混流轮毂自动识别与中心定位算法
来源:互联网 发布:言语理解怎么提高 知乎 编辑:程序博客网 时间:2024/04/28 16:47
来源:http://blog.csdn.net/lezhiyong
流程:采集图像→图像滤波增强→图像分割→特征提取→特征分类
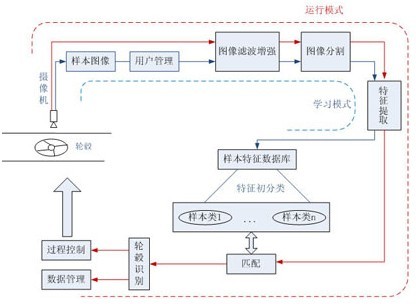
学习模式:采集样品轮毂图像、获取样本特征参数并写入样品轮毂特征数据库中。
运行模式:对混流轮毂进行识别和检测,并发送识别结果和控制信号。
常用的中心求取方法可以分为基于灰度和基于边缘的两大类。基于灰度的方法一般利用目标的灰度分布信息,如质心法、曲面拟合法等。基于边缘的方法一般利用目标的边缘形状信息,这些方法有边缘圆(椭圆)拟合、Hough变换等。另外还有正交扫描法,圆周投影法等,一般而言,基于灰度的方法比较适用于较小的且灰度分布均匀的目标,而基于边缘的方法则适合较大的目标,它对灰度的分布不太敏感。考虑到系统工作的环境有可能收到光线或背景的干扰,使按照单纯依靠上述算法提取出来的轮毂中心的精度不够。根据不同的轮毂图像二值化质量分别采用圆拟合法或质心法定位中心,最后优化中心点位置,即使应用在轮毂图像质量比较差的识别中,搜索中心点的精确度还是比较满意。
最小二乘法拟合法求取目标轮廓中心的基本原理是先对目标所有边缘点拟合出综合圆心和半径,利用这个综合圆心和半径对这些边缘点进行检查,去掉太远和太近的点,把剩下的边缘点再进行“最小二乘法”拟合,进行2-3次迭代后,可得到圆心位置的精确值以及圆弧半径。最小二乘拟合算法在充分考虑了各边界点的影响前提下,不要求严格通过所有边缘点,而追求整体误差最小,具有整体精度较高,测量精度稳定的优点。但它的缺点也十分明显,即抗干扰性能差,当存在随机噪声时中心运算精度会明显降低;当干扰强度较大时所得圆心甚至可能明显错误。
在轮毂识别的实际工作环境中,由于不良光源或不良背景的干扰,提取的轮毂外轮廓弧形往往被干扰,对于被遮挡情况下,得出的外轮廓更加复杂。试验表明如果直接用最小二乘迭代拟合这些存在部分区域失真的边缘,最后得出的圆心位置与实际圆心偏差比较大或偏离甚远。
由于本文所描述的产品外径规格在14-21英寸间,即轮毂的外轮廓的曲率在一定的范围间,而且合格轮毂的外缘呈标准圆形。所以用曲率作为一个约束条件,将外轮廓点序列中不合该条件的点删除,经过这样的数据预处理后,滤掉了轮廓噪声点的影响,将筛选出的点集进行最小二乘迭代拟合。
- 混流轮毂自动识别与中心定位算法
- IOS定位与坐标系算法
- python数据分析与挖掘学习笔记(7)-交通路标自动识别实战与神经网络算法
- CRUSH:可控、可扩展的复本数据非中心化的定位算法
- 关于安卓无线定位与定位算法的讨论
- arcgis api for flex开发Query查询定位与中心定位查询功能 弹出定制提示框
- 高德地图心得(一)—定位与移动(Maker处于地图中心)
- SIFT算法:KeyPoint找寻、定位与优化
- WI-FI定位算法原理与介绍
- 验证码自动识别的价值与意义
- 循环展示,中心算法
- 垂直中心扭曲算法
- 中心点画圆算法
- Weiszfeld 算法求中位中心
- 定位算法
- 定位算法
- css文档流与定位
- (转)GPS定位数据压缩算法的设计与实现
- 海量的jQuery插件帖,很经典
- http 传输原理及格式
- 面向对象编程——继承和多态
- 接口和委托的区别在那里?
- linux下各个文加件作用
- 混流轮毂自动识别与中心定位算法
- data/data/目录下的私有数据
- Java与Flex学习笔记(13)----Flex中解析地址栏传递的参数
- POJ 3727 Newton’s Method
- C#输入输出重定向
- 母函数
- 用python做爬虫爬图片。
- pid_t 定义
- C语言程序判断计算机的CPU大小端


