(一)Q-learning
来源:互联网 发布:彩虹六号围攻网络eas 编辑:程序博客网 时间:2024/05/22 16:06
转自:http://www.cnblogs.com/cjnmy36723/p/7017549.html
一、思路

图 1.1
这里,先自己对那个例子的理解总结一下。
要解决的问题是:如上图 1.1 中有 5 个房间,分别被标记成 0-4,房间外可以看成是一个大的房间,被标记成 5,现在智能程序 Agent 被随机丢在 0-4 号 5 个房间中的任意 1 个,目标是让它寻找到离开房间的路(即:到达 5 号房间)。
图片描述如下:
图 1.2
给可以直接移动到 5 号房间的动作奖励 100 分,即:图1.2中,4 到 5 、 1 到 5 和 5 到 5 的红线。
在其它几个可移动的房间中移动的动作奖励 0 分。
如下图:
图 1.3
假设 Agent 当前的位置是在 2 号房间,这里就将 Agent 所在的位置做为“状态”,也就是 Agent 当前的状态是2,当前 Agent 只能移动到 3 号房间,当它移动到 3 号房间的时候,状态就变为了 3,此时得到的奖励是 0 分。
而 Agent 根据箭头的移动则是一个“行为”。
根据状态与行为得到的奖励可以组成以下矩阵。

图 1.4
同时,可以使用一个 Q 矩阵,来表示 Agent 学习到的知识,在图 1.4 中,“-1”表示不可移动的位置,比如从 2 号房间移动到 1 号房间,由于根本就没有门,所以没办法过去。
图 1.5
该 Q 矩阵就表示 Agent 在各种状态下,做了某种行为后自己给打的分,也就是将经验数据化,由于 Agent 还没有行动过,所以这里全是 0。
在 Q-Learning 算法中,计算经验得分的公式如下:
Q(state, action) = Q(state, action) + α(R(state, action) + Gamma * Max[Q(next state, all actions)] - Q(state, action))
当 α 的值是 1 时,公式如下:
Q(state, action) = R(state, action) + Gamma * Max[Q(next state, all actions)]
state: 表示 Agent 当前状态。
action: 表示 Agent 在当前状态下要做的行为。
next state: 表示 Agent 在 state 状态下执行了 action 行为后达到的新的状态。
Q(state, action): 表示 Agent 在 state 状态下执行了 action 行为后学习到的经验,也就是经验分数。
R(state, action): 表示 Agent 在 state 状态下做 action 动作后得到的即时奖励分数。
Max[Q(next state, all actions)]: 表示 Agent 在 next state 状态下,自我的经验中,最有价值的行为的经验分数。
Gamma: ,γ,表示折损率,也就是未来的经验对当前状态执行 action 的重要程度。
二、算法流程
Agent 通过经验去学习。Agent将会从一个状态到另一个状态这样去探索,直到它到达目标状态。我们称每一次这样的探索为一个场景(episode)。
每个场景就是 Agent 从起始状态到达目标状态的过程。每次 Agent 到达了目标状态,程序就会进入到下一个场景中。
1. 初始化 Q 矩阵,并将初始值设置成 0。
2. 设置好参数 γ 和得分矩阵 R。
3. 循环遍历场景(episode):
(1)随机初始化一个状态 s。
(2)如果未达到目标状态,则循环执行以下几步:
① 在当前状态 s 下,随机选择一个行为 a。
② 执行行为 a 得到下一个状态 s`。
③ 使用 Q(state, action) = R(state, action) + Gamma * Max[Q(next state, all actions)] 公式计算 Q(state, action) 。
④ 将当前状态 s 更新为 s`。
设当前状态 s 是 1, γ =0.8和得分矩阵 R,并初始化 Q 矩阵:
由于在 1 号房间可以走到 3 号房间和 5 号房间,现在随机选一个,选到了 5 号房间。
现在根据公式来计算,Agent 从 1 号房间走到 5 号房间时得到的经验分数 Q(1, 5) :
1.当 Agent 从 1 号房间移动到 5 号房间时,得到了奖励分数 100(即:R(1, 5) = 100)。
2.当 Agent 移动到 5 号房间后,它可以执行的动作有 3 个:移动到 1 号房间(0 分)、移动到 4 号房间(0 分)和移动到 5 号房间(0 分)。注意,这里计算的是经验分数,也就是 Q 矩阵,不是 R 矩阵!
所以,Q(1, 5) = 100 + 0.8 * Max[Q(5, 1), Q(5, 4), Q(5, 5)] = 100 + 0.8 * Max{0, 0, 0} = 100
在次迭代进入下一个episode:
随机选择一个初始状态,这里设 s = 3,由于 3 号房间可以走到 1 号房间、 2 号房间和 4 号房间,现在随机选一个,选到了 1 号房间。
步骤同上得:Q(3, 1) = 0 + 0.8 * Max[Q(1, 3), Q(1, 5)] = 0 + 0.8 * Max{0, 100} = 0 + 0.8 * 100 = 80
即:
三、程序实现
先引入 numpy:
import numpy as np初始化:
# 动作数。ACTIONS = 6# 探索次数。episode = 100# 目标状态,即:移动到 5 号房间。target_state = 5# γ,折损率,取值是 0 到 1 之间。gamma = 0.8# 经验矩阵。q = np.zeros((6, 6))def create_r(): r = np.array([[-1, -1, -1, -1, 0, -1], [-1, -1, -1, 0, -1, 100.0], [-1, -1, -1, 0, -1, -1], [-1, 0, 0, -1, 0, -1], [0, -1, -1, 1, -1, 100], [-1, 0, -1, -1, 0, 100], ]) return r
执行代码:
特别注意红色字体部分,当程序随机到不可移动的位置的时候,直接给于死亡扣分,因为这不是一个正常的操作,比如 从 4 号房间移动到 1 号房间,但这两个房间根本没有门可以直接到。
至于为什么不使用公式来更新,是因为,如果 Q(4, 5)和Q(1, 5)=100分,
当随机到(4, 1)时,Q(4, 1)的经验值不但没有减少,反而当成了一个可移动的房间计算,得到 79 分,即:Q(4, 1) = 79,
当随机到(2, 1)的次数要比(4, 5)多时,就会出现Q(4, 1)的分数要比Q(4, 5)高的情况,这个时候,MaxQ 选择到的就一直是错误的选择。
if __name__ == '__main__': r = create_r() print("状态与动作的得分矩阵:") print(r) # 搜索次数。 for index in range(episode): # Agent 的初始位置的状态。 start_room = np.random.randint(0, 5) # 当前状态。 current_state = start_room while current_state != target_state: # 当前状态中的随机选取下一个可执行的动作。 current_action = np.random.randint(0, ACTIONS) # 执行该动作后的得分。 current_action_point = r[current_state][current_action] if current_action_point < 0: q[current_state][current_action] = current_action_point else: # 得到下一个状态。 next_state = current_action # 获得下一个状态中,在自我经验中,也就是 Q 矩阵的最有价值的动作的经验得分。 next_state_max_q = q[next_state].max() # 当前动作的经验总得分 = 当前动作得分 + γ X 执行该动作后的下一个状态的最大的经验得分 # 即:积累经验 = 动作执行后的即时奖励 + 下一状态根据现有学习经验中最有价值的选择 X 折扣率 q[current_state][current_action] = current_action_point + gamma * next_state_max_q current_state = next_state print("经验矩阵:") print(q) start_room = np.random.randint(0, 5) current_state = start_room step = 0 while current_state != target_state: next_state = np.argmax(q[current_state]) print("Agent 由", current_state, "号房间移动到了", next_state, "号房间") current_state = next_state step += 1 print("Agent 在", start_room, "号房间开始移动了", step, "步到达了目标房间 5")
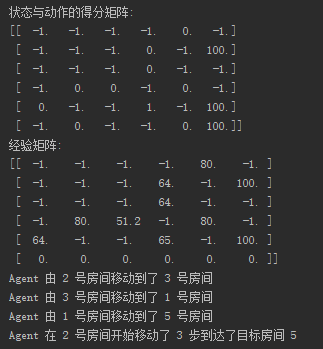
下面是运行结果图:
完整代码:
import numpy as np# 动作数。ACTIONS = 6# 探索次数。episode = 100# 目标状态,即:移动到 5 号房间。target_state = 5# γ,折损率,取值是 0 到 1 之间。gamma = 0.8# 经验矩阵。q = np.zeros((6, 6))def create_r(): r = np.array([[-1, -1, -1, -1, 0, -1], [-1, -1, -1, 0, -1, 100.0], [-1, -1, -1, 0, -1, -1], [-1, 0, 0, -1, 0, -1], [0, -1, -1, 1, -1, 100], [-1, 0, -1, -1, 0, 100], ]) return rdef get_next_action(): # # 获得当前可执行的动作集合。 # actions = np.where(r[current_state] >= 0)[0] # # # 获得可执行的动作数。 # action_count = actions.shape[0] # # # 随机选取一个可执行的动作。 # next_action = np.random.randint(0, action_count) # # # 执行动作,获得下一个状态。 # next_state = actions[next_action] next_action = np.random.randint(0, ACTIONS) return next_actionif __name__ == '__main__': r = create_r() print("状态与动作的得分矩阵:") print(r) # 搜索次数。 for index in range(episode): # Agent 的初始位置的状态。 start_room = np.random.randint(0, 5) # 当前状态。 current_state = start_room while current_state != target_state: # 当前状态中的随机选取下一个可执行的动作。 current_action = get_next_action() # 执行该动作后的得分。 current_action_point = r[current_state][current_action] if current_action_point < 0: q[current_state][current_action] = current_action_point else: # 得到下一个状态。 next_state = current_action # 获得下一个状态中,在自我经验中,也就是 Q 矩阵的最有价值的动作的经验得分。 next_state_max_q = q[next_state].max() # 当前动作的经验总得分 = 当前动作得分 + γ X 执行该动作后的下一个状态的最大的经验得分 # 即:积累经验 = 动作执行后的即时奖励 + 下一状态根据现有学习经验中最有价值的选择 X 折扣率 q[current_state][current_action] = current_action_point + gamma * next_state_max_q current_state = next_state print("经验矩阵:") print(q) start_room = np.random.randint(0, 5) current_state = start_room step = 0 while current_state != target_state: next_state = np.argmax(q[current_state]) print("Agent 由", current_state, "号房间移动到了", next_state, "号房间") current_state = next_state step += 1 print("Agent 在", start_room, "号房间开始移动了", step, "步到达了目标房间 5")
- (一)Q-learning
- 强化学习入门 : 一文入门强化学习 (Sarsa、Q learning、Monte-carlo learning、Deep-Q-Network等)
- 备注 强化学习入门 : 一文入门强化学习 (Sarsa、Q learning、Monte-carlo learning、Deep-Q-Network等)
- 增强学习(Q-learning)
- Q-learning寻径(练手)
- Q-learning
- Q-learning
- Q-learning
- Reinforment Learning 学习笔记(二) Q-Learning
- Q-learning--定义--过程
- Q-Learning实现
- Q-Learning分析
- 增强学习 | Q-Learning
- Q-learning 学习心得
- Q-Learning算法学习
- Q-learning算法
- Q-learning学习笔记
- Q-learning算法实现
- API开发之封装接口数据返回函数
- OpenJ_Bailian 4127 迷宫问题(DFS+BFS)
- 欢迎使用CSDN-markdown编辑器
- poj2828——Buy Tickets
- Spring报错: Unable to determine the correct call signature
- (一)Q-learning
- 电脑上调试手机网站的几种方法
- c++中的stl排序
- 使用 Istio Service Mesh 管理微服务
- 关于Audio你应该知道的一点知识
- 图的深度(广度)优先搜索
- tensorflow 安装
- CNN网络中,feature map感受野的计算
- XXX.APP已损坏,打不开.你应该将它移到废纸篓


