OpenCV三种立体匹配求视差图算法总结
来源:互联网 发布:java冒泡排序法 编辑:程序博客网 时间:2024/05/01 08:21
对OpenCV中涉及的三种立体匹配算法进行代码及各自优缺点总结:
首先我们看一下BM算法:
该算法代码:
其中minDisparity是控制匹配搜索的第一个参数,代表了匹配搜苏从哪里开始,numberOfDisparities表示最大搜索视差数uniquenessRatio表示匹配功能函数,这三个参数比较重要,可以根据实验给予参数值。
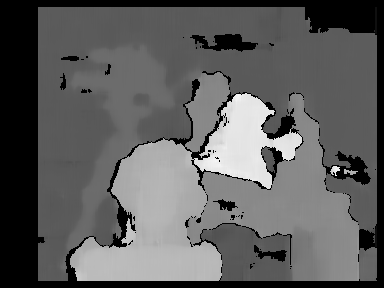
该方法速度最快,一副320*240的灰度图匹配时间为31ms,视差图如下。
第二种方法是SGBM方法这是OpenCV的一种新算法:
各参数设置如BM方法,速度比较快,320*240的灰度图匹配时间为78ms,视差效果如下图。

第三种为GC方法:
该方法速度超慢,但效果超好。

各方法理论可以参考文献。
- OpenCV三种立体匹配求视差图算法总结
- OpenCV三种立体匹配求视差图算法总结
- OpenCV三种立体匹配求视差图算法总结
- OpenCV三种立体匹配求视差图算法总结
- OpenCV三种立体匹配求视差图算法总结
- OpenCV三种立体匹配求视差图算法总结
- OpenCV三种立体匹配求视差图算法总结
- OpenCv中实现了三种立体匹配算法:
- 双目测距与三维重建的OpenCV实现问题集锦(三)立体匹配与视差计算
- 基于Opencv的几种立体匹配算法+ELAS
- OpenCV学习笔记(18)双目测距与三维重建的OpenCV实现问题集锦(三)立体匹配与视差计算
- OpenCV学习笔记(18)双目测距与三维重建的OpenCV实现问题集锦(三)立体匹配与视差计算
- Opencv中三种立体匹配算法的比较
- 【OpenCV】立体匹配算法 StereoBM/StereoSGBM/StereoVar
- 立体匹配的视差搜索范围
- 双目立体视差图计算
- 立体视频视差图的几种计算方法
- SAD立体匹配算法在opencv中的实现
- debian下使用dpkg来安装/卸载deb包
- DataTable使用技巧总结
- Android native C 程序中输出LOG信息
- 《Java是如何快速煮成C#的?》(一):相似的方法
- EAS修改客户端代码后热部署的方法
- OpenCV三种立体匹配求视差图算法总结
- main.obj : error LNK2001: unresolved external symbol ___security_cookie
- 【日志】日志扫盲
- 谁能给我个0060的KX连线图啊
- 最全的asp.net 开源CMS汇总
- [WPF] WPF Puzzle
- 对于重装系统后,迅雷弹出“init task manager failed”错误解决方法
- QTextCursor的一些用法
- js获得浏览器类型


