常用坐标系及坐标系之间的变换
来源:互联网 发布:jsp网上商城源码下载 编辑:程序博客网 时间:2024/05/02 21:50
坐标系统:有哪些坐标系,他们之间的变换矩阵是怎样的?(主要是3个坐标系3个角)
地理坐标系(n系)
坐标系原点On取为飞行器质心。Xn轴向指向北,Yn轴正向指向天,Zn轴正向指向东。
简单地说:XYZ就是北天东
地理坐标系相对于地球坐标系的关系就是飞行器的地理位置,即经度λ和纬度L。
载(弹)体坐标系(b系)
载(弹)体坐标系的原点0为载体(导弹)质心。ox轴为载(弹)体外壳对称轴(纵轴),指向导弹头部。定义发射瞬时的射击为导弹的主对称面,oy轴在导弹主对称面内垂直于ox轴(竖轴也叫立轴)。oz轴(横轴)垂直于主对称面,顺着发射方向看过去,指向右方。oy轴指向使得弹体坐标系成为右手直角坐标系的方向。
坐标系原点Ob为飞行器质心,Xb轴沿载体纵轴方向,Yb轴沿载体竖轴方向,Zb轴沿载体侧轴方向。
简单地说:X是导弹飞行方向,Z指向右翼,Y是右手坐标系而成(即指向天)
PS:右手坐标系就是大拇指指向Z,手指弯曲方向从X到Y是90°。
载体坐标系相对于地理坐标系的关系就是载体的姿态。
速度坐标系
导弹质心为原点O.OXc轴沿导弹质心的运动方向,指向前为正;OYc轴在导弹的纵向对称的平面内,与OXc垂直,向上为正;OZc轴与OXc和OYc平面垂直,方向按右手直角坐标系法则确定。
简单地说:与弹上坐标系一样
其他的一些坐标系
1、世界坐标系(W-BLH)
W为原点,B为经度,L为纬度,H为海拔高度
2、飞行器固联的下视相机的像空坐标系
飞行器固联的下视相机的像空坐标系O_UVZ的原点O为相机光心,也为飞行器的质心。相机光轴与OZ轴重合,OZ轴正向与飞行器竖轴重合并由机底指向机顶。OV轴正向与飞行器纵轴重合并由机头指向机尾,OV轴与OY轴重合,但OV轴正向与OY轴正向相反。OU轴正向与飞行器纵轴垂直并由右机翼指向左机翼,OU轴与OX轴重合,但OU轴正向与OX轴正向相反。
3、飞行器拍摄照片时的像平面坐标系
飞行器拍摄照片时的像平面坐标系C_HW的原点C为图像的左上角起始角点。CW轴正向为照片的列增加方向,CW轴正向平行于OV轴, 并与飞行器纵轴平行且由机头指向机尾。CH轴正向为照片的行增加方向,CH轴正向平行于OU轴,并与飞行器纵轴垂直且由右机翼指向左机翼。
三个重要角度
导弹的姿态有三种情况:绕x轴(沿轨道前进的切线方向)旋转的姿态角,称之为滚动;绕y轴(垂直于轨道面)旋转的姿态角,称俯仰;绕z轴(垂直于0-xy面)旋转的姿态角,称航偏。
俯仰角pitch
机体坐标系X轴与水平面的夹角。当X轴的正半轴位于过坐标原点的水平面之上时,俯仰角为正,按习惯,俯仰角θ的范围为:-π/2≤θ≤π/2。(简言之:上为正下为负)
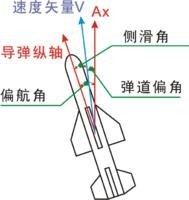
俯仰角=攻角+弹道倾角(理解下图即可)

航偏角yaw
导弹纵轴在水平面上投影与地面坐标系Ax轴(在水平面上,指向目标为正)之间的夹角,由Ax轴逆时针转至导弹导弹纵轴的投影线时,偏航角为正,反之为负(图中的偏航角为正)。(简言之:左为正右为负)

侧滚角roll(又称横滚角、转滚角)
目标物体所在平面上,与艏艉线垂直的线与其在水平面的投影间的夹角。
侧滑角(AOS, angle of sideslip)
导弹的轴线与导弹的飞行速度方向在水平面内的夹角。
侧滑角是速度矢量V与导弹纵向对称平面之间的夹角,是速度坐标系与弹体坐标系之间的关系;而偏航角是导弹纵轴在水平面上投影与地面坐标系Ax轴(在水平面上,指向目标为正)之间的夹角,是地面坐标系与弹体坐标系之间的角度关系。(与航偏角区分)
坐标系之间的主要变换
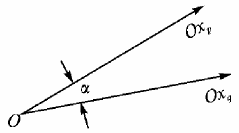
1、两个矢量坐标系之间的变换


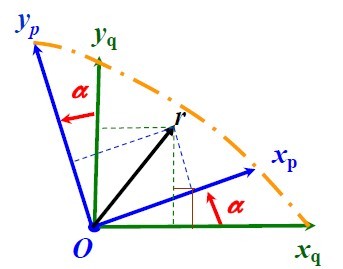
2、平面坐标系各轴间的转换
如下图所示,矢量r,在两个原点重合的坐标系中分量分别为(xp,yp),(xq,yq),α为q到p的旋转角,则有

3、三维坐标系各轴间的转换
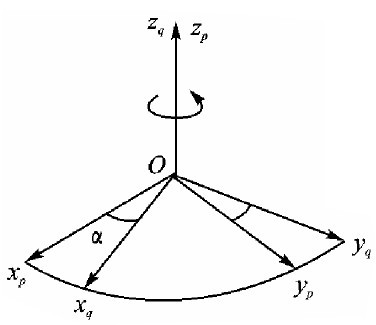
 其中转转矩阵
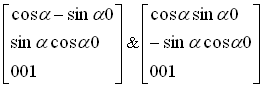
其中转转矩阵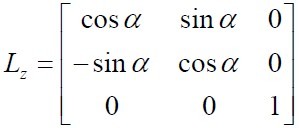
Ps:以下两个矩阵互为逆矩阵。
- 常用坐标系及坐标系之间的变换
- 常用坐标系及坐标系之间的变换
- OpenGL坐标系之间的变换
- 两个坐标系之间变换矩阵的实现
- Android 的坐标系及矩阵变换
- 大地坐标系与SVG DOM屏幕坐标之间的变换
- 坐标变换_世界坐标系与用户坐标系之间的转换
- 坐标系变换
- 坐标系之间的转换
- 详解坐标系及坐标变换--大地坐标系…
- 详解坐标系及坐标变换--大地坐标系…
- 详解坐标系及坐标变换--大地坐标系(一)
- 详解坐标系及坐标变换--大地坐标系(二)
- 国内地图坐标系介绍及常见地图(百度、高德、凯立德)之间的坐标系转换
- 国内地图坐标系介绍及常见地图(百度、高德、凯立德)之间的坐标系转换
- 坐标系之间的旋转平移变换与对应变换矩阵的关系
- 坐标系之间的旋转平移变换与对应变换矩阵的关系
- 坐标系之间的旋转平移变换与对应变换矩阵的关系
- linux-2.6.31/arch/arm/下的故事
- 由二叉树的前序遍历序列和中序遍历序列求后序遍历序列
- Oracle RAC Failover 详解
- jQuery语法
- C#语言的预处理器指令
- 常用坐标系及坐标系之间的变换
- "死表"燃气费引争议 业主称没用气凭啥要收费
- flex安全沙箱,跨域访问图片资源问题解决
- Cocos2d 资料教程
- Linux的快捷键和主要命令
- python处理excel表格
- 来CSDN网站第一天找到的是.......
- 初始化COM类,在FinalConstruct与构造函数中初始化有何区别
- Ubuntu开启ssh服务


