Window XP驱动开发(十七) 芯片固件程序设计 (代码实现,针对USB2.0 芯片CY7C68013A)
来源:互联网 发布:mac dota2 国服 编辑:程序博客网 时间:2024/05/21 17:36
转载请标明是引用于 http://blog.csdn.net/chenyujing1234
欢迎大家拍砖!
在我的文章:<< http://blog.csdn.net/chenyujing1234/article/details/7604266 >>
中介绍了USB2.0 芯片CY7C68013A+FPGA实现的高速传输系统设计(软件及硬件),里面讲到
一、固件的修改
修改是基于CYPRESS官方提供的固件工程Bulkloop基础上。(获得方法参考http://blog.csdn.net/chenyujing1234/article/details/7622901)
1、修改VID、PID
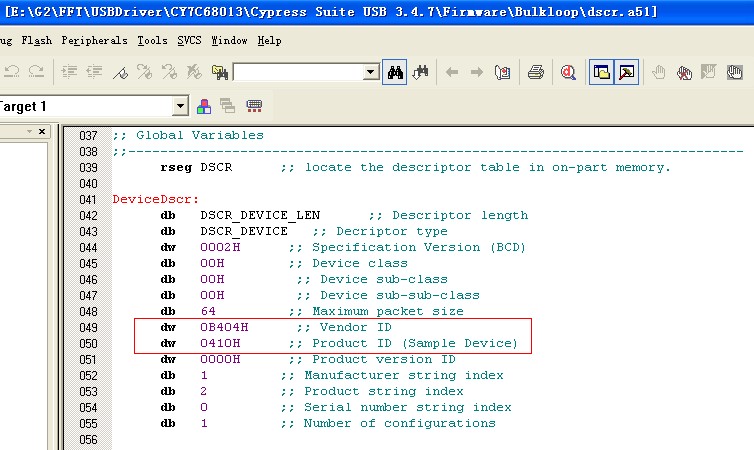
1、1 修改hex文件中的VID与PID
在固件工程下的dscr.a51文件中修改。
1、2 修改EEPROM中的VID、PID
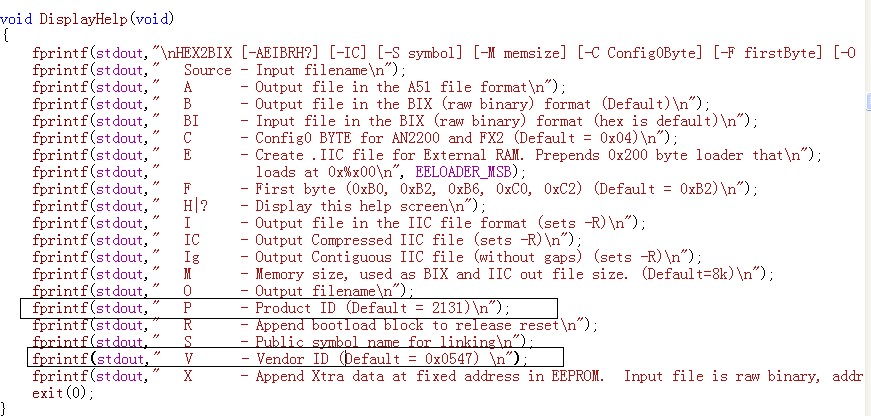
Hex2bix.exe(具体源码自己查看http://download.csdn.net/detail/chenyujing1234/4423966)把hex文件转为iic文件时加入了VID与PID。
其中IIC_Hdr结构体中存放默认的VID、PID: IIC_HDR IIC_Hdr = { 0xB2, 0x0547, 0x2131, 0x0000, 0x04, 0x00 };(VID: 4750 PID: 3121)
解释VID、PID高低字节反掉的原因:
在 x86 系统中,低位地址存放的是低位字节,高位地址存放的是高位字节。比如一个short 型的变量0x0102,内存中存放位置是02 01,02 在低地址,01 在高地址。
USB总线上的传输顺序是先低地址,再高地址,也就是02 01。到达 FX2 后的接收顺序是从低地址到高地址顺序存储,这样02 在低地址,01 在高地址。
而 8051 的变量是低地址存放的是高位字节,高地址存放的是低位字节,这样02 01 所表示的变量就变成了0x0201 的unsigned short型的变量。
下面是Hex2bix.exe的部分源码:
case FT_IIC: { switch (IIC_Hdr.prom_type) { case 0xB0: // EZ-USB case 0xB2: fwrite(&IIC_Hdr,7,1,file); // Write type, VID, PID, DID (7 bytes)bytes = 7; break; case 0xB4: // EZ-USB FX case 0xB6: fwrite(&IIC_Hdr,9,1,file); // Write type, VID, PID, DID, Config (9 bytes)bytes = 9; break; case 0xC0: // EZ-USB FX2 case 0xC2: fwrite(&IIC_Hdr,8,1,file); // Write type, VID, PID, DID, Config (8 bytes)bytes = 8; break; default: Error(ERR_UNRECOGNIZED_FIRSTBYTE); } }
当然此结构体中的VID、PID字段可以通过Hex2bix.exe 的命令行指定。
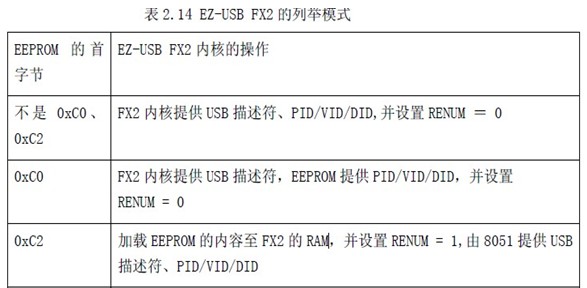
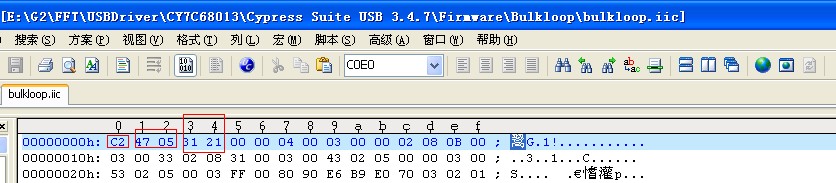
根据CY7C68中的要求,我们会在iic文件中的第一个字节中放C2 ,第二三放VID,第四五放PID
得到的iic文件头如下:
2、设计成Slave FIFO模式。
根据 <<http://blog.csdn.net/chenyujing1234/article/details/7604266>>对我的系统的设计,把CY7C68配置成Slave FIFO模式。
2、1 配置端点
根据与FPGA的约定我决定只使用两个端点:
把端点2配置成OUT,BULK类型;把端点6配置成IN,BULK类型。
在固件工程中的dscr.a51中定义了两种类型的配置描述符:HighSpeedConfigDscr和FullSpeedConfigDscr。(两种类型的设备类似,这里只以HighSpeedConfigDscr为例)
每种类型都含有两种节点: 接口描述、端点描述
(1)因为我们只用到端点2和端点6两个端点,把以我们把接口描述中的Number of end points设置为2。
;; Interface Descriptor db DSCR_INTRFC_LEN ;; Descriptor length db DSCR_INTRFC ;; Descriptor type db 0 ;; Zero-based index of this interface db 0 ;; Alternate setting db 2 ;; Number of end points db 0ffH ;; Interface class db 00H ;; Interface sub class db 00H ;; Interface sub sub class db 0 ;; Interface descriptor string index
(2)然后再修改端点
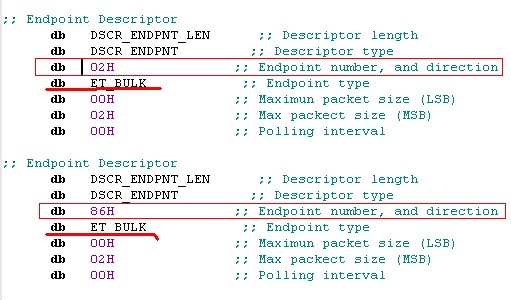
解释上图:
db 02H: 2表示是端点2,0表示是OUT方向;
db 86H: 6表示是端点6,8表示是INT方向。
2、2 修改void TD_Init(void)函数
void TD_Init(void) // Called once at startup{ CPUCS = 0x10;// 0001 0000// BitValueRegister Function// bit.70reserved// bit.60reserved// bit.50PORTCSTBPortC access generates /RD & /WR strobes// bit.4:310CLKSPD[1:0]00 : 12M Hz (Default)//01 : 24M Hz//10 : 48M Hz//11 : Reserved// bit.20CLKINV0 : CLKOUT signal not inverted//1 : CLKOUT signal inverted// bit.10CLKOE0 : CLKOUT pin floats//1 : CLKOUT pin driven// bit.00reservedIFCONFIG = 0x43;// 0100 0011// BitValueRegister Function// bit.70IFCLKSRC0 : External clock on the IFCLK pin//1 : Internal 30 or 48MHz (default)// bit.613048MHZ0 : 30M Hz//1 : 48M Hz// bit.50IFCLKOE0 : Tri-state//1 : Drive// bit.40IFCLKOL0 : clock not inverted//1 : clock is inverted// bit.30ASYNC0 : FIFO/GPIF operate synchronously//1 : FIFO/GPIF operate asynchronously// bit.40GSTATE1 : GPIF states, Port E Alternate Functions.// PE0 GSTATE[0]// PE1 GSTATE[1]// PE2 GSTATE[2]// bit.1:011IFCFG[1:0]00 : Ports//01 : Reserved//10 : GPIF Interface (internal master)//11 : Slave FIFO Interface(external master)SYNCDELAY;EP6CFG = 0xE8;// 1110 1000, (Size = 1024, buf = Quad (Buf x4), BULK)// BitValueRegister Function// bit.71VALID0 : Does not respond to any USB traffic.//1 : Activate an endpoint(default)// bit.61DIR0 : OUT//1 : IN// bit.5:410TYPE[1:0]0 : Invalid//01 : ISOCHRONOUS//10 : BULK (default)//11 : INTERRUPT// bit.31SIZE0 : 512 bytes//1 : 1024 bytes// bit.20reserved// bit.1:00BUF[1:0]00 : Quad//01 : Invalid//10 : Double//11 : TripleSYNCDELAY;EP4CFG = 0x7F;SYNCDELAY;// EP4 not validEP2CFG = 0x7F;SYNCDELAY;// EP2 not validEP8CFG = 0x7F;SYNCDELAY;// EP8 not validFIFORESET = 0x80;// activate NAK-ALL to avoid race conditionsSYNCDELAY;// see TRM section 15.14FIFORESET = 0x02;SYNCDELAY;// reset, FIFO 2FIFORESET = 0x04;SYNCDELAY;// reset, FIFO 4FIFORESET = 0x06;SYNCDELAY;// reset, FIFO 6FIFORESET = 0x08;SYNCDELAY;// reset, FIFO 8FIFORESET = 0x00;SYNCDELAY;// deactivate NAK-ALLPINFLAGSAB = 0x00;SYNCDELAY;// FLAGA - fixed EP2EF, FLAGB - fixed EP4EFPINFLAGSCD = 0x00;SYNCDELAY;// FLAGC - fixed EP6FF, FLAGD - fixed EP8FFPORTACFG |= 0x80;SYNCDELAY;// FLAGD, set alt. func. of PA7 pin (alt. func.=alternate functions)FIFOPINPOLAR = 0x00;SYNCDELAY;// all signals active lowEP6FIFOCFG = 0x0C;SYNCDELAY;// AUTOIN=1, ZEROLENIN=1, WORDWIDE=0}2、3 修改void TD_Init(void)Bug(Time:2012-07-28):
2、3、1、Bug描述
从端点6可以读到FPGA送过来的数据,可是我写到端点2的数据FPGA却收不到;调试现象为:
第一次写端点2是成功的,第二次写就失败了。
2、3、2、解决方法分析
一开始以为是FPGA读时序有问题,可是FPGA工程师坚信没有问题;
后来从网上 http://bbs.ednchina.com/BLOG_ARTICLE_192827.HTM 得到启发,是因为没有对PINFLAGSAB、PINFLAGSCD进行配置。
(1)当autoout=1时,主机和外部设备直接连接,68013的8051失效,此时外部设备是master,也就是说读写时序要有外部设备产 生,你不能向68013写数据是不可能的,原则上说你至少可以写两个512的数据进去,然后就写不下去了,我验证过了确实是这样。
(2)如果你没有专门的设定相关寄存器,所有的标志默认的都是低有效的,所以应该是0是full,1是not full!
(3)FLAGB is EP2EF , FLAGA is EP2FF
FLAGD is EP6EF, FLAGC is EP6FF
2、3、3、解决方法
void TD_Init(void) // Called once at startup{ // set the CPU clock to 48MHz CPUCS = ((CPUCS & ~bmCLKSPD) | bmCLKSPD1) ; // set the slave FIFO interface to 48MHz // IFCONFIG |= 0x40; IFCONFIG = 0x43;// 0100 0011 // Registers which require a synchronization delay, see section 15.14 // FIFORESET FIFOPINPOLAR // INPKTEND OUTPKTEND // EPxBCH:L REVCTL // GPIFTCB3 GPIFTCB2 // GPIFTCB1 GPIFTCB0 // EPxFIFOPFH:L EPxAUTOINLENH:L // EPxFIFOCFG EPxGPIFFLGSEL // PINFLAGSxx EPxFIFOIRQ // EPxFIFOIE GPIFIRQ // GPIFIE GPIFADRH:L // UDMACRCH:L EPxGPIFTRIG // GPIFTRIG // Note: The pre-REVE EPxGPIFTCH/L register are affected, as well... // ...these have been replaced by GPIFTC[B3:B0] registers // default: all endpoints have their VALID bit set // default: TYPE1 = 1 and TYPE0 = 0 --> BULK // default: EP2 and EP4 DIR bits are 0 (OUT direction) // default: EP6 and EP8 DIR bits are 1 (IN direction) // default: EP2, EP4, EP6, and EP8 are double buffered // we are just using the default values, yes this is not necessary... EP1OUTCFG = 0xA0;// 10100000 EP1INCFG = 0xA0; // 10100000 SYNCDELAY; // see TRM section 15.14 EP2CFG = 0xA2; // 1010 0010 SYNCDELAY; // chenyujing //EP4CFG = 0xA0; EP4CFG = 0xA0; SYNCDELAY; EP6CFG = 0xE2; // 1110 0010 SYNCDELAY; EP8CFG = 0xE0;// 1110 1000, (Size = 1024, buf = Quad (Buf x4), BULK) // BitValueRegister Function// bit.71VALID0 : Does not respond to any USB traffic.//1 : Activate an endpoint(default)// bit.61DIR0 : OUT//1 : IN// bit.5:410TYPE[1:0]0 : Invalid//01 : ISOCHRONOUS//10 : BULK (default)//11 : INTERRUPT// bit.31SIZE0 : 512 bytes//1 : 1024 bytes// bit.20reserved// bit.1:00BUF[1:0]00 : Quad//01 : Invalid//10 : Double//11 : Triple PINFLAGSAB = 0x8c; // defines FLAGA as prog-level flag, pointed to by FIFOADR[1:0] SYNCDELAY; // FLAGB as full flag, as pointed to by FIFOADR[1:0] PINFLAGSCD = 0xae; // FLAGC as empty flag, as pointed to by FIFOADR[1:0] PORTACFG = 0x80; // used PA7/FLAGD as a port pin, not as a FIFO flag FIFOPINPOLAR = 0x00; // set all slave FIFO interface pins as active low // out endpoints do not come up armed EP2FIFOCFG = 0x15;SYNCDELAY;// 0001 0101 AUTOOUT=1, ZEROLENIN=1, WORDWIDE=1 EP6FIFOCFG = 0x0D;SYNCDELAY;// 0000 1101 AUTOIN=1, ZEROLENIN=1, WORDWIDE=1 //bit.7 0 //bit.6 INFM1 //bit.5 OEP1 //bit.4 AUTOOUT //bit.3 AUTOIN //bit.2 ZEROLENIN //bit.1 0 //bit.0 WORDWIDE // since the defaults are double buffered we must write dummy byte counts twice SYNCDELAY; EP2BCL = 0x80; // arm EP2OUT by writing byte count w/skip. SYNCDELAY; EP2BCL = 0x80; SYNCDELAY; //EP4BCL = 0x80; // arm EP4OUT by writing byte count w/skip. //SYNCDELAY; //EP4BCL = 0x80; //SYNCDELAY; EP6BCL = 0x80; // arm EP4OUT by writing byte count w/skip. SYNCDELAY; EP6BCL = 0x80; SYNCDELAY; FIFORESET = 0x80; // reset all FIFOs SYNCDELAY; FIFORESET = 0x02; SYNCDELAY; FIFORESET = 0x04; SYNCDELAY; FIFORESET = 0x06; SYNCDELAY; FIFORESET = 0x08; SYNCDELAY; FIFORESET = 0x00; // enable dual autopointer feature AUTOPTRSETUP |= 0x01;}
二、测试固件方法
测试就是去读取FPGA写入的数据,但怎么判断FPAG工程师的代码使写入是有效呢?
为了在与FPGA工程师为为什么端点时没数据而争执时,能让FPGA工程师心服口服地知道是自己的问题,我们应该知道在Slave FIFO模式下的写时序图。
1、FPGA端的设计
在开发技术手册上有:
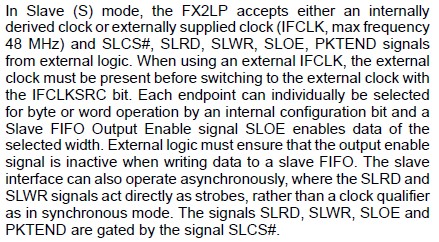
翻译成中文是:
(1)FX2LP接收内部或外部的时钟(IFCLK最大为48MHz);
(2)SLCS#、SLRD、SLWR、SLOE、PKTENT信号作为外部的逻辑;
(3)当用外部时钟时,外部时钟必须在用IFCLKSRC bit转化到外部时钟时表现出来;
(4)每个端点能有byte或word两种方式可选,可通过内部的配置bit来配置;SLOE信号使能被选择的数据;
(5)外部的控制逻辑要保证在写数据到一个slave FIFO时,output enable 信号是不可用的。
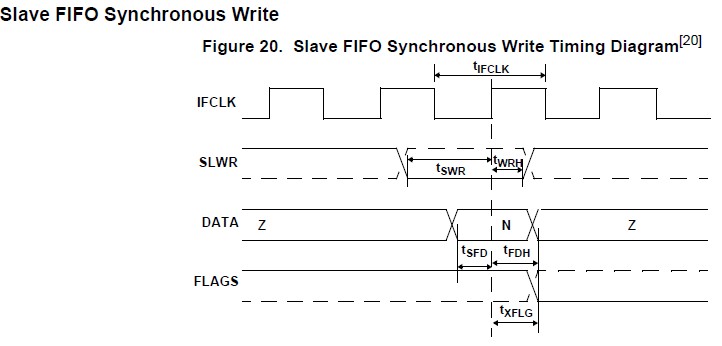
3、1 Slave FIFO 同步写
写时序图:
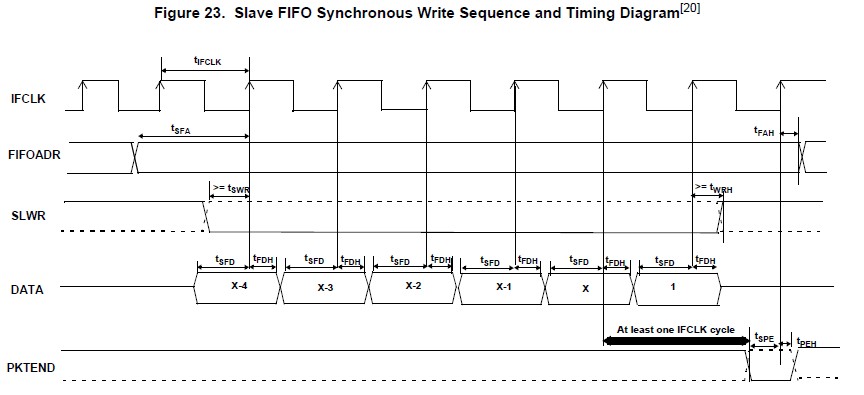
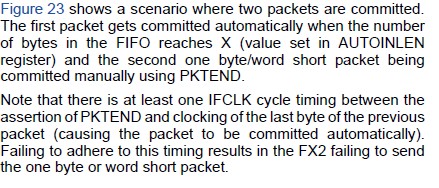
包结束触发时序图:
PKTEND能把最后的数据值按时钟输入到FIFOs.
(1)虽然PKTEND的断言没有特殊的要求,但是那里有一个特殊的拐角的条件要满足。
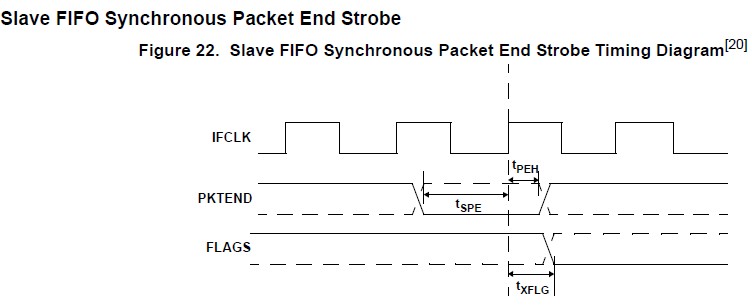
(2)当FIFO被配置成自动模式时,有一个增加的时序要求需要被满足,此时它被要求连续地发送两个包:
一个满包(满被定义作为满足AUTOENLEN寄存器中设置的级别的比特数)被自动提交,随在它后面的是一个short one byte或word包(它们是用PKTEND手动提交的)。
在这种场景中,用户必须确保在最后byte或word被输入到之前的自动提交包后的上升沿后断言PKTEND至少一个时钟周期。
下图表示的就是这样应用场景,其中X表示在IN端点被配置成自动模式时AUTOINLEN寄存器被设置的值。
3、2 Slave FIFO 同步读
- Window XP驱动开发(十七) 芯片固件程序设计 (代码实现,针对USB2.0 芯片CY7C68013A)
- Window XP驱动开发(十七) 芯片固件程序设计 (代码实现,针对USB2.0 芯片CY7C68013A)
- Window XP驱动开发(十三) 芯片功能驱动端 (代码实现,针对USB2.0 芯片CY7C68013A)
- Window XP驱动开发(十四) 驱动应用程序端代码实现(针对USB2.0 芯片CY7C68013A,基于CyAPI.lib与Bulkloop固件)
- Window XP驱动开发(十一) USB2.0 芯片CY7C68013A+FPGA实现的高速传输系统设计(软件及硬件)
- Window XP驱动开发(十一) USB2.0 芯片CY7C68013A+FPGA实现的高速传输系统设计(软件及硬件)
- Window XP驱动开发(十一) USB2.0 芯片CY7C68013A+FPGA实现的高速传输系统设计(软件及硬件)
- Window XP驱动开发(十七) CY7C68013A GPIF的配置
- 基于USB2.0的视频图像处理芯片实现方案
- CY7C68013 USB2.0芯片调试总结
- ASoC驱动开发 之 Codec芯片ALC5677 驱动代码分析
- PCF8563 时钟芯片驱动代码
- 利用USB2.0接口的芯片CY7C68013和单片机实现全数字图像的实时采集
- 关于Cypress公司USB芯片FX2的固件开发
- 基于ISP1581芯片的USB2.0接口设计
- 基于ISP1581芯片的USB2.0接口设计
- 基于ISP1581芯片的USB2.0接口设计
- 基于ISP1581芯片的USB2.0接口设计
- 实现关机注销重启函数
- tcpdump移植
- 黑马程序员—.NET基础—01
- 大端模式和小端模式
- 使用python中的urlretrieve下批量下载数据
- Window XP驱动开发(十七) 芯片固件程序设计 (代码实现,针对USB2.0 芯片CY7C68013A)
- 基于微软Dryad分布式并行计算平台云技术的研究
- 生成xml与获取xml
- MongoDB数据库(一)
- Android 软件自动更新 (网络XML解析、以及本地xml软件版本两种解析方式)
- 四元数
- linux 库的编译方法
- 【学习点滴-数据结构-栈&队列】 用两个栈模拟一个队列
- 一步一步走进块驱动之第二章


