模拟远程温度监控系统(包含程序)
来源:互联网 发布:数据库中的索引是什么 编辑:程序博客网 时间:2024/04/30 13:16
在模拟远程温度监控的时候,用到了DS18B20温度传感器,在远程的通信方面用了433M无线模块,以及USB转串口来连接上位,上位机中数据的读取用了Python脚本。
DS18B20传感器的基本信息
DS18B20 单线数字温度传感器,即“一线器件”,其具有独特的优点:( 1 )采用单总线的接口方式 与微处理器连接时仅需要一条口线即可实现微处理器与 DS18B20 的双向通讯。单总线具有经济性好,抗干扰能力强,适合于恶劣环境的现场温度测量,使用方便等优点,使用户可轻松地组建传感器网络,为测量系统的构建引入全新概念。
( 2 )测量温度范围宽,测量精度高 DS18B20 的测量范围为 -55 ℃ ~+ 125 ℃ ; 在 -10~+ 85°C范围内,精度为 ± 0.5°C 。
( 3 )在使用中不需要任何外围元件。
( 4 )持多点组网功能 多个 DS18B20 可以并联在惟一的单线上,实现多点测温。
( 5 )供电方式灵活 DS18B20 可以通过内部寄生电路从数据线上获取电源。因此,当数据线上的时序满足一定的要求时,可以不接外部电源,从而使系统结构更趋简单,可靠性更高。
( 6 )测量参数可配置 DS18B20 的测量分辨率可通过程序设定 9~12 位。
( 7 ) 负压特性电源极性接反时,温度计不会因发热而烧毁,但不能正常工作。
( 8 )掉电保护功能 DS18B20 内部含有 EEPROM ,在系统掉电以后,它仍可保存分辨率及报警温度的设定值。
DS18B20 具有体积更小、适用电压更宽、更经济、可选更小的封装方式,更宽的电压适用范围,适合于构建自己的经济的测温系统,因此也就被设计者们所青睐。
DS18B20内部结构
主要由4部分组成:64 位ROM、温度传感器、非挥发的温度报警触发器TH和TL、配置寄存器。ROM中的64位序列号是出厂前被光刻好的,它可以看作是该DS18B20的地址序列码,每个DS18B20的64位序列号均不相同。64位ROM的排的循环冗余校验码(CRC=X^8+X^5+X^4+1)。 ROM的作用是使每一个DS18B20都各不相同,这样就可以实现一根总线上挂接多个DS18B20的目的。

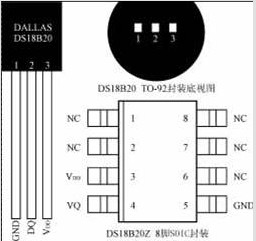
DS18B20管脚排列:
1. GND为电源地;
2. DQ为数字信号输入/输出端;
3. VDD为外接供电电源输入端(在寄生电源接线方式时接地)
433M 模块
在连接单片机的一端,由于m0 m1是不能悬空的,所以就让这两个引脚接地即可,AUX一般情况下不会使用,悬空即可,RXD接收引脚接单片机的T(发送),TXD接单片机的R(接收),供电使用5V供电即可;另一端要连接USB转串口模块来连接上位机,连接的方法与433M连接单片机的方法基本类似,然后单片机写入代码就能实现通信。
这里有一个串口调试助手,可以用来调试。
Python脚本
直接上代码吧
import serialimport systry: ser = serial.Serial('COM4', 9600)except Exception, e: print 'open serial failed.' exit(1)print 'The temprature is'while True: # echo s = ser.read() if(s!='#'): ser.write(s) # write to stdout and flush it sys.stdout.write(s) sys.stdout.flush()#include <reg51.h>#include <uart.h>#define uchar unsigned charcode unsigned char seg7code[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0xff}; //?????????????code unsigned char seg7codeB[]={0x40,0x79,0x24,0x30,0x19,0x12,0x02,0x78,0x00,0x10,0xff}; //????????????int count = 0;sbit DQ=P3^6; //??????????????? unsigned char tempL=0; //?????unsigned char tempH=0; unsigned int sdata;//???????????unsigned char xiaoshu1;//?????unsigned char xiaoshu2;//?????unsigned char xiaoshu;//????bit fg=1; //??????sbit key = P3^2;void delay(unsigned char i){for(i;i>0;i--);}void delay1(uchar i){uchar j,k; for(j=i;j>0;j--)for(k=125;k>0;k--);}void Init_DS18B20(void) {unsigned char x=0;DQ=1; //DQ??? delay(8); //???DQ=0; //?????? delay(80); //??(>480us) DQ=1; //????? delay(5); //??(15~60us) x=DQ; //?X?????????????,18B20????X=0,??X=1 delay(20); }//?????ReadOneChar(void) //?????????????1us??,??????????,???????{unsigned char i=0; //?????????????60us,??????????1us?????????unsigned char dat=0; for (i=8;i>0;i--) //?????8? {DQ=1; delay(1); DQ=0;dat>>=1; DQ=1; if(DQ) dat|=0x80; delay(4);} return(dat);}//?????void WriteOneChar(unsigned char dat) { unsigned char i=0; //????????????,????????15us??????????????,for(i=8;i>0;i--) //?15~60us??????????,????????1,??0??? {DQ=0; //?????????????1us?????????? DQ=dat&0x01; delay(5); DQ=1; dat>>=1;} delay(4);}//????(???tempL;???tempH;)void ReadTemperature(void) { Init_DS18B20(); //???WriteOneChar(0xcc); //?????????WriteOneChar(0x44); //??????delay(125); //????????,?? Init_DS18B20(); //???WriteOneChar(0xcc); //????????? WriteOneChar(0xbe); //??????(???????????????) tempL=ReadOneChar(); //???????LSBtempH=ReadOneChar(); //???????MSBif(tempH>0x7f) //????1?????{tempL=~tempL;//????,????tempH=~tempH+1; fg=0; //???????fg=0}sdata = tempL/16+tempH*16; //????xiaoshu1 = (tempL&0x0f)*10/16; //?????xiaoshu2 = (tempL&0x0f)*100/16%10;//?????xiaoshu=xiaoshu1*10+xiaoshu2; //????}//????void Led(unsigned int date){ if(fg==1){P2=0xef; //P1.0=0,?????P0=seg7code[date/10]; //???,??,??delay1(5);P0=0xff; //??//sendmsg(date/10+'0');P2=0xdf; //P1.1=0,?????,???P0=seg7codeB[date%10];delay1(5);P0=0xff; //??//sendmsg(date%10+'0');//sendmsg('.');P2=0xbf; //P1.3=0,?????,??????P0=seg7code[xiaoshu1];delay1(5);P0=0xff; //??//sendmsg(xiaoshu1+'0');P2=0x7f; //P1.3=0,?????,??????P0=seg7code[xiaoshu2];delay1(5);P0=0xff; //??//sendmsg(xiaoshu2+'0');}if(fg==0) //??????????{P2=0xfe; //P1.0=0,?????P0=seg7code[11]; //????delay1(5);P0=0xff; //??P2=0xfd; //P1.1=0,?????,???P0=seg7code[date/10];delay1(5);P0=0xff; //??P2=0xfb; //P1.3=0,?????,???P0=seg7codeB[date%10];delay1(5);P0=0xff; //??P2=0xf7; //P1.3=0,?????,??????P0=seg7code[xiaoshu1];delay1(5);P0=0xff; //??}}void send(int date){ sendmsg(date/10+'0'); sendmsg(date%10+'0'); //sendmsg('.'); //sendmsg(xiaoshu1+'0'); //sendmsg(xiaoshu2+'0'); //count++; sendmsg('C'); sendmsg(' ');}/*int keyflag(int a){int cc = 20;if(a == 0){while(cc--);if(a == 0){return 1;}else{return 0;}while(a == 0);}} */void delay_ms(unsigned int xms) // xms??????????{ unsigned int x,y; for(x=xms;x>0;x--) for(y=110;y>0;y--);}void main(){ initcom();//init_time();while(1){delay_ms(3000);ReadTemperature();count++;Led(sdata);//count = 0;if(count>=2) send(sdata);}}
头文件uart.h
#ifndef __COM_H__#define __COM_H__#define uchar unsigned char#define uint unsigned int#define XTAL 11059200 // CUP 晶振频率#define baudrate 9600 // 通信波特率void sendmsg(uchar ps){SBUF = ps; // 要发送的字符放入缓冲区while(TI == 0); // 一直等等,直到发送完数据为止TI = 0;}uchar rcvmsg(void) //调用此函数前,要先调用RI,查看是否收到数据,确定已收到的话,再调用此函数{RI=0; //要先将RI=0再返回,否则,返回后,RI=0这句就不执行了。return SBUF;}void initcom(){TMOD = 0x20; // 定时器1工作于8位自动重载模式, 用于产生波特率TH1=(unsigned char)(256 - (XTAL / (32L * 12L * baudrate)));TL1=(unsigned char)(256 - (XTAL / (32L * 12L * baudrate))); // 定时器1赋初值SM0 = 0; //串口工作方式控制SM1 = 1; //串口工作方式控制 //这两个共同控制了串口工作方式为 0;REN = 1; //串口接收允许PCON = 0x00;TR1 = 1; //允许串口接收ES = 0; //关闭串口中断}#endif阅读全文
0 0
- 模拟远程温度监控系统(包含程序)
- 温度监控系统
- 基于51单片机-温度监控系统
- 如何在Linux下监控系统温度
- 如何在Linux下监控系统温度
- 使用tinymini210开发远程的温度监控系统,实现C#和安卓客户端显示数据和控制
- 基于ZigBee的远程温度监测系统.
- DIY远程监控室内温度设备(tiny6410+ds18b20+yeelink+curl)
- 电子小制作:一个远程温度湿度监控方案
- DIY远程监控室内温度设备(tiny6410+ds18b20+yeelink+curl)
- 嵌入式物联网应用开发-远程温度监控
- 基于Qt的车载GPS监控系统(5)温度设置
- 远程监控程序的思路
- 局域网电脑远程监控程序
- 远程监控程序的实现
- 远程监控程序的实现
- VisualVM 远程监控jmx程序
- 远程实时监控系统DIY
- 【SSH】Spring学习(一)
- Android 时间倒计时
- java String类原理浅析
- python 内部使用unicode编码
- CentOS 7 下 修改Mysql 5.7datadir的位置,无法启动的问题解决
- 模拟远程温度监控系统(包含程序)
- C#学习总结(1)——与java的几个区别
- 数据结构实验5(从文件中读取数据)
- C语言中位运算异或“∧”的作用
- mt6750 battery_common.c阅读笔记1
- 300. Longest Increasing Subsequence
- LoRa关键参数 1、扩频因子(SF) 2、编码率(CR) 3、信号带宽(BW) 4、LoRa信号带宽BW、符号速率Rs和数据速率DR的关系 5、
- Linux修改文件夹权限命令chmod(转载)
- 高通(Qualcomm)LK源码深度分析


