圆心坐标的提取
来源:互联网 发布:两个听亿网络卡盟 编辑:程序博客网 时间:2024/04/29 06:22
圆心提取的本质是从一张含有圆形/椭圆标志物的图片(见下图1,现实图片经各种处理到达这种圆与背景分明的样态)中,选择一定坐标系,提取出各个标志圆的圆心在这个坐标系中的坐标。
因此这个坐标系的选择将是影响最终结果的形式的关键。一般来说选择图像坐标系,以像素为单位。本实验图片的格式是BMP,因此可以按照BMP自身的坐标特点,以图片左下角为坐标原点,向右为X轴,向上为Y轴。当然若想与WINDOWS窗口坐标系一致(以左上角为原点),直接用图片高度减上坐标系的结果就行了。
关于结果的精度是很值得考究的事情。事实上,若考虑到素材图片是相机所拍成像的,某个圆的圆心与坐标原点的距离应该是一个含一定精度的浮点实数。但是计算机图像的结构限定了坐标系只能以像素为单位,因此其可能达到的最高精度只有0. 5像素。在此以上的精度在本素材图像中是没有意义的。因为相机会自动对物理场景(连续)的采样点(离散采样)进行向输出图像的一一映射,形成像素(一个像素只包含一款颜色)。相邻像素的值是非连续(离散)的,注定图像坐标系中每个“值”(坐标)都只能与像素相容。这样,圆心位置也就只能存在于某个像素上或某2个或4个像素之间,因此实际中最高只有0.5的精度。
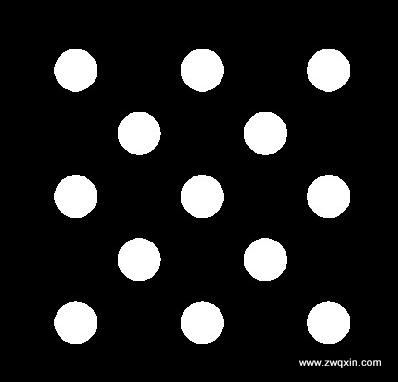
(图1 圆心提取素材图片)
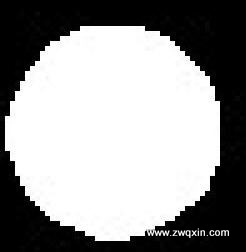
图2 数字图像本质——被离散化采样,导致精度最高仅0.5)
但是,如果圆心不是通过直接寻找的,而是采用数值计算得到(譬如本实验中用到的径向误差判断结合法),那么计算结果就会存在比较高的精度的可能性。这是理论可得结果与实际可得结果的差别。但就“计算机图像”这层意义来说,高于0.5的精度意义不大。
算法的设计:
在分析之后对算法的设计和选择就清晰了——立足于图像的本质上的话,只需要把圆心所在的像素位置找到,或者把包围圆心位置的几个像素找到即可。
参见图2,可知,图像中的参照物为一个圆或椭圆。在把它看作理想的圆/椭圆的话,可以认为圆点必然是在X方向横跨最多像素点的那一行中。因此算法设计上,针对每个圆,首先找出满足这个条件的一行(或几行,取中间行或中间两行),然后在Y方向上找到该像素行的中间位置,即为圆心——综合来说,圆心位置可能是落在某一个像素上,或X方向两个像素之间,或Y方向两个像素之间,或XY方向的4个像素之间。算法必须考虑这几种情况,算出精度为0.5的圆心位置。
算法的实现重点在于怎样分离出一个一个的圆,我采用的是逐像素法,先处理完最开头的一个圆(底部坐标靠近左下角原点),然后把这个圆从图像中去除(对二值化图像,就是把该圆的白色像素变黑),之后再处理下一个圆(寻得条件同样是,底部坐标靠近左下角原点)……直到处理完。怎么判断处理完呢?具体就是当该图像完全黑化的时候停止继续寻觅圆。
圆心坐标用一个容器链表保存起来,作为输出——输出到文件或作为一个/几个白像素涂入被完全黑化的图像上。
该算法为自主设计,自称为逐像素处理。应用条件是:
(1) 图片为二值化黑白图片,8BIT。(可以通过简单的预处理达到)
(2) 图片中仅含圆形。(本实验素材满足,若不满足可进行一定的预处理,如形态学处理,空间模板处理)
上方法另外作出的一个假设:该圆为理想的圆/椭圆。但是从图2这个放大图来说,事实上并不理想——虽然也可满足以上算法能找到圆心。把该圆规范化成一个标准的圆,这样可使找出的圆心具有更高的可信度。
按照某文献资料(图像处理中圆心算法研究 - 雷家勇,达飞鹏,孟广猛,东南大学自动化研究所)中所叙述的方法,可采用“径向误差预处理的最小二乘”进行拟合计算。
算法可分为三部分:
1. 找出初始圆心(此圆心作为径向误差判断的基准,在本实验中可直接取用逐像素处理法所得的结果)。
2. 找出拟合用的像素坐标。首先这些像素必须是圆形的边缘单像素(即八邻域内最多3个像素);然后进行筛选,这主要通过径向误差范围判断,去除无效的边界点和误差大的边界点。
3. 根据上述处理后的边界点,用最小二乘法拟合圆心。
因为经历了数值计算,因此结果将具有高精度,但不一定有意义(见4.1)。本方法结合了“逐像素法找初始圆心”——“径向误差筛选出拟合数据”——“最小二乘法拟合、修正圆心”,得到可信度更高的圆心方位。
该算法(径向误差最小二乘法)的适用条件为:
(1) 处理的图像元素必须是严格的圆或近似圆。如果是椭圆且偏心太厉害的话,全部基于圆的拟合算法会不适用,径向误差方法也变得无效。
(2) 因为采用了逐像素处理,因此也必须满足之前所述该算法的条件。
有此设计的处理结果是:

(图3 程序界面,圆心提取对话框)
(图4 结果)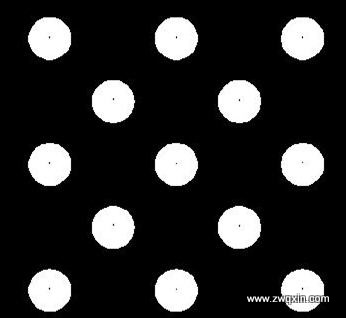
(图5 直观一点)
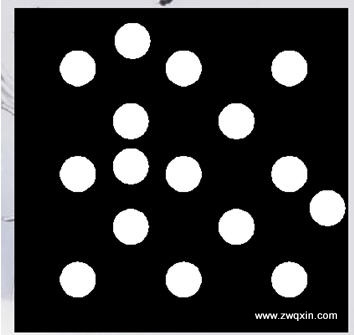
(图6 另一张测试图片)
(图7 处理结果)
最后这里只是说明对于这种杂乱排布的圆也能检测出而已。不过扫描算法里的递归终结条件就得好好掂量了~
程序内嵌进LVideoCapture .ver 1.5里了。(1.0版的功能见[VFW视频捕获之尝试] )在后面的1.8版本,涉及了摄象机标定的功能。
- 圆心坐标的提取
- 圆心坐标的提取
- 霍夫变换提取圆心坐标,并拟合直线
- 求三角形外接圆圆心坐标的算法
- 三角形外接圆圆心坐标
- 空间3点求三点所在空间圆的圆心空间坐标
- 求三维空间中的三角形外接圆圆心坐标的算法
- 已知圆心,半径,角度,求圆上的点坐标
- 已知圆心,半径,角度,求圆上的点坐标。
- 已知圆心,半径,角度,求圆上的点坐标
- 已知圆心,半径,角度,求圆上的点坐标
- 已知圆心、半径、角度,求圆上的点坐标
- 已知圆心,半径,角度,求圆上的点坐标
- 已知圆心,半径,角度,求圆上的点坐标
- 已知圆心,半径,角度,求圆上的点坐标
- 已知圆上三点坐标求圆心
- WPF arcgis中已知圆心坐标和半径,求圆上一点的坐标(当前点的x坐标和圆心相等)
- 使用python 在已知圆弧两个端点和中点坐标 计算圆弧的圆心坐标
- jquery 文本框只能输入数字
- 解决response.write()css失效的问题办法
- 大数相加(两个数相加结果大于int能表示的范围时怎么办?)
- [WPF]显示周的起始时间和结束时间 Text of DatePicker
- Anynote - 个人信息管理系统
- 圆心坐标的提取
- host文件实用应用
- SQL Server 索引中include的魅力(具有包含性列的索引)
- walk in winmine
- 了解DB2数据库中DB2字符串
- Chrome MessageLoop类分析
- 把二元查找树转变成排序的双向链表
- 用GCC输出带源代码的汇编程序进行链接的调试
- ubuntu下gvim配置文件for C/C++


