Human Pose Matching on mobile — a fun application using Human Pose Estimation (Part 1 Intro)
来源:互联网 发布:pf软件 编辑:程序博客网 时间:2024/06/05 17:47
Human pose estimation -computationally detecting human body posture- is rising. These technologies capable of detection the human body joints are becoming effective and accessible. And they look astonishing, have a look:
This video is made using OpenPose and it’s impressing
OpenPose represents the first real-time system to jointly detect human body, hand and facial keypoints (in total 130 keypoints) on single images. In addition, the system computational performance on body keypoint estimation is invariant to the number of detected people in the image
This OpenPose library is a wonderful example of *buzzword incoming* Deep Learning. This library is built upon a neural network and has been developed by Carnegie Mellon University. OpenPose uses an interesting pipeline to achieve it’s robust performance. If you want to dig into this topic, the paper “Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields” gives an overview of the inner workings of the system.
If you are looking for alternative algorithms, take a look at DeeperCut. Here is an implementation in Python.

Mobile Development — The Opertunities
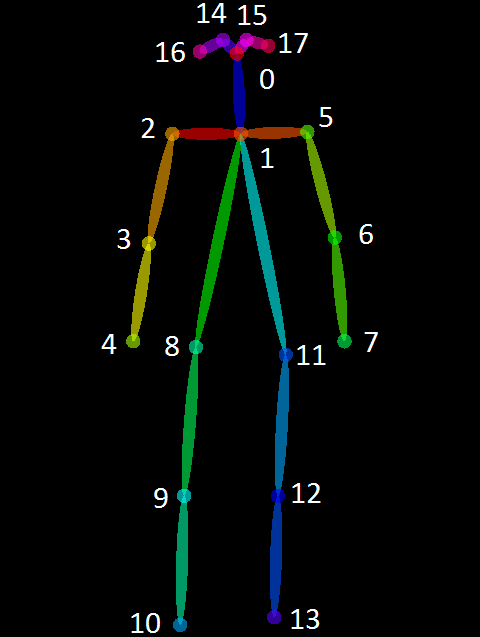
So, the magic of Deep Learning gives us 18 human body joints. WHAT CAN WE DO WITH IT? A lot actually. Samin does a good job listing the possibilities in his blog.
The fact that these pose estimators work with just a normal camera, opens doors for mobile development. Imagine using these technology with your shitty smartphone camera. OK, I admit; I want to develop for smartphone, so (ideally?) everything runs embedded on the smartphone itself. This means, the implementation is capable of running on CPU or smartphone GPU. BUT, as these Estimator Algorithms currently run on some pretty decent GPUs , this is surely a point of discussion. Most of the new smartphones these days have a GPU on board, but are they capable of running these frameworks? To nuance for this case, the (multi-person) keypoint detection doesn’t need to be real-time, as there is only 1 picture (no real-time video) and a delay time of 1 to 1,5 seconds is acceptable.
However, working embedded is not a must, it’s also possible to outsource the estimation/matching algorithm to a central server containing a decent GPU. This particular choice, embedded or out-sourcing, is an issue that involves a lot of parameters (performance/computation power, server cost, accuracy, mobile battery usage, delay server communication, multi platform, scalability, mobile data usage -less important- , …).
Similarity of different poses — The Application
I’m working on a project where a person must mimic a predefined pose (call it the model). A picture is made from the person that mimics this predefined pose. Then, with the help of OpenPose the human pose of the person is extracted from this image and compared with the predefined pose. Finally a scoring mechanism decides how well the two poses match or if they match at all.
This desired project raises two big problems tough:
1. Porting OpenPose to Mobile Platform
I didn’t tell you yet, but OpenPose is build with Caffe, a Deep Learning framework. Caffe is OK, but it doesn’t support Android, not mentioning iOS. There are plenty of other Deep Learning libraries, yet the mainstream library is TensorFlow, a Machine Learning framework developed by Google. And surprise surprise, TensorFlow supports Android (of course, it’s made by Google) and iOS! Great!
So, TensorFlow it is then? I don’t know for sure yet. Still considering/researching the options … Hope to get back on this in the near future.
The community working on this topic is quite small, but it is growing. Actually Ale Solano is working on this currently, he is trying to port the OpenPose-Caffe library to TensorFlow and he is also blogging about it! He’s making good progress.
2. How to determine similarity between 2 sets of matching 2D points
Let’s say the previous succeeded, and we have the 2D joint points of two poses:
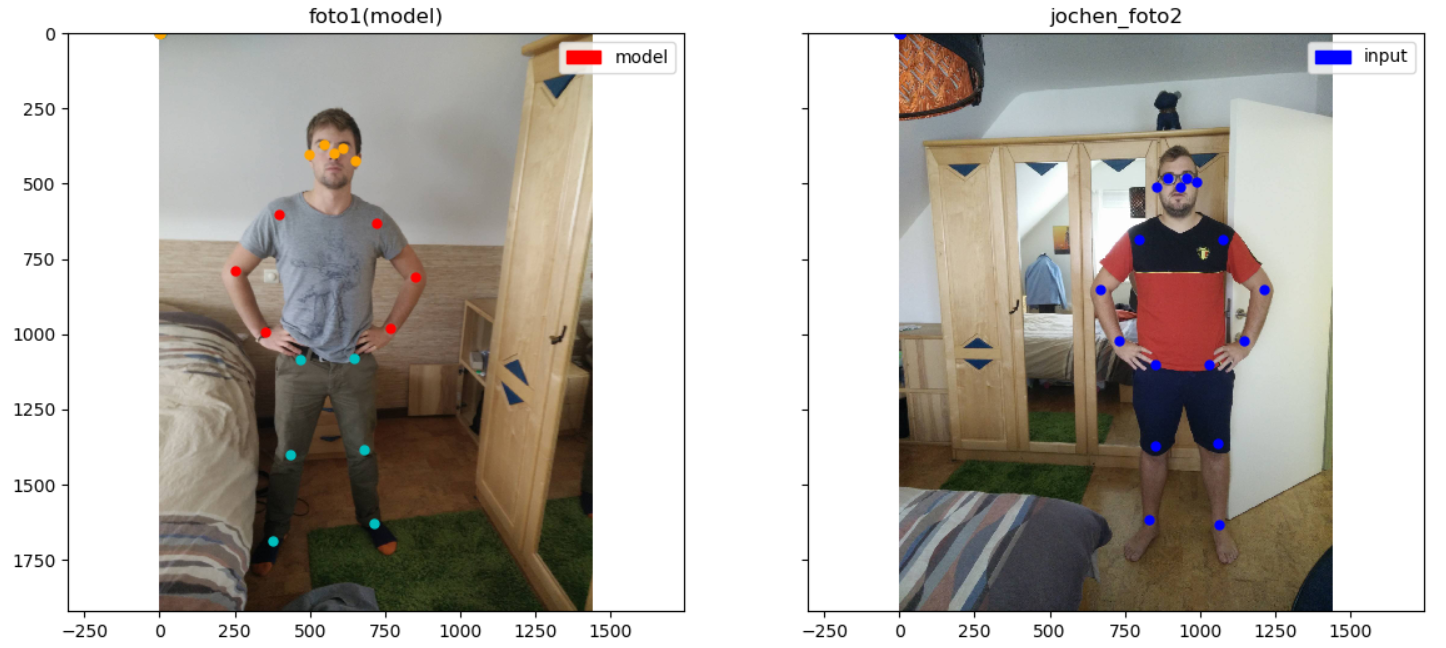
So we have 2 sets of matching points (each consisting of 18 2D coordinates);
1. The model X (which needs to be mimicked) -left hand side
2. The input Y (needs to be checked on matching grade) -right hand side
Essentially this comes down to checking if the two poses (described by their 18 2D coordinates) are similar.
“Two geometrical objects are called similar if they both have the same shape, or one has the same shape as the mirror image of the other. More precisely, one can be obtained from the other by uniformly scaling (enlarging or reducing), possibly with additional translation, rotation and reflection. This means that either object can be rescaled, repositioned, and reflected, so as to coincide precisely with the other object.” — Wikipedia
This means, two poses have the same shape if you can transform one pose to the other one using only a combination of translation, scaling and rotation. From Linear Algebra, we know this combination of operations is wrapped in a linear transformation, more precisely an affine transformation(composition of linear map and a translation).
This linear transformation is described by it’s transformation matrix [2x3]. So this is the first step: find the transformation matrix. You want this matrix? Solve the linear system et voilà!
You wish. There is noway two different poses are exactly described by an affine transformation on each other -ie are similar-, what’s the chance? One way or an other there will be some noise introduced, these are people in the wild you know. Hence, we want something that gives us an approximate. Luckily, there exists something like least-squares algorithm, which will do the job for us. Math to the rescue again!
Assuming we have the transformation matrix, the next step is to transform the second pose onto the model. Now we can compare the image of the second pose and the model with each other. If all their corresponding points are adjacent, we can conclude the two poses match. From the moment a distance exceeds a certain threshold, they’re different.
I’ve been quite vague in the last two steps. I know.
That’s because I’m not sure yet about the ‘how’ precisely. I can list you all possible options I figured out, but that’s not useful I guess. I need to make some choices and try to find the best combination.
There are many ways to determine if the image of the second pose matches with the model (first pose). An option is, as suggested above, to limit the max (Euclidean) distance between two matching points by a determined threshold. But as there are many other distance metrics, there are some other ways to compute this transformation error.
The same applies for finding the transformation matrix. You can split the problem in multiple smaller problems ( ie face , torso and legs) or keep the body as whole or something else. What’s the way to go?
As always, some approaches are more effectively then others
In the weeks to come, I will try to setup a test case and test on all these different parameters.
https://becominghuman.ai/human-pose-matching-on-mobile-a-fun-application-using-human-pose-estimation-part-1-intro-93c5cbe3a096
- Human Pose Matching on mobile — a fun application using Human Pose Estimation (Part 1 Intro)
- annotation code for human pose estimation
- Stacked Hourglass Networks for human pose estimation
- 论文阅读:Personalizing Human Video Pose Estimation
- 身体姿势估计 - Human Pose Estimation
- Stacked Hourglass Networks for Human Pose Estimation
- [姿态预测] Advancing Human Pose and Gesture Recognition章节 Pose Estimation with a Deep Heatmap Network
- [深度学习论文笔记][Human Pose Estimation] DeepPose: Human Pose Estimation via Deep Neural Networks
- 行人属性“Attributed Grammars for Joint Estimation of Human Attributes, Part and Pose”
- 姿态论文整理--04-Human pose estimation using global and local normalization
- human pose/joints annotation
- DeepPose: Human Pose Estimation via Deep Neural Networks(精读)
- Multi-source Deep Learning for Human Pose Estimation(泛读)
- DeepPose: Human Pose Estimation via Deep Neural Networks 阅读笔记
- Flowing ConvNets for Human Pose Estimation in Videos
- 论文阅读:Poselet-Based Contextual Rescoring for Human Pose Estimation
- 阅读小结:Stacked Hourglass Networks for Human Pose Estimation
- [姿态预测] Flowing ConvNets for Human Pose Estimation in Videos
- 如何在k8s集群中安装nvidia、cuda并使用GPU进行训练
- HDoj 1033 Edge (英语理解题)
- RxJava操作符记录
- 机器学习系统模型调优实战--所有调优技术都附相应的scikit-learn实现
- 下拉刷新数据
- Human Pose Matching on mobile — a fun application using Human Pose Estimation (Part 1 Intro)
- Tomcat8+Spring-Security 启用安全通道(https)的一步步实现
- 水仙花素
- Unexpected char 0xa0 at 7 in Cache-Control value: public, only-if-cached, max-stale=2419200
- Protostuff 序列化/反序列化集合等对象
- Ubuntu安装Chrome浏览器
- 650. 2 Keys Keyboard
- ssm框架 里面查询列表,显示出来有字段漏掉(或者说少显示)
- 《Android进阶之光》学习笔记——第三章 View体系与自定义View


