基于OpenCV的运动目标检测跟踪系统在PC上的软件设计流程
来源:互联网 发布:怎样优化亚马逊关键词 编辑:程序博客网 时间:2024/05/01 01:47
数字图像处理中,运动物体的检测和跟踪在机器人视觉、监控测量和视频压缩编码等方面有着广泛的应用,是近年来的一个研究热点。随着研究的深入,应用于运动物体跟踪的算法也越来越多:从最简单的“帧差法”,到“背景消减法”到“模板匹配法”,到带有预测功能的“卡尔曼滤波”和“粒子滤波”等算法,都在不断地提高对运动目标检测和跟踪的准确性和高效性。
本平台在进行运动物体检测跟踪时所采用的算法是:首先利用“帧差法”检测出初始的运动目标;一旦认为此目标合法,便根据目标在HSI(色调、饱和度、强度)空间中H通道的色调特性,利用“连续适应性均值移动算法(CamShift)”,对目标进行跟踪。
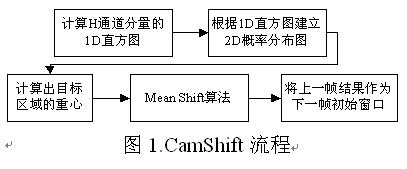
CamShift算法简述如下:首先,在图像HSI空间中计算H通道(色彩通道)分量的1D直方图;接着,利用此1D直方图将原图改建成2D概率分布图;第三步,计算出目标区域的重心;第四部,利用经典的“Mean Shift”算法,不断平移调整窗口中心到与目标重心重合;第五步,将上一帧的窗口大小和中心,作为下一帧Mean Shift算法搜索窗口的初始值,在下一帧中继续Mean Shift运算。
上述运动物体检测和跟踪的算法运算量小,跟踪效果好。只要初始抓取目标无误,并且在色彩空间上目标与背景有一定偏差,视频跟踪便能够达到相当的准确度。更好的一点是,此算法在跟踪同一场境内多个运动目标其中的一个时的效果,是其它同样计算复杂度的算法所难以比拟的。
为了达到良好的实时性能,充分利用CPU资源,本平台采用多线程并发处理模式进行编程。在Windows操作系统下,线程与进程调度都有着一套封装好的方法,各线程轮流占用CPU资源。既然没有多个CPU进行真正的程序“并发”执行,多线程编程要做的就是如何利用线程的“休眠”事件,合理充分地使用资源,以达到提高程序运行效率的目的。
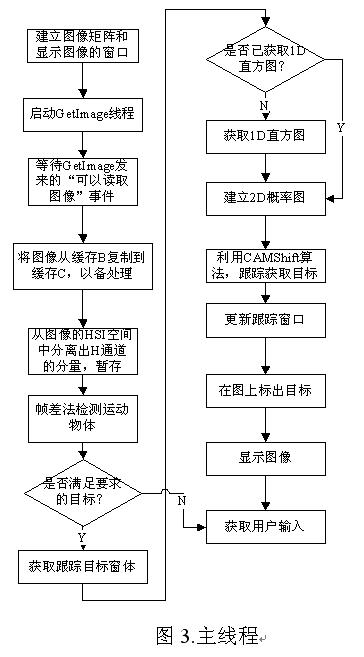
本平台中,程序由两个线程组成:main线程和GetImage线程。Main线程作为主线程,它启动了GetImage线程;除此之外main线程的主要功能就是利用OpenCV函数库,对从摄像头获取的图像数据进行分析处理;此外main线程还负责获取用户输入信息。GetImage线程的主要工作就是循环地从摄像头读取数据放到缓存中,以供main线程分析。在这当中,GetImage线程往缓存中写数据与从缓存中读数据将不可避免地操作同一块缓存;为防止数据读写冲突出错,两线程在操作这块缓存时都必须上锁。这在本平台程序中是通过“互斥量”来实现的。另外,为防止main线程重复地分析同一帧图像,要求main线程必须等待GetImage线程的一个信号才能进行数据读取和分析,这在平台程序中是通过Wait/Object的方式来实现的。
程序流程图如图2、图3所示。
 ~~~
~~~
实验结果
经过实验证明,基于OpenCV的运动目标检测跟踪实验平台可以在实时显示图像的基础上,实时检测和跟踪运动目标,并且检测和跟踪具有较高的鲁棒性。在跟踪过程中,即时目标保持静止,程序也不会丢失对目标的跟踪。
- 基于OpenCV的运动目标检测跟踪系统在PC上的软件设计流程
- 基于OpenCV和Android的运动目标检测系统
- 基于opencV的动态背景下运动目标检测及跟踪(修改版)
- 【Python+OpenCV】目标跟踪-实现基本的运动检测
- 一种基于轮廓的运动目标检测与跟踪算法
- 一种基于边缘的运动目标检测与跟踪算法
- 基于opencv的L-K光流法跟踪运动目标
- OpenCV之基于GMM的运动目标检测
- 【OPENCV】基于背景差法的运动目标检测
- 基于模板匹配的运动目标跟踪
- 对视频序列的 运动检测 目标跟踪(运动目标的检测与跟踪)
- OpenCV实现运动目标检测的函数
- 视频运动目标跟踪,基于opencv , vc++
- 笔记 基于OpenCV的目标跟踪软件与系统实现
- 基于光流分析的运动目标快速检测与跟踪融合算法
- 关于在fpga上进行目标检测、跟踪的设计
- 基于Vibe算法的运动目标检测
- 基于帧间差分法的运动目标检测
- JSON 数据 演示
- Silverlight PDF报表
- 字符和字符串的关系:字符串可以看成是只读字符数组
- 《Programming Pearls》 - 书摘精要
- HTTP状态码(HTTP Status codes)简介
- 基于OpenCV的运动目标检测跟踪系统在PC上的软件设计流程
- How can I create a data binding in code using WPF?
- WPF:菜单
- 计算机网络常见协议及其格式
- android源码结构
- ping原理及应用
- Hadoop安装指南 / Hive安装指南
- Spring+Hibernate框架下MySql读写分离,主从数据库配置
- C++编程常见错误整理


