相机标定的原理
来源:互联网 发布:网站程序员培训中心 编辑:程序博客网 时间:2024/05/16 14:53
主要搜集了我觉得网上有用的资料,讲的很好,了解了相机标定的原理和数学方法
主要来源于这两篇文章
https://zhuanlan.zhihu.com/p/24651968
http://blog.csdn.net/pinbodexiaozhu/article/details/43373247
WHY:为什么要进行相机标定?
先说结论:建立相机成像几何模型并矫正透镜畸变。
建立相机成像几何模型:计算机视觉的首要任务就是要通过拍摄到的图像信息获取到物体在真实三维世界里相对应的信息,于是,建立物体从三维世界映射到相机成像平面这一过程中的几何模型就显得尤为重要,而这一过程最关键的部分就是要得到相机的内参和外参(后文有具体解释)。
矫正透镜畸变:我们最开始接触到的成像方面的知识应该是有关小孔成像的,但是由于这种成像方式只有小孔部分能透过光线就会导致物体的成像亮度很低,于是聪明的人类发明了透镜。虽然亮度问题解决了,但是新的问题又来了:由于透镜的制造工艺,会使成像产生多种形式的畸变,于是为了去除畸变(使成像后的图像与真实世界的景象保持一致),人们计算并利用畸变系数来矫正这种像差。(虽然理论上可以设计出不产生畸变的透镜,但其制造工艺相对于球面透镜会复杂很多,so相对于复杂且高成本的制造工艺,人们更喜欢用脑子来解决……)
【HOW:相机标定的原理】
前面已经说过,相机标定的目的之一是为了建立物体从三维世界到成像平面上各坐标点的对应关系,所以首先我们需要定义这样几个坐标系来为整个过程做好铺垫:
世界坐标系(world coordinate system):用户定义的三维世界的坐标系,为了描述目标物在真实世界里的位置而被引入。单位为m。
相机坐标系(camera coordinate system):在相机上建立的坐标系,为了从相机的角度描述物体位置而定义,作为沟通世界坐标系和图像/像素坐标系的中间一环。单位为m。
图像坐标系(image coordinate system):为了描述成像过程中物体从相机坐标系到图像坐标系的投影透射关系而引入,方便进一步得到像素坐标系下的坐标。 单位为m。
像素坐标系(pixel coordinate system):为了描述物体成像后的像点在数字图像上(相片)的坐标而引入,是我们真正从相机内读取到的信息所在的坐标系。单位为个(像素数目)。
关于这四个坐标系更详细的定义我就不说了,因为下面的图可以更好地表达这四个坐标系之间的关系:
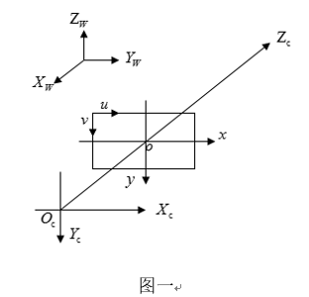
世界坐标系:Xw、Yw、Zw。相机坐标系: Xc、Yc、Zc。
图像坐标系:x、y。像素坐标系:u、v。
其中,相机坐标系的 轴与光轴重合,且垂直于图像坐标系平面并通过图像坐标系的原点,相机坐标系与图像坐标系之间的距离为焦距f(也即图像坐标系原点与焦点重合)。像素坐标系平面u-v和图像坐标系平面x-y重合,但像素坐标系原点位于图中左上角(之所以这么定义,目的是从存储信息的首地址开始读写)。
在这里我们先引入“棋盘”的概念:
棋盘是一块由黑白方块间隔组成的标定板,我们用它来作为相机标定的标定物(从真实世界映射到数字图像内的对象)。之所以我们用棋盘作为标定物是因为平面棋盘模式更容易处理(相对于复杂的三维物体),但与此同时,二维物体相对于三维物体会缺少一部分信息,于是我们会多次改变棋盘的方位来捕捉图像,以求获得更丰富的坐标信息。
下面将依次对刚体进行一系列变换,使之从世界坐标系进行仿射变换、投影透射,最终得到像素坐标系下的离散图像点,过程中会逐步引入各参数矩阵。
从世界坐标系到相机坐标系:
刚体从世界坐标系转换到相机坐标系的过程,可以通过旋转和平移来得到,我们将其变换矩阵由一个旋转矩阵和平移向量组合成的齐次坐标矩阵(为什么要引入齐次坐标可见附录)来表示:

其中,R为旋转矩阵,t为平移向量,因为假定在世界坐标系中物点所在平面过世界坐标系原点且与Zw轴垂直(也即棋盘平面与Xw-Yw平面重合,目的在于方便后续计算),所以zw=0,可直接转换成式1的形式。其中变换矩阵

即为前文提到的外参矩阵,之所称之为外参矩阵可以理解为只与相机外部参数有关,且外参矩阵随刚体位置的变化而变化。
从相机坐标系到理想图像坐标系(不考虑畸变):
这一过程进行了从三维坐标到二维坐标的转换,也即投影透视过程(用中心投影法将形体投射到投影面上,从而获得的一种较为接近视觉效果的单面投影图,也就是使我们人眼看到景物近大远小的一种成像方式)。我们还是拿针孔成像来说明(除了成像亮度低外,成像效果和透镜成像是一样的,但是光路更简单)。
成像过程如图二所示:针孔面(相机坐标系)在图像平面(图像坐标系)和物点平面(棋盘平面)之间,所成图像为倒立实像。

但是为了在数学上更方便描述,我们将相机坐标系和图像坐标系位置对调,变成图三所示的布置方式(没有实际的物理意义,只是方便计算):
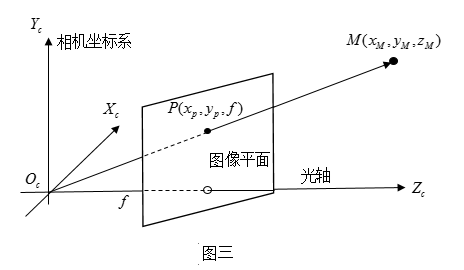
此时,假设相机坐标系中有一点M,则在理想图像坐标系下(无畸变)的成像点P的坐标为(可由相似三角形原则得出):
将上式化为齐次坐标表示形式为:

从理想图像坐标系到实际图像坐标系(考虑畸变):
透镜的畸变主要分为径向畸变和切向畸变(还有薄透镜畸变等等,但都没有径向和切向畸变影响显著,所以我们在这里只考虑径向和切向畸变)。
径向畸变是由于透镜形状的制造工艺导致。且越向透镜边缘移动径向畸变越严重。实际情况中我们常用r=0处的泰勒级数展开的前几项来近似描述径向畸变。矫正径向畸变前后的坐标关系为:

由此可知对于径向畸变,我们有3个畸变参数需要求解。
切向畸变是由于透镜和CMOS或者CCD的安装位置误差导致。切向畸变需要两个额外的畸变参数来描述,矫正前后的坐标关系为:

由此可知对于切向畸变,我们有2个畸变参数需要求解。
综上,我们一共需要5个畸变参数(k1、k2、k3、p1和p2 )来描述透镜畸变。
从实际图像坐标系到像素坐标系:
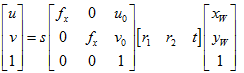
由于定义的像素坐标系原点与图像坐标系原点不重合,假设像素坐标系原点在图像坐标系下的坐标为(u0,v0),每个像素点在图像坐标系x轴、y轴方向的尺寸为:dx、dy,且像点在实际图像坐标系下的坐标为(xc,yc),于是可得到像点在像素坐标系下的坐标为:

化为齐次坐标表示形式可得:

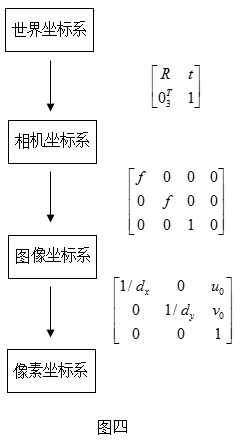
若暂不考虑透镜畸变,则将式2与式5的转换矩阵相乘即为内参矩阵M:

之所以称之为内参矩阵可以理解为矩阵内各值只与相机内部参数有关,且不随物体位置变化而变化。
最后用一幅图来总结从世界坐标系到像素坐标系(不考虑畸变)的转换关系:
【WHAT:内外参具体求解方法】
现在我们已经知道要想对相机进行标定,就需要求解出相机的内外参矩阵以及畸变系数,那么在数学上具体应该怎样求解呢?
假设我们提供K个棋盘图像,每个棋盘有N个角点,于是我们拥有2KN个约束方程。与此同时,忽略畸变的情况下,我们就需要求解4个内参和6K个外参(内参只于相机内部参数有关,外参却随目标点位置变化而变化),也就是说,只有当2KN>=4+6K的时候,也即K(N-3)>=2时,才能求出内外参矩阵。同时,无论在一张棋盘上检测到多少角点,由于棋盘上角点的规则布置使得真正能利用上的角点只有4个(在四个方向上可延展成不同的矩形),于是有当N=4时,K(4-3)>=2,即K>=2,也就是说,我们至少需要两张棋盘在不同方位的图像才能求解出无畸变条件下的内参和外参。
实际上我们往往会在一张棋盘上布置更多的角点,因为这样就可以通过最小二乘法求得最优解了,同样地,我们会需要至少10张以上的棋盘图像,目的是考虑数值稳定性和提高信噪比,得到更高质量的结果。
与此同时,我们在这里引入单应性的概念。在计算机视觉中的单应性被定义为从一个平面到另一个平面的投影映射关系,前面我们已经得到了像素坐标系和世界坐标系下的坐标映射关系:
因此,我们定义相机标定的单应性矩阵(从物体平面到成像平面)为:

这里引入的s为任意尺度的比例系数。单应性矩阵描述了物体在世界坐标系和像素坐标系之间的相对位置关系(包含了内参和外参)。接下来我们继续推导内外参数和畸变系数的具体求解方法。
首先不考虑透镜畸变情况下,求解内参和外参:
我们在上面的推导已经知道了单应性矩阵
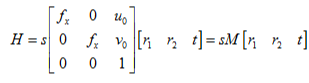
先将H化为H=[h1 h2 h3],再分解方程可得:
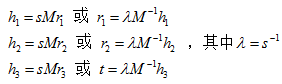
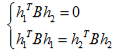
因为旋转向量在构造中是相互正交的,即r1和r2相互正交,由此我们就可以利用“正交”的两个含义,得出每个单应性矩阵(也即每个棋盘方位图像)提供的两个约束条件:
旋转向量点积为0(两垂直平面上的旋转向量互相垂直):

替换和并化简可得:

旋转向量长度相等(旋转不改变尺度):

替换掉r1和r2可得:

设

则可将两个约束条件转化为:
由上式可知,两约束中的单项式均可写为
的形式,同时易知B为对称矩阵,真正有用的元素只有6个(主对角线任意一侧的6个元素)。于是可展开为如下形式:
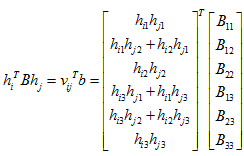
由此,两约束条件可等价为:
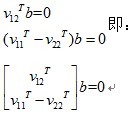
前面的讨论我们已经知道,棋盘图像数目满足就可求出内外参数,此时b有解,于是由内参数B的封闭解和b的对应关系即可求解出内参数矩阵中的各个元素(具体形式这里不给出)。得到内参数后,可继续求得外参数:

其中又由旋转矩阵性质有

则可得

进一步考虑透镜畸变情况,求解畸变系数:
根据式3和式4我们可以得到矫正畸变后的坐标和矫正前的坐标关系为:

有了上式的对应关系,又已知相应的内外参数,再利用大量给定的坐标数据即可进一步求得畸变系数(这里就可以交给计算机来解决了)。
---------------------------------------------------------------------------------------------------------------------------------------
---------------------------------------------------------------------------------------------------------------------------------------
这里再进一步解释下如何求单应性矩阵和
1、标定平面到图像平面的单应性
因为张氏标定是一种基于平面棋盘格的标定,所以想要搞懂张氏标定,首先应该从两个平面的单应性(homography)映射开始着手。
单应性(homography):在计算机视觉中被定义为一个平面到另一个平面的投影映射。首先看一下,图像平面与标定物棋盘格平面的单应性。
由上两篇博文中讲到的摄像机模型,肯容易得到:

其中m的齐次坐标表示图像平面的像素坐标(u,v,1),M的齐次坐标表示世界坐标系的坐标点(X,Y,Z,1)。A[R t]即是上面一篇博客推出的P。R表示旋转矩阵、t表示平移矩阵、S表示尺度因子。A表示摄像机的内参数,具体表达式如下:

α=f/dx,β=f/dy,因为像素不是规规矩矩的正方形,γ代表像素点在x,y方向上尺度的偏差。
这里还有一个“梗儿”,就是S。它只是为了方便运算,对于齐次坐标,尺度因子不会改变坐标值的。
因为标定物是平面,所以我们可以把世界坐标系构造在Z=0的平面上。然后进行单应性计算。令Z=0可以将上式转换为如下形式:

既然,此变化属于单应性变化。那么我们可以给A[r1 r2 t]一个名字:单应性矩阵。并记H= A[r1 r2 t]。
那么现在就有:

大家可以分析一下,H是一个三3*3的矩阵,并且有一个元素是作为齐次坐标。因此,H有8个未知量待解。
(x,y)作为标定物的坐标,可以由设计者人为控制,是已知量。(u,v)是像素坐标,我们可以直接通过摄像机获得。对于一组对应的(x,y)-à(u,v)我们可以获得两组方程。
现在有8个未知量需要求解,所以我们至少需要八个方程。所以需要四个对应点。四点即可算出,图像平面到世界平面的单应性矩阵H。
这也是张氏标定采用四个角点的棋盘格作为标定物的一个原因。
在这里,我们可以将单应性矩阵写成三个列向量的形式,即:

2、利用约束条件求解内参矩阵A
从上面可知,应用4个点我们可以获得单应性矩阵H。但是,H是内参阵和外参阵的合体。我们想要最终分别获得内参和外参。所以需要想个办法,先把内参求出来。然后外参也就随之解出了。我们可以仔细的“观摩”一下下面的式子。

从中可以得出下面两个约束条件,这两个约束条件都是围绕着旋转向量来的。
1、r1,r2正交 得:r1r2=0。这个很容易理解,因为r1,r2分别是绕x,y轴旋转的。应用高中立体几何中的两垂直平面上(两个旋转向量分别位于y-z和x-z平面)直线的垂直关系即可轻松推出。
2、旋转向量的模为1,即|r1|=|r2|=1。这个也很容易理解,因为旋转不改变尺度嘛。如果不信可以回到上一篇博客,找到个方向的旋转矩阵化行列式算一下。
通过上面的式子可以将r1,r2代换为h1,h2与A的组合进行表达。即 r1=h1A-1,r2=h2A-1.根据两约束条件,可以得到下面两个式子:

大家从上面两个式子是不是看出一点端倪了。式子中,h1,h2是通过单应性求解出来的那么未知量就仅仅剩下,内参矩阵A了。内参阵A包含5个参数:α,β,u0,v0,γ。那么如果我们想完全解出这五个未知量,则需要3个单应性矩阵。3个单应性矩阵在2个约束下可以产生6个方程。这样可以解出全部的五个内参了。大家想一下,我们怎样才能获得三个不同的单应性矩阵呢?答案就是,用三幅标定物平面的照片。我们可以通过改变摄像机与标定板间的相对位置来获得三张不同的照片。(当然也可以用两张照片,但这样的话就要舍弃掉一个内参了γ=0)
- 相机标定的原理
- 相机标定原理
- 相机标定原理
- 相机标定模型原理
- 相机标定原理
- 相机标定原理
- 相机标定之(2)相机模型中的四个坐标系以及相机标定的原理总结
- 相机标定简介与MatLab相机标定工具箱的使用(未涉及原理公式推导)
- 相机标定(2)---摄像机标定原理
- 相机标定(2)---摄像机标定原理
- 单目相机标定原理
- 单目相机标定原理
- 单目相机标定原理
- 相机标定与三维重建原理
- 单目相机标定原理
- 单目相机标定原理
- 相机标定原理(1)
- 相机标定原理 (2)
- 重载与重写
- Java中的Comparable和Comparator
- java之program arguments与VM arguments
- BZOJ1106: [POI2007]立方体大作战tet
- 用Python学《微积分B》(常数项级数)
- 相机标定的原理
- Scrapy用Twisted异步操作Mysql
- 使用UI框架和不使用UI框架情况分析
- 详解JavaWeb中的文件上传与下载
- 源码剖析Linux epoll实现机制及Linux上惊群
- Android 通用流行框架大全
- 【设计】工厂模式--C++源代码(VS2015)
- 风云论坛
- 错误: CXX0030:无法计算表达式的值(VS2010)


