Nao机器人基于颜色表的足球场地边界识别
来源:互联网 发布:js防水 施工 编辑:程序博客网 时间:2024/04/29 15:49
机器人在足球比赛中,处理信息的速度是决定其比赛效果的一个重要因素。在以视觉为主导的Nao机器人上,对图像处理的快慢将影响整体的效率。在经过学习后发现,利用扫描线对图像进行处理相对于处理整幅图像,这种方法只处理了20%左右的像素。而且通过队水平线(通过计算可以在图像中得出一条线,在这条线的上半部分的图像不用处理)。同时我们还可以将场地的边界标示出来,这样我们就可以只处理足球场地上的那一部分图像。
关于扫描线请参见【文献】 Object recognition from sub-sampled image processing ,该论文对这种方法进行了详细的描述。在接下来的场地边界的标示中,我们首先利用垂直扫描线,扫描线之间的间隔为10见图1 ,标记出连续绿色像素点的个数大于5个的点。那个我们就认为这可能是一个边界点,把这些可能的边界点连接起来,就可以形成我们的边界。但是这里需要考虑一中情况就是,原始的边界被其他目标遮挡住了,例如机器人,球门柱,最糟糕的情况是,我们的重要目标球此时还在球门柱前,如果这时直接连接边界点,那么,一些需要识别的目标将划分到场地外见图2。通过求相邻两个点的斜率来判断是否应该排除这个伪边界点见图3。
说明这其中使用了colorTalbe,把将要判断的颜色先利用颜色表分类,在这个里也就是判断这个像素点是否是绿色,具体细节见源程序。这里还没有考虑到球场的拐角。注colorTable类的程序不再附上,参见之前博客 : 建立颜色表并进行基于颜色的初步分割。
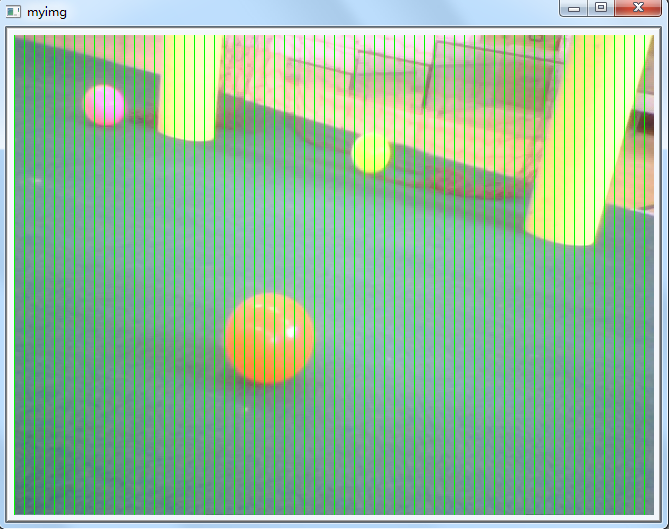
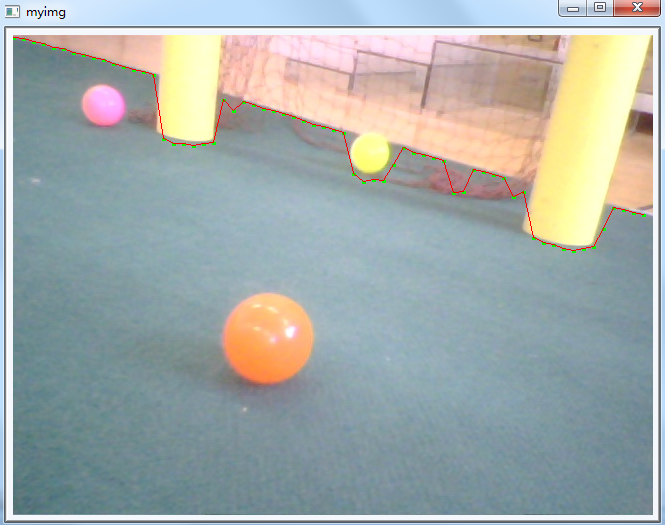

图 1 图 2 图 3
- Nao机器人基于颜色表的足球场地边界识别
- 足球场地预定电话
- 机器人NAO
- NAO机器人的介绍与参数
- 基于 robocup 机器人足球仿真2D的多主体动态不可测问题
- 基于ssm的场地管理系统
- NAO机器人连接网络
- nao机器人使用
- 关于机器人足球的一些东西
- nao机器人学习笔记6:深层开发的环境搭建
- nao机器人动作关节值记录的方法
- 基于颜色分割的盲道识别算法
- 基于颜色特征的图像识别
- 基于Julius的机器人语音识别系统构建
- 【OpenCV】4th-基于YCrCb颜色空间的颜色识别
- 基于色卡的颜色识别和色调识别-基于颜色的图像检索
- nao机器人学习笔记1
- nao机器人学习笔记2
- 第八周 任务二
- android 开发环境搭建
- 程序领空和系统领空
- JVM GC常识
- 如何在Mac的Finder中显示/usr、/tmp、/var等隐藏目录
- Nao机器人基于颜色表的足球场地边界识别
- 第八周 任务四
- 邮件推广如何防止邮件进入垃圾箱的十大法宝
- Single Image Haze Removal(图像去雾)-CVPR’09 Best Paper
- tomcat配置好环境变量,运行出错解决办法
- 【状态压缩DP】函数依赖
- delete this的使用
- python处理xml大文件[xml.sax]
- 杭电hdu 1394 Minimum Inversion Number 线段树练习


