PCL入门<四>根据向量做点云旋转
来源:互联网 发布:ppt是什么意思网络用语 编辑:程序博客网 时间:2024/05/15 22:11
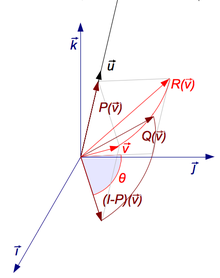
如果已知旋转前某个向量n1(x1,y1,z1)和旋转后的向量n2(x2,y2,z2)实际上已知了三个点,(0,0,0) (x1,y1,z1) (x2,y2,z2) 那么可以求出他们构成的平面的法向量,也就是同时垂直于n1和n2的这个向量,并且经过n1和n2的交点,也就是原点。这个向量就是他们的旋转轴。
那么已知三点怎么求平面的法向量呢,我们可以代入公式

其中x3,y3,z3我们设为原点,那么就是0,0,0.
void MatrixRotation::calculate_axis(){ float x1,x2,y1,y2,z1,z2; x1=normal_start_.normal_x,x2=normal_end_.normal_x; y1=normal_start_.normal_y,y2=normal_end_.normal_y; z1=normal_start_.normal_z,z2=normal_end_.normal_z; float x3,y3,z3; x3=y3=z3=0; axis_.normal_x=(y2-y1)*(z3-z1)-(y3-y1)*(z2-z1); axis_.normal_y=(z2-z1)*(x3-x1)-(z3-z1)*(x2-x1); axis_.normal_z=(x2-x1)*(y3-y1)-(x3-x1)*(y2-y1); //normalize float square_sum=axis_.normal_x*axis_.normal_x+ axis_.normal_y*axis_.normal_y+ axis_.normal_z*axis_.normal_z; square_sum=sqrt(square_sum); axis_.normal_x/=square_sum; axis_.normal_y/=square_sum; axis_.normal_z/=square_sum;}求出了法向量之后带入罗德里格斯旋转公式,求出旋转矩阵,

void MatrixRotation::matrix_tansform(pcl::PointCloud<PointT>::Ptr cloud){ Eigen::Matrix4f transform = Eigen::Matrix4f::Identity(); float x,y,z; x=axis_.normal_x;y=axis_.normal_y;z=axis_.normal_z; transform (0,0)=cos(theta_)+(1-cos(theta_))*x*x; transform (0,1)=(1-cos(theta_))*x*y-sin(theta_)*z; transform (0,2)=(1-cos(theta_))*x*z+sin(theta_)*y; transform (1,0)=(1-cos(theta_))*x*y+sin(theta_)*z; transform (1,1)=cos(theta_)+(1-cos(theta_))*y*y; transform (1,2)=(1-cos(theta_))*y*z-sin(theta_)*x; transform (2,0)=(1-cos(theta_))*x*z-sin(theta_)*y; transform (2,1)=(1-cos(theta_))*y*z+sin(theta_)*x; transform (2,2)=cos(theta_)+(1-cos(theta_))*z*z; pcl::transformPointCloud (*cloud, *cloud, transform);}其中,theta是需要旋转的角度,这个公式很简单,搜索求向量夹角就可以了,我这里不再赘述,直接使用了pcl的方法求的,最后使用pcl的旋转,实际上就是现有矩阵乘以旋转矩阵。这样就能得到旋转后的图像了。
完整代码我会上传到github上,敬请期待。。。
阅读全文
0 0
- PCL入门<四>根据向量做点云旋转
- PCL入门
- PCL入门
- 旋转向量
- 向量旋转
- 向量旋转
- 向量旋转
- 旋转向量
- 支持向量机SVM入门(四)
- 旋转向量-旋转矩阵
- PCL编程-法向量计算
- PCL编程-法向量计算
- PCL入门文档
- PCL入门Step byStep
- PCL入门Step byStep
- 三维空间中的旋转--旋转向量
- 旋转交换或向量旋转
- 三维空间中的旋转--旋转向量
- Eclipse-不显示某些文件夹
- 服务器宕机的快速解决方法
- 生成对抗网络Generative Adversarial Nets(译)
- Unity中从鼠标位置发射射线
- form标签中的target属性学习
- PCL入门<四>根据向量做点云旋转
- Spring事务的传播特性以及事务的隔离级别
- 因Kubernetes漏洞导致银行应用瘫痪1小时,事件细节回顾和分析
- 给定n个非负整数a1,a2,...,an, 找到两条线,它们与x轴一起形成的容器面积最大
- 基于NodeJs Gulp配置案例
- Eclipse的常用快捷键
- [干货来袭]DevExpress ASP.NET示例资源最全分享!(二)
- fsm(有限状态机)入门笔记
- 第6章 copssh


