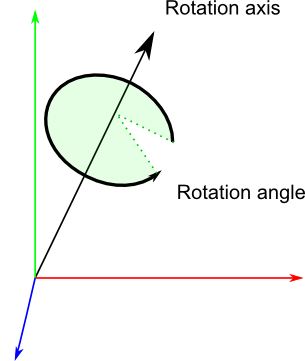
计算四元参数:
qx = ax * sin(angle/2)qy = ay * sin(angle/2)qz = az * sin(angle/2)qw = cos(angle/2)2. 四元参数到旋转轴和旋转角
angle = 2 * acos(qw)x = qx / sqrt(1-qw*qw)y = qy / sqrt(1-qw*qw)z = qz / sqrt(1-qw*qw)Reference: euclideanspace
阅读全文
0 0
- Quaternion和AxisAngle的互相转换
- List和string之间的互相转换
- date和string的互相转换
- CString和string的互相转换
- CString和string的互相转换
- Base64编码和图片的互相转换
- Base64编码和图片的互相转换
- CString和string的互相转换
- C# 字符串和byte的互相转换
- string和numeric之间的互相转换
- DataSet和xml的互相转换
- List和string之间的互相转换
- GB2312和 UTF8的互相转换函数
- unicode和utf8编码的互相转换
- CString和string的互相转换
- JS和Jquery的对象互相转换
- json字符串和对象的互相转换
- rgb和hsv的互相转换
- sizeof 关键字总结
- 3种web会话管理的方式
- Spark为何使用Netty通信框架替代Akka
- oracle database 12c Release 2-Managing Undo 翻译(第六章节)
- 使用SolrCloud出现org.apache.solr.common.SolrException: Collection not found: my_solr2
- Quaternion和AxisAngle的互相转换
- 小明学C++第三篇:编译原理
- Java语言for循环示例
- mac 下删除旧版本 mysql 并用 brew 重新安装
- Spring Boot 坑区 之 配置文件
- [NOIP2017模拟]德充符
- jQuery 取值、赋值的基本方法整理
- 【POJ】1995
- URL中%25E6%2588这样%25开头的字符是什么编码


