Android模拟器学framework和driver之battery & backlight-----1.battery in linux
来源:互联网 发布:口袋妖怪淘宝魔法师 编辑:程序博客网 时间:2024/05/01 00:01
在linux中battery驱动主要是去处理供电方面的东西,大家看下driver在bsp中的路径就可以知道,android模拟器使用的goldfish内核中battery驱动的位置是:
android/common/drivers/power/goldfish_battery.c
目前手机,平板电脑日益普及,在嵌入式领域battery的续航能力也一直制约着手机等嵌入式设备的发展,iphone比android手机做的好多了,希望android可以再处理上下功夫,赶超apple,废话不多说,这里battery主要是处理,电池供电、插上充电器充电、USB供电等事情的发生,还有就是一些电池的信息管理,比如说电量、温度等状态可以使用户知道。
OK,这边我们主要是使用goldfish中的battery驱动来分析一下linux中的power模块是如何工作的。
在这之前我们首先要来看一下power_supply这个device driver 子系统是如何建立的,这边我们涉及到的代码都在/common/drivers/power/下:
power_supply_core.c
power_supply_sysfs.c
goldfish_battery.c
power_supply_core.c是power_supple subsystem的核心函数,在power_supply子系统在linux启动的时候会先调用到里面的饿init函数:
- static int __init power_supply_class_init(void)
- {
- power_supply_class = class_create(THIS_MODULE, "power_supply");
- if (IS_ERR(power_supply_class))
- return PTR_ERR(power_supply_class);
- power_supply_class->dev_uevent = power_supply_uevent;
- return 0;
- }
- subsys_initcall(power_supply_class_init);
这个函数比较简单首先是在class中创建了一个power_supply的class,启动模拟器后可以看到在sys/class/下会有一个power_supply文件夹生成,然后是
power_supply_class->dev_uevent = power_supply_uevent;这句话把power_supply_uevent挂到power_supply_class的dev_uevent上,这里说明下,就是说power_supply子系统都是使用uevent机制把信息传到user space的,当battery的状态发生改变的时候会向用户空间上报一个uevent,这样的话用户空间就可以知道什么时候去抓信息。
这个power_supply_uevent是个回调函数,被定义在power_supply_sysfs.c中:
- int power_supply_uevent(struct device *dev, struct kobj_uevent_env *env)
- {
- struct power_supply *psy = dev_get_drvdata(dev);
- int ret = 0, j;
- char *prop_buf;
- char *attrname;
- dev_dbg(dev, "uevent\n");
- if (!psy || !psy->dev) {
- dev_dbg(dev, "No power supply yet\n");
- return ret;
- }
- dev_dbg(dev, "POWER_SUPPLY_NAME=%s\n", psy->name);
- ret = add_uevent_var(env, "POWER_SUPPLY_NAME=%s", psy->name);
- if (ret)
- return ret;
- prop_buf = (char *)get_zeroed_page(GFP_KERNEL);
- if (!prop_buf)
- return -ENOMEM;
- for (j = 0; j < ARRAY_SIZE(power_supply_static_attrs); j++) {
- struct device_attribute *attr;
- char *line;
- attr = &power_supply_static_attrs[j];
- ret = power_supply_show_static_attrs(dev, attr, prop_buf);
- if (ret < 0)
- goto out;
- line = strchr(prop_buf, '\n');
- if (line)
- *line = 0;
- attrname = kstruprdup(attr->attr.name, GFP_KERNEL);
- if (!attrname) {
- ret = -ENOMEM;
- goto out;
- }
- dev_dbg(dev, "Static prop %s=%s\n", attrname, prop_buf);
- ret = add_uevent_var(env, "POWER_SUPPLY_%s=%s", attrname, prop_buf);
- kfree(attrname);
- if (ret)
- goto out;
- }
- dev_dbg(dev, "%zd dynamic props\n", psy->num_properties);
- for (j = 0; j < psy->num_properties; j++) {
- struct device_attribute *attr;
- char *line;
- attr = &power_supply_attrs[psy->properties[j]];
- ret = power_supply_show_property(dev, attr, prop_buf);
- if (ret == -ENODEV) {
- /* When a battery is absent, we expect -ENODEV. Don't abort;
- send the uevent with at least the the PRESENT=0 property */
- ret = 0;
- continue;
- }
- if (ret < 0)
- goto out;
- line = strchr(prop_buf, '\n');
- if (line)
- *line = 0;
- attrname = kstruprdup(attr->attr.name, GFP_KERNEL);
- if (!attrname) {
- ret = -ENOMEM;
- goto out;
- }
- dev_dbg(dev, "prop %s=%s\n", attrname, prop_buf);
- ret = add_uevent_var(env, "POWER_SUPPLY_%s=%s", attrname, prop_buf);
- kfree(attrname);
- if (ret)
- goto out;
- }
- out:
- free_page((unsigned long)prop_buf);
- return ret;
- }
稍微有点长,不怕,我们慢慢来分析,这里只是开头,什么都没有应该比较好分析,
我们抓重点,首先是ret = add_uevent_var(env, "POWER_SUPPLY_NAME=%s", psy->name);这句话添加了uevent的一些环境变量,这里添加了POWER_SUPPLY_NAME,接着都是些分配内存的代码,还有就是把power_supply_properties中注册的所有属性都添加成环境变量,这样的话当battery的某个属性发生变化的时候都会通报到上层让用户知道。
这里uevent我不做详细介绍,网上资料也一大堆,后面讲到jni层的时候我也会做补充用户层是如何去开启一个socket来抓kernel中的uevent的。
回到我们的power_supply_core.c中,在linux起来的时候只有调用到core中的class_init函数,其他的函数都是为我们的driver服务的,
现在我们来看下我们的goldfish_battery驱动,打开android/common/drivers/power/goldfish_battery.c,一般我喜欢先看init函数,
- static int __init goldfish_battery_init(void)
- {
- return platform_driver_register(&goldfish_battery_device);
- }
很简单,注册了platform_driver,同学们看到了这个函数第一反应应该是去找device_register函数,以为只有这2个函数匹配了才算在linux系统中注册了platform 设备,那么在哪呢?在我们goldfish的板级文件中有注册device,这边很奇怪,其实我没有找到具体的goldfish-battery的device_register但是在板级文件中有一个pdev_bus的注册
arch/arm/mach-goldfish/pdev_bus.c
- static void goldfish_pdev_worker(struct work_struct *work);
- static uint32_t pdev_bus_base;
- static uint32_t pdev_bus_irq;
- static LIST_HEAD(pdev_bus_new_devices);
- static LIST_HEAD(pdev_bus_registered_devices);
- static LIST_HEAD(pdev_bus_removed_devices);
- static DECLARE_WORK(pdev_bus_worker, goldfish_pdev_worker);
- static void goldfish_pdev_worker(struct work_struct *work)
- {
- int ret;
- struct pdev_bus_dev *pos, *n;
- list_for_each_entry_safe(pos, n, &pdev_bus_removed_devices, list) {
- list_del(&pos->list);
- platform_device_unregister(&pos->pdev);
- kfree(pos);
- }
- list_for_each_entry_safe(pos, n, &pdev_bus_new_devices, list) {
- list_del(&pos->list);
- <span style="color: rgb(255, 0, 0); ">ret = platform_device_register(&pos->pdev);</span>
- if(ret) {
- printk("goldfish_pdev_worker failed to register device, %s\n", pos->pdev.name);
- }
- else {
- printk("goldfish_pdev_worker registered %s\n", pos->pdev.name);
- }
- list_add_tail(&pos->list, &pdev_bus_registered_devices);
- }
- }
可以看下上面这个代码中,在工作队列中遍历所有的pdev链表,调用platform_device_register把设备注册进去,之后就会调用到我们的probe函数了。
---------------------------------------------------------------------------------
probe函数主要还是做一些初始化,probe的意思就是探测的意思,就是试着去初始化(我是这么理解的),
- static int goldfish_battery_probe(struct platform_device *pdev)
- {
- int ret;
- struct resource *r;
- struct goldfish_battery_data *data;
- data = kzalloc(sizeof(*data), GFP_KERNEL);
- if (data == NULL) {
- ret = -ENOMEM;
- goto err_data_alloc_failed;
- }
- spin_lock_init(&data->lock);
- data->battery.properties = goldfish_battery_props;
- data->battery.num_properties = ARRAY_SIZE(goldfish_battery_props);
- data->battery.get_property = goldfish_battery_get_property;
- data->battery.name = "battery";
- data->battery.type = POWER_SUPPLY_TYPE_BATTERY;
- data->ac.properties = goldfish_ac_props;
- data->ac.num_properties = ARRAY_SIZE(goldfish_ac_props);
- data->ac.get_property = goldfish_ac_get_property;
- data->ac.name = "ac";
- data->ac.type = POWER_SUPPLY_TYPE_MAINS;
- r = platform_get_resource(pdev, IORESOURCE_MEM, 0);
- if (r == NULL) {
- printk(KERN_ERR "%s: platform_get_resource failed\n", pdev->name);
- ret = -ENODEV;
- goto err_no_io_base;
- }
- data->reg_base = IO_ADDRESS(r->start - IO_START);
- data->irq = platform_get_irq(pdev, 0);
- if (data->irq < 0) {
- printk(KERN_ERR "%s: platform_get_irq failed\n", pdev->name);
- ret = -ENODEV;
- goto err_no_irq;
- }
- ret = request_irq(data->irq, goldfish_battery_interrupt, IRQF_SHARED, pdev->name, data);
- if (ret)
- goto err_request_irq_failed;
- ret = power_supply_register(&pdev->dev, &data->ac);
- if (ret)
- goto err_ac_failed;
- ret = power_supply_register(&pdev->dev, &data->battery);
- if (ret)
- goto err_battery_failed;
- platform_set_drvdata(pdev, data);
- battery_data = data;
- GOLDFISH_BATTERY_WRITE(data, BATTERY_INT_ENABLE, BATTERY_INT_MASK);
- return 0;
- err_battery_failed:
- power_supply_unregister(&data->ac);
- err_ac_failed:
- free_irq(data->irq, data);
- err_request_irq_failed:
- err_no_irq:
- err_no_io_base:
- kfree(data);
- err_data_alloc_failed:
- return ret;
- }
首先来看几个结构体,其实个人认为,linux驱动给开发人员做的很多就是填充结构体,因为基本框架linux已经实现了,我们要做的是把这个大框架填满,使这个框架有血有肉,这样才能正常工作。
首先是goldfish_battery_data 这个结构体:
- struct goldfish_battery_data {
- uint32_t reg_base;
- int irq;
- spinlock_t lock;
- struct power_supply battery;
- struct power_supply ac;
- };
这个结构体中我们关注的是power_supply这个结构体,别的没什么好说的,中断啊,寄存器地址啊,自旋锁什么的。
- struct power_supply {
- const char *name;
- enum power_supply_type type;
- enum power_supply_property *properties;
- size_t num_properties;
- char **supplied_to;
- size_t num_supplicants;
- int (*get_property)(struct power_supply *psy,
- enum power_supply_property psp,
- union power_supply_propval *val);
- void (*external_power_changed)(struct power_supply *psy);
- /* For APM emulation, think legacy userspace. */
- int use_for_apm;
- /* private */
- struct device *dev;
- struct work_struct changed_work;
- #ifdef CONFIG_LEDS_TRIGGERS
- struct led_trigger *charging_full_trig;
- char *charging_full_trig_name;
- struct led_trigger *charging_trig;
- char *charging_trig_name;
- struct led_trigger *full_trig;
- char *full_trig_name;
- struct led_trigger *online_trig;
- char *online_trig_name;
- #endif
- };
这部分我们对照着probe中的代码一起分析,主要还是填充这个结构体:
- data->battery.properties = goldfish_battery_props;
- data->battery.num_properties = ARRAY_SIZE(goldfish_battery_props);
- data->battery.get_property = goldfish_battery_get_property;
- data->battery.name = "battery";
- data->battery.type = POWER_SUPPLY_TYPE_BATTERY;
首先是对battery的属性信息的填写:
- static enum power_supply_property goldfish_battery_props[] = {
- POWER_SUPPLY_PROP_STATUS,
- POWER_SUPPLY_PROP_HEALTH,
- POWER_SUPPLY_PROP_PRESENT,
- POWER_SUPPLY_PROP_TECHNOLOGY,
- POWER_SUPPLY_PROP_CAPACITY,
- };
这边电池的信息由status health present等,我们比较关注的还是电池的电量,capacity,
然后是属性的数目,不多说了,下面第三个参数比较重要 data->battery.get_property = goldfish_battery_get_property;
- static int goldfish_battery_get_property(struct power_supply *psy,
- enum power_supply_property psp,
- union power_supply_propval *val)
- {
- struct goldfish_battery_data *data = container_of(psy,
- struct goldfish_battery_data, battery);
- int ret = 0;
- switch (psp) {
- case POWER_SUPPLY_PROP_STATUS:
- //modify charge to discharge
- //val->intval = GOLDFISH_BATTERY_READ(data, BATTERY_STATUS);
- val->intval = POWER_SUPPLY_STATUS_DISCHARGING;
- //-----modify end
- break;
- case POWER_SUPPLY_PROP_HEALTH:
- val->intval = GOLDFISH_BATTERY_READ(data, BATTERY_HEALTH);
- break;
- case POWER_SUPPLY_PROP_PRESENT:
- val->intval = GOLDFISH_BATTERY_READ(data, BATTERY_PRESENT);
- break;
- case POWER_SUPPLY_PROP_TECHNOLOGY:
- val->intval = POWER_SUPPLY_TECHNOLOGY_LION;
- break;
- case POWER_SUPPLY_PROP_CAPACITY:
- //modify capacity from 50 per to 20 per by Jay
- //val->intval = GOLDFISH_BATTERY_READ(data, BATTERY_CAPACITY);
- val->intval = global_brightness;
- //----modify end
- break;
- default:
- ret = -EINVAL;
- break;
- }
- return ret;
- }
驱动中就是通过这个函数去实时得到电池的信息,然后使用uevent传到user space,我们重点讲下这个函数是怎么工作的。
大家注意到这里这个函数的参数,struct power_supply *psy,
enum power_supply_property psp,
union power_supply_propval *val
第一个参数是我们最重要的data struct,第二个参数是属性的类型,选择我们要得到的属性,第三个参数就是这个属性的值是多少,比如说电池电量是百分之多少。
这个函数是被挂在power_supply结构体中的get_property上的,它是在哪被回调呢?我们先在这里打个问号,我们知道这里只是在一些结构体中填充好了我们battery的信息,至于在什么时候回调,什么时候使用,什么时候上传uevent,我们后面会讲到,留意下!!
继续回到probe函数,下面是
- data->battery.name = "battery";
- data->battery.type = POWER_SUPPLY_TYPE_BATTERY;
名字和类型的填写。
下面就是跟硬件相关的东西了,一般的device是会用中断的方法去触发,这里goldfish的内核使用的是PC的中断资源。
- data->irq = platform_get_irq(pdev, 0);
- if (data->irq < 0) {
- printk(KERN_ERR "%s: platform_get_irq failed\n", pdev->name);
- ret = -ENODEV;
- goto err_no_irq;
- }
- ret = request_irq(data->irq, goldfish_battery_interrupt, IRQF_SHARED, pdev->name, data);
得到中断好,然后申请中断,挂好中断触发的函数,这里发生中断后会做一系列的事情,我们也先放一下,先来看看下面的power_supply注册函数:
- ret = power_supply_register(&pdev->dev, &data->ac);
- if (ret)
- goto err_ac_failed;
- ret = power_supply_register(&pdev->dev, &data->battery);
- if (ret)
- goto err_battery_failed;
- platform_set_drvdata(pdev, data);
- battery_data = data;
power_supply_register函数在power_supply_core中被定义
- int power_supply_register(struct device *parent, struct power_supply *psy)
- {
- int rc = 0;
- psy->dev = device_create(power_supply_class, parent, 0, psy,
- "%s", psy->name);
- if (IS_ERR(psy->dev)) {
- rc = PTR_ERR(psy->dev);
- goto dev_create_failed;
- }
- INIT_WORK(&psy->changed_work, power_supply_changed_work);
- rc = power_supply_create_attrs(psy);
- if (rc)
- goto create_attrs_failed;
- rc = power_supply_create_triggers(psy);
- if (rc)
- goto create_triggers_failed;
- power_supply_changed(psy);
- goto success;
- create_triggers_failed:
- power_supply_remove_attrs(psy);
- create_attrs_failed:
- device_unregister(psy->dev);
- dev_create_failed:
- success:
- return rc;
- }
首先是时候device_create函数在class下创建设备驱动,传入的第一个参数就是我们的power_supply class
然后是初始化了工作队列INIT_WORK(&psy->changed_work, power_supply_changed_work);
oK,我们来看下这个工作队列的回调函数,power_supply_changed_work
- static void power_supply_changed_work(struct work_struct *work)
- {
- struct power_supply *psy = container_of(work, struct power_supply,
- changed_work);
- dev_dbg(psy->dev, "%s\n", __func__);
- class_for_each_device(power_supply_class, NULL, psy,
- __power_supply_changed_work);
- power_supply_update_leds(psy);
- kobject_uevent(&psy->dev->kobj, KOBJ_CHANGE);
- }
这里就是调用了2个函数,第一个 class_for_each_device(power_supply_class, NULL, psy,
__power_supply_changed_work);
它遍历了我们power_supply_class上的所有节点,用psy作为参数调用了__power_supply_changed_work函数,__power_supply_changed_work函数的作用是匹配我们的驱动
- static int __power_supply_changed_work(struct device *dev, void *data)
- {
- struct power_supply *psy = (struct power_supply *)data;
- struct power_supply *pst = dev_get_drvdata(dev);
- int i;
- for (i = 0; i < psy->num_supplicants; i++)
- if (!strcmp(psy->supplied_to[i], pst->name)) {
- if (pst->external_power_changed)
- pst->external_power_changed(pst);
- }
- return 0;
- }
之后再调用到了我们最最最最关键的地方kobject_uevent(&psy->dev->kobj, KOBJ_CHANGE);这里就是注册了kobject uevent事件,当我们的属性发生变化的时候会把uevent传给用户空间。
所以说,调用到我们的工作队列的时候就会向用户空间上报event,这个动作被封装在
- void power_supply_changed(struct power_supply *psy)
- {
- dev_dbg(psy->dev, "%s\n", __func__);
- schedule_work(&psy->changed_work);
- }
之后会被使用到。
回到我们的power_supply_register函数中
rc = power_supply_create_attrs(psy);被定义在power_supply_sysfs.c中
- int power_supply_create_attrs(struct power_supply *psy)
- {
- int rc = 0;
- int i, j;
- for (i = 0; i < ARRAY_SIZE(power_supply_static_attrs); i++) {
- rc = device_create_file(psy->dev,
- &power_supply_static_attrs[i]);
- if (rc)
- goto statics_failed;
- }
- for (j = 0; j < psy->num_properties; j++) {
- rc = device_create_file(psy->dev,
- &power_supply_attrs[psy->properties[j]]);
- if (rc)
- goto dynamics_failed;
- }
- goto succeed;
- dynamics_failed:
- while (j--)
- device_remove_file(psy->dev,
- &power_supply_attrs[psy->properties[j]]);
- statics_failed:
- while (i--)
- device_remove_file(psy->dev, &power_supply_static_attrs[i]);
- succeed:
- return rc;
- }
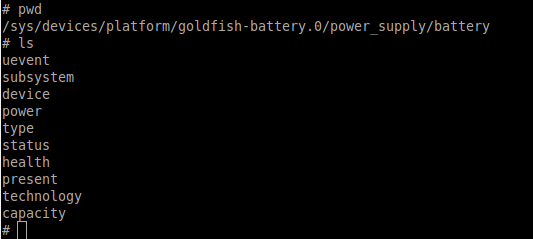
这边遍历了我们的属性数组,把每个属性在我们的驱动中声称文件系统,调用到device_create_flie函数,我们运行模拟器在power_supply/battery/下会发现我们填进去的属性值生成的所有文件。
这里介绍完毕,回到我们的goldfish驱动文件,最后就是我们的中断函数了。
- static irqreturn_t goldfish_battery_interrupt(int irq, void *dev_id)
- {
- unsigned long irq_flags;
- struct goldfish_battery_data *data = dev_id;
- uint32_t status;
- spin_lock_irqsave(&data->lock, irq_flags);
- /* read status flags, which will clear the interrupt */
- status = GOLDFISH_BATTERY_READ(data, BATTERY_INT_STATUS);
- status &= BATTERY_INT_MASK;
- if (status & BATTERY_STATUS_CHANGED)
- power_supply_changed(&data->battery);
- if (status & AC_STATUS_CHANGED)
- power_supply_changed(&data->ac);
- spin_unlock_irqrestore(&data->lock, irq_flags);
- return status ? IRQ_HANDLED : IRQ_NONE;
- }
这里我什么也不看只想看一句话
- if (status & BATTERY_STATUS_CHANGED)
- power_supply_changed(&data->battery);
- if (status & AC_STATUS_CHANGED)
- power_supply_changed(&data->ac);
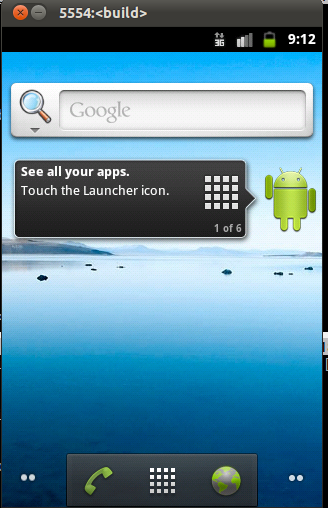
之前讲过,就是power_supply_changed函数触发了向用户空间上报event事件的代码。OK ,android goldfish battery驱动就讲到这边,我看android模拟器的电池老是动啊动的很是不爽所以我在get_property函数中充电状态改成了不是充电状态,然后把电池电量设置为恒定的,嘿嘿,这样的话就不会动了,哈哈。下面贴张图,有图有真相
- Android模拟器学framework和driver之battery & backlight-----1.battery in linux
- Android模拟器学framework和driver之battery & backlight-----1.battery in linux
- Android模拟器学framework和driver之battery & backlight-----1.battery in linux
- Android模拟器学framework和driver之battery & backlight-----5. backlight in linux
- Android模拟器学framework和driver之battery & backlight-----5. backlight in linux
- Android模拟器学framework和driver之battery & backlight-----5. backlight in linux
- Android模拟器学framework和driver之battery & backlight-----5. backlight in linux .
- Android模拟器学framework和driver之battery & backlight-----5. backlight in linux .
- Android模拟器学framework和driver之battery & backlight-----3. battery in framework
- Android模拟器学framework和driver之battery & backlight-----3. battery in framework
- Android模拟器学framework和driver之battery & backlight-----3. battery in framework
- Android模拟器学framework和driver之battery & backlight-----2. battery in jni
- Android模拟器学framework和driver之battery & backlight-----2. battery in jni
- Android模拟器学framework和driver之battery & backlight-----2. battery in jni
- Android模拟器学framework和driver之battery & backlight-----8. backlight in framework
- Android模拟器学framework和driver之battery & backlight-----8. backlight in framework
- Android模拟器学framework和driver之battery & backlight-----8. backlight in framework .
- Android模拟器学framework和driver之battery & backlight-----6. backlight in hal
- WS_EX_CONTROLPARENT Allows the user to navigate among the child windows of the window by using the
- android布局文件中各属性所代表的意义
- 黑马程序员_O‘Reilly java nio学习笔记之缓冲区1
- 关于快捷键
- 复选框翻页记录
- Android模拟器学framework和driver之battery & backlight-----1.battery in linux
- Linux 下查找大文件或目录,邮件的日志太大的处理方式
- 一个简单的NT驱动之创建设备对象函数(CreateDevice)
- Android学习路线
- 两篇很牛的vim使用技巧
- 关于响应事件
- gdb 常用命令
- mfs-1.6.11故障一例
- 利用Eclipse打包混淆时报:Conversion to Dalvik format failed with error 1


