Dynamic Programming
来源:互联网 发布:无纸化会议软件定制 编辑:程序博客网 时间:2024/05/24 05:24
Dynamic Programming
标签(空格分隔): Reinforcement Learning: An Introduction
- Dynamic Programming
- Dynamic Programming
- Policy Evaluation
- Policy Improvement
- Policy Iteration
- Value Iteration
- Asynchronous Dynamic Programming
- Generalized Policy Iteration
- Efficiency of Dynamic Programming
- Dynamic Programming
Dynamic Programming
Policy Evaluation
Policy Evaluation 给定一个policy怎样来评价好坏的首先开门见山给出经典的贝尔曼迭代公式 
用state value 来评价Policy的好坏的(在这里假设,policy是一个固定的策略),于是在不断的进行马尔可夫决策过程,迭代 state value的值,最终达到收敛。 
在书中,作者提到 两种更新state value的方式:
(1)采用两个数组,一个存储新的state value值,另一个存储旧的state value的值,这种方式,就是 每次更新都计算旧的state value里面的值;
(2)第二种,采用一个数组,方式差不多,但是每次都用的是最新的state value;
作者在书中提到第二种方式收敛的比较快
下图给出了,iterative policy evaluation的伪代码: 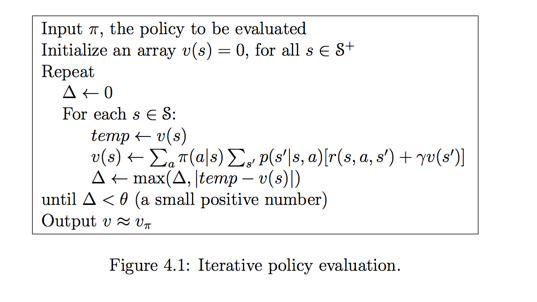
此外,作者还提到,Dynamic Programming是一种full back的方式。
full back:强化学习在进行贝尔曼公式迭代时,考虑到当前状态
st 的下一个状态st+1 的所有情况,并求期望值(平均值)
Policy Improvement
该小节,如何改进policy, 在MDP中,不断的完善Ploicy 初始的Policy可能大多数都是随机的,本节利用上一节的Poliy Evaluation来完善。
当一个策略改变时,我们可以用state value来评价,这个改变是否使Policy更好了。
于是,这一段作者引入了state-action value 
于是就可以量化策略的改变是往哪个方向发展的
若满足以下方式,则可认为变化再往好的方面发展 
于是,通过证明就可以得到以下结论: 
证明过程:
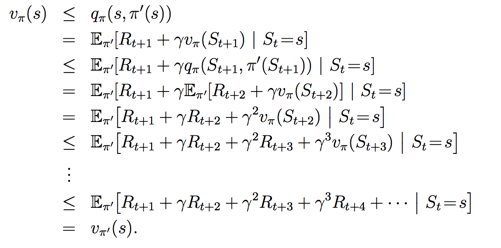
这样,就得到了一个贪心的想法,如果每次,都是取state-action value最大的action, 这样在不断的迭代过程中,就能不断优化当前策略 
这种贪心迭代方式被称为Policy Improvement,作者在本节结束举了个例子如下:

虽然上面的例子,不管是random policy 还是 greedy policy都能达到一样的策略,但是:
(1)greedy policy达到最佳值时,所用的迭代次数比较少;
(2)state value值 greedy policy 比较大
Policy Iteration
本节将policy evaluation和policy improvement结合进行policy 优化整体的policy优化策略如下: 
上图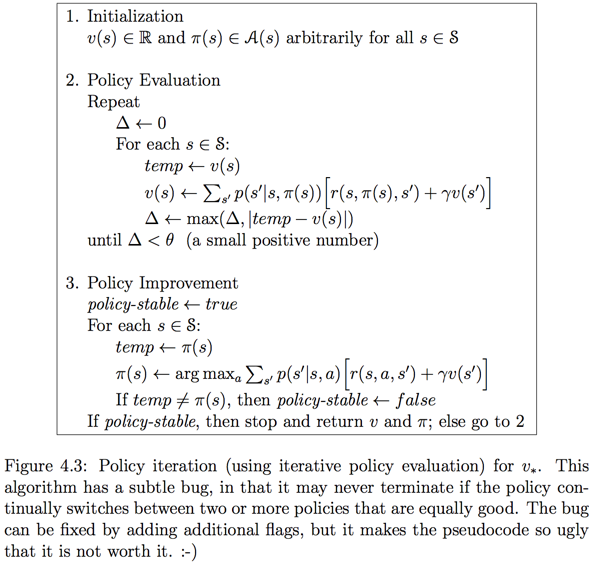
上面伪代码,说明的是,每一个策略都需要进行policy evaluation到达收敛后,再进行Policy improvement 依次这样循环
Value Iteration
本节解决的问题是,Policy Iteration中,训练过慢,计算量过大的问题作者给出的思路是,将policy evaluation 过程进行截断,然而,不影响收敛性。
最简单的方式是在policy evaluation的过程中,进行一次迭代,这样就加快了 
伪代码如下图所示: 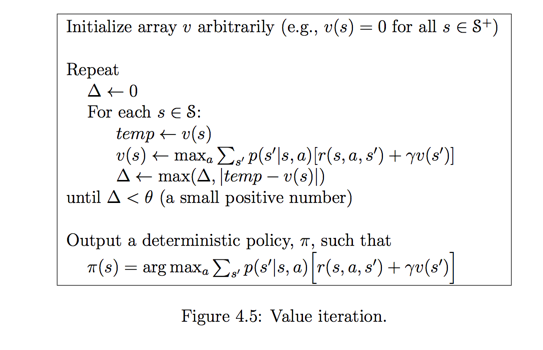
Asynchronous Dynamic Programming
该节面对的问题是Dynamic Programming 是一个full back,也就是说在当前状态下,需要遍历下一个状态所有的可能性,而导致计算量过大的文图作者采用的迭代方式是之前所说的用一个数组存放state value的形式,具体细节没看 以后用到深究
Generalized Policy Iteration
该节主要对policy iteration 作出解释,然后 说明policy evaluation和policy improvement 相互促进,相互竞争最后达到策略和state value最优化的双赢局面作者说明无论是policy iteration 和 value iteration 以及 Asynchronous Dynamic Programming都存在policy evaluation 和 policy improvement相互交互的局面,于是作者给了两张图形象的说明了 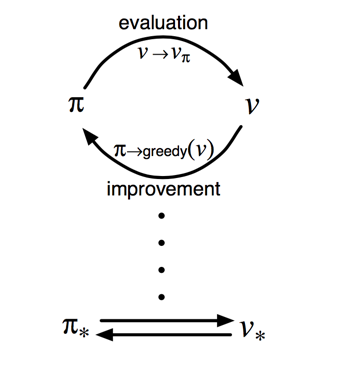
上面图说明了,evaluation和improvement如何相互作用的:
(1)对当前的策略
(2)用state value 进行贪心来improve policy,达到收敛
重复(1),(2)一直达到收敛
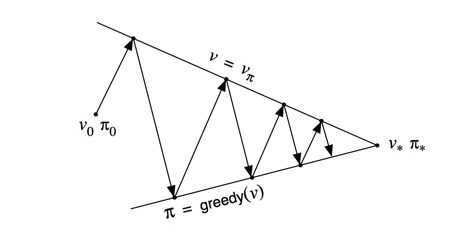
下面的图说明的是两个阶段最终达到收敛的过程
作者给了相应的解释: 
总的来说,如果evaluation阶段想要达到稳定 那么current policy 必须达到稳定;如果想要current policy 达到稳定 则,evaluation 的state value 也必须达到稳定。
作者提到两个阶段属于合作而又竞争的关系
(1)evaluation 的state value使得policy 不满足 greedy的关系;
(2)greedy的策略使得 当前的state value 不满足不断改变的策略。
Efficiency of Dynamic Programming
该节对Dynamic Programming这种算法的实用性进行辩证Dynamic Programming可能在强化学习领域不算是特别实用的方法,但是它也有实用性
优点:
(1)Dynamic Programming在能够保障算法的收敛性;
(2)相对于直接搜索或者线性求解来说,它在节省了计算量;
缺点:
对于复杂的环境来说,计算量超大,因为每次都要遍历所有的可能性
- dynamic programming
- Dynamic Programming
- Dynamic Programming
- dynamic programming
- Dynamic Programming
- dynamic programming
- Dynamic Programming
- Dynamic Programming
- Dynamic Programming
- Dynamic Programming
- Dynamic programming
- Dynamic Programming
- Dynamic Programming
- Dynamic Programming
- dynamic programming
- Dynamic Programming?
- Dynamic Programming
- Dynamic Programming
- mysql登录报错“Access denied for user 'root'@'localhost' (using password: YES”)的处理方法
- java作业
- MySql Host is blocked because of many connection errors; unblock with 'mysqladmin flush-hosts' 解决方法
- 输出文件到项目
- 拷贝构造函数和赋值运算符的重载的调用次数问题
- Dynamic Programming
- VMware Ubuntu安装详细过程(非常靠谱)
- SQL语句
- Pie(二分法+double输入用%lf,输出用%f!!!)
- 架构犹如探险,眼界必须超前
- numpy 学习
- TCP/IP网络编程学习之路一
- C++STL序列式容器的学习
- [HDU-1024]Max Sum Plus Plus


