树莓派-wiringPi-GPIO
来源:互联网 发布:interbase数据库 编辑:程序博客网 时间:2024/05/20 11:46
原文地址:http://nicekwell.net/blog/20171122/shu-mei-pai-wiringpi-gpio.html
GPIO接口在官网有详细的说明:http://wiringpi.com/reference/core-functions/
wiringPi的GPIO序号如下: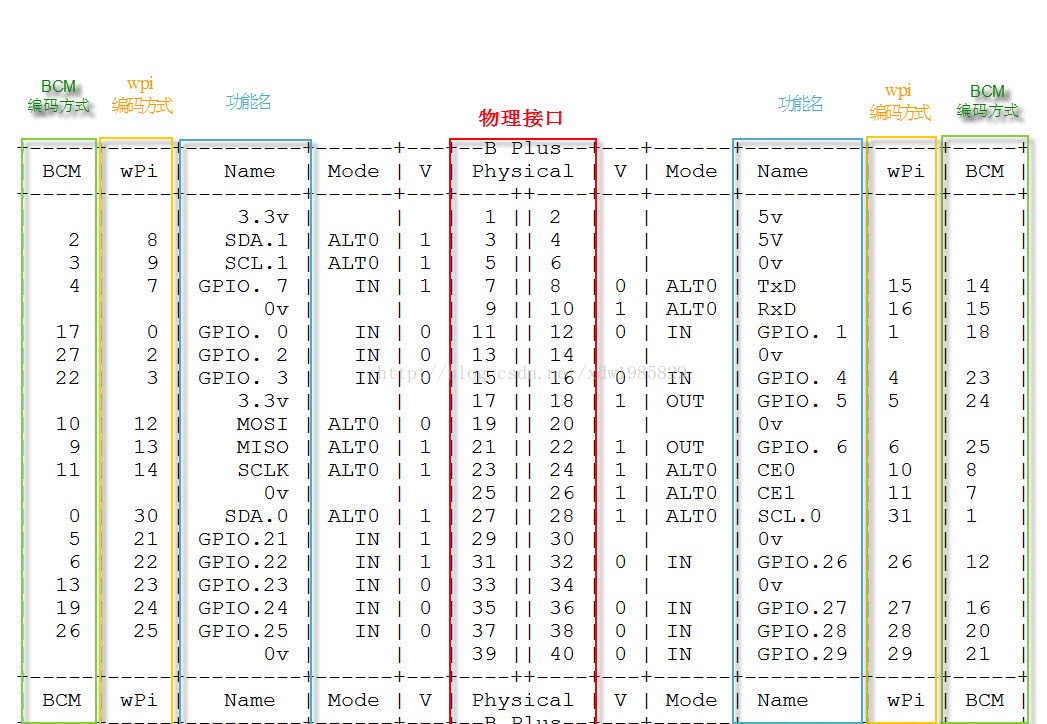
void pinMode (int pin, int mode) ;
设置GPIO模式。
pin是引脚序号,以何种方式编号在前面决定。
mode可以设置为:
只有具有相应功能的引脚才能设置为该功能。
void pullUpDnControl (int pin, int pud) ;
设置上下拉。
pin是引脚序号,以何种方式编号在前面决定。
pud是上下拉配置,可设置为:
void digitalWrite (int pin, int value) ;
设置指定引脚的输出。
pin是引脚序号,以何种方式编号在前面决定。
value是输出值,可以设置为:
void digitalWriteByte (int value) ;
int digitalRead (int pin) ;
读取指定引脚。
pin是引脚序号,以何种方式编号在前面决定。
返回的是该引脚的电平,返回HIGH或LOW。
void pwmWrite (int pin, int value) ;
设置pwn输出占空比。
pin是引脚序号,以何种方式编号在前面决定。(最新的树莓派里面好像把pwm功能去掉了)
value是占空比,范围是0~1023。
???在哪设置pwm的周期呢?
analogRead (int pin) ;
读入模拟量(AD)。
analogWrite (int pin, int value) ;
输出模拟量(DA)。
以上两个功能需要外加芯片,这里略去。
wiringPi-C控制GPIO的速度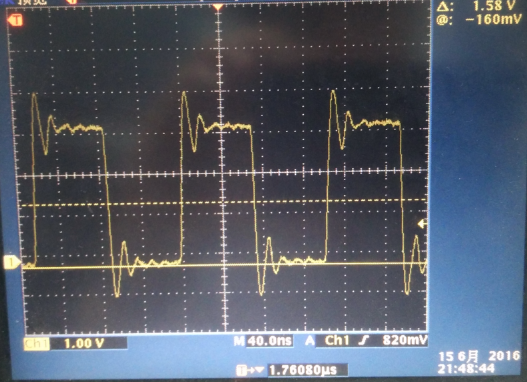
高低电平变化响应速度大约是80ns。(raspberry-gpio-python的速度大约是2us,大约是它的25倍)
注意,wiringPi-C也是在上层的程序,输出的波形同样是不稳定的。
- 树莓派-wiringPi-GPIO
- 树莓派学习笔记-GPIO接口编程-WiringPi
- 树莓派学习笔记——wiringPi GPIO使用详解
- 树莓派GPIO基础:WiringPi开发库基本使用
- 树莓派3QT+wiringPI控制GPIO输入和输出
- 树莓派wiringPI无root权限调用GPIO口
- 9、新手入手树莓派教程--WiringPi控制GPIO
- 9、新手入手树莓派教程--WiringPi控制GPIO
- 在Ubuntu环境下用QT5开发树莓派的GPIO程序(使用wiringPi库)之二 引入wiringPi库
- raspberry Pi on Archlinux, Install wiringPi , GPIO
- 为树莓派装上WiringPi
- 树莓派wiringPi输出PMW
- 树莓派wiringPi库详解
- 树莓派安装wiringPi库
- 树莓派-wiringPi-时间函数
- 树莓派-wiringPi-UART串口
- 在Ubuntu环境下用QT5开发树莓派的GPIO程序(使用wiringPi库)之一 搭建环境
- 在Ubuntu环境下用QT5开发树莓派的GPIO程序(使用wiringPi库)之三 DS18B20
- mysql的事件
- get和post方式能提交数据量大小比较
- 大牛的深度学习面试经验
- Only the original thread that created a view hierarchy can touch its views
- 如何抓取关机闹钟(Poweroff Alarm)相关log?
- 树莓派-wiringPi-GPIO
- 【Scikit-Learn 中文文档】使用 scikit-learn 介绍机器学习 | ApacheCN
- 多线程下载+断点续传+播放视频
- AngularJs实现购物车
- BZOJ1004:[HNOI2008]Cards (Burnside引理+DP+Exgcd)
- 自定义注解
- linux下操作mysql
- MVP加泛型,抽基类,解绑,多条目
- 关于Ijkitplayer配置


