webots自学笔记(八)麦克纳母轮移动机器人平台,可控制摄像头视角
来源:互联网 发布:木地板性价比 知乎 编辑:程序博客网 时间:2024/05/16 10:13
觉得基础的东西说的差不多了,之后就分享一些好玩的仿真例子了。如果有软件的问题可以私聊我,我也是很愿意交个朋友啥的,但是我能力也有限。
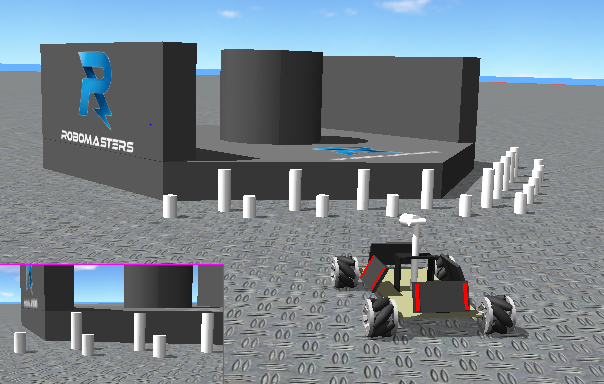
这次做了一个麦克纳母轮的移动平台,robomaster比赛里面常用到的种小车,由于本科学校有点渣,比赛玩不起,就玩玩仿真咯。轮子是从KUKA机器人的一个仿真例子中拆下来的,建一个麦轮还是需要很大工作量的,所以直接抄了例子里的,不过建模的源码和物理引擎都是可以看到的,还是有学习的价值的。
废话不多说,效果如下:

在后面给出仿真源文件,所以不说什么细节了。
按键操作:
O:切换红队
P:切换蓝队
Pgup:右旋转
Pgdn:左旋转
End:刹车
方向键:上下左右移动
WSAD:摄像头上下左右移动
仿真文件下载地址 文件解压密码: clliu
就当一个游戏玩也可以,祝玩的愉快。
阅读全文
0 0
- webots自学笔记(八)麦克纳母轮移动机器人平台,可控制摄像头视角
- webots自学笔记(二)节点与机器人建模
- webots自学笔记(三)控制器与电机控制
- webots仿真机器人平台
- webots仿真机器人平台
- webots自学笔记(六)实用控制器函数补充
- webots自学笔记(九)弹簧与阻尼添加
- webots自学笔记(七)通过定义顶点构件3D形状(IndexedFaceSet节点)
- webots自学笔记(一)软件界面和简单模型仿真
- webots自学笔记(一)软件界面和简单模型仿真
- webots自学笔记(一)软件界面和简单模型仿真
- webots自学笔记(一)软件界面和简单模型仿真
- webots自学笔记(一)软件界面和简单模型仿真
- webots自学笔记(一)软件界面和简单模型仿真
- webots自学笔记(一)软件界面和简单模型仿真
- webots自学笔记(四)传感器API使用、查看官方文档
- webots自学笔记(五)使用物理插件ODE建立铰链
- QT自学笔记(八)
- PyQt5+OpenCV+Matplotlib综合训练
- webots自学笔记(七)通过定义顶点构件3D形状(IndexedFaceSet节点)
- Unity读取.csv文件
- android ANR实例分析
- LuaFramework框架启动详细流程图
- webots自学笔记(八)麦克纳母轮移动机器人平台,可控制摄像头视角
- 一个写的比较牛逼的51定时器中断
- 五分钟学GIS | 快速认识 MapBox GL
- 文章标题
- 【swagger】前后端分离联调利器——swagger安装和使用
- Server Tomcat v8.0 Server at localhost failed to start.
- java基础--坦克大战(一)
- webots自学笔记(九)弹簧与阻尼添加
- 第一次构建maven项目出现的问题


