OpenCV轮廓检测
来源:互联网 发布:淘宝乔丹正品店推荐 编辑:程序博客网 时间:2024/05/13 11:23
最近再次用到了opencv轮廓,在这里结合作者冰山一角的博客(http://www.cnblogs.com/slysky/)以及自己的体会在此稍加说明。其程序主要参见冰山一角的Blog,遗憾的是代码是OpenCV1.0写的,等有时间再用2.4.2改写一篇。
轮廓的特性
轮廓的特性有很多,下面一一介绍。
1.轮廓的多边形逼近
轮廓的多边形逼近指的是:使用多边形来近似表示一个轮廓。
多边形逼近的目的是为了减少轮廓的顶点数目。
多边形逼近的结果依然是一个轮廓,只是这个轮廓相对要粗旷一些。
可以使用方法cvApproxPoly()
2.轮廓的关键点
轮廓的关键点是:轮廓上包含曲线信息比较多的点。关键点是轮廓顶点的子集。
可以使用cvFindDominantPoints函数来获取轮廓上的关键点,该函数返回的结果一个包含 关键点在轮廓顶点中索引 的序列。再次强调:是索引,不是具体的点。如果要得到关键点的具体坐标,可以用索引到轮廓上去找。
3.轮廓的周长和面积
轮廓的周长可以用cvContourPerimeter或者cvArcLength函数来获取。
轮廓的面积可以用cvContourArea函数来获取。
4.轮廓的边界框
有三种常见的边界框:矩形、圆形、椭圆。
(1)矩形:在图像处理系统中提供了一种叫Rectangle的矩形,不过它只能表达边垂直或水平的特例;OpenCv中还有一种叫Box的矩形,它跟数学上的矩形一致,只要4个角是直角即可。
如果要获取轮廓的Rectangle,可以使用cvBoundingRect函数。
如果要获取轮廓的Box,可以使用cvMinAreaRect2函数。
(2)圆形
如果要获取轮廓的圆形边界框,可以使用cvMinEnclosingCircle函数。
(3)椭圆
如果要获取轮廓的椭圆边界框,可以使用cvFitEllipse2函数。
5.轮廓的矩
矩是通过对轮廓上所有点进行积分运算(或者认为是求和运算)而得到的一个粗略特征。
在连续情况下,图像函数为![]() f(x,y),那么图像的p+q阶几何矩(标准矩)定义为:
f(x,y),那么图像的p+q阶几何矩(标准矩)定义为:
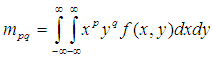 p ,q = 0,1,2……
p ,q = 0,1,2……
p+q阶中心距定义为:
 p,q = 0,1,2……
p,q = 0,1,2……
其中 和
和 代表图像的重心,
代表图像的重心,
 ,
,
对于离散的数字图像,采用求和号代替积分:
 ,
, ,p,q = 0,1,2 ……
,p,q = 0,1,2 ……
N和M分别是图像的高度和宽度;
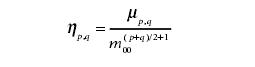
归一化的中心距定义为: ;其中
;其中
在公式中,p对应x维度上的矩,q对应y维度上的矩,阶数表示对应的部分的指数。该计算是对轮廓界上所有像素(数目为n)进行求和。如果p和q全部为0,那么m00实际上对应轮廓边界上点的数目。
虽然可以直接计算出轮廓的矩,但是经常会用到归一化的矩(因此不同大小但是形状相同的物体会有相同的值)。同样,简单的矩依赖于所选坐标系,这意味着物体旋转后就无法正确匹配。
于是就产生了Hu矩以及其他归一化矩的函数。
Hu矩是归一化中心矩的线性组合。之所以这样做是为了能够获取代表图像某个特征的矩函数。这些矩函数对缩放,旋转和镜像映射出了(h1)具有不变性。
Hu矩是从中心矩中计算得到。即七个由归一化中心矩组合成的矩:
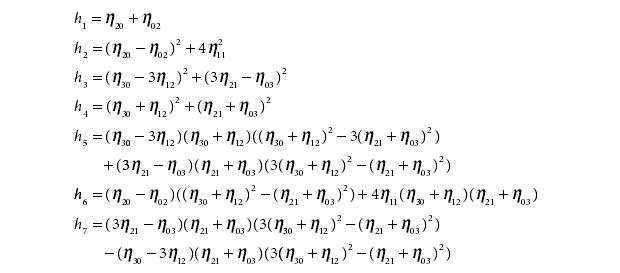
其中中心矩和归一化中心矩的定义为:

我们可以使用cvContoursMoments函数、cvMoments函数方便的得到轮廓的矩集,然后再相应的方法或函数获取各种矩。
特定的矩:cvGetSpatialMoment函数
中心矩:cvGetCentralMoment函数
归一化中心矩:cvGetNormalizedCentralMoment函数
Hu矩:cvGetHuMoments函数
6.轮廓的轮廓树
轮廓树用来描述某个特定轮廓的内部特征。注意:轮廓树跟轮廓是一一对应的关系;轮廓树不用于描述多个轮廓之间的层次关系。
轮廓树的创建过程:
从一个轮廓创建一个轮廓树是从底端(叶子节点)到顶端(根节点)的。首先搜索三角形突出或者凹陷的形状的周边(轮廓上的每一个点都不是完全和它的相邻点共线的)每个这样的三角形被一条线段代替,这条线段通过连接非相邻点的两点得到;因此实际上三角形或者被削平或者被填满。每个这样的替换都把轮廓的顶点减少,并且给轮廓树创建一个新节点。如果这样的一个三角形的两侧有原始边,那么她就是得到的轮廓树的叶子;如果一侧已是一个三角形,那么它就是那个三角形的父节点。这个过程的迭代最终把物体的外形简称一个四边形,这个四边形也被剖开;得到的两个三角形是根节点的两个子节点。
结果的二分树最终将原始轮廓的形状性比编码。每个节点被它所对应的三角形的信息所注释。
这样建立的轮廓树并不太鲁棒,因为轮廓上小的改变也可能会彻底改变结果的树,同时最初的三角形是任意选取的。为了得到较好的描述需要首先使用函数cvApproxPoly()之后将轮廓排列(运用循环移动)成最初的三角形不怎么收到旋转影响的状态。
可以用函数cvCreateContourTree来构造轮廓树。
7.轮廓的凸包和凸缺陷
轮廓的凸包和凸缺陷用于描述物体的外形。凸包和凸缺陷很容易获得,不过我目前不知道它们到底怎么使用。
如果要判断轮廓是否是凸的,可以用cvCheckContourConvexity函数。
如果要获取轮廓的凸包,可以用cvConvexHull2函数,返回的是包含顶点的序列。
如果要获取轮廓的凸缺陷,可以用cvConvexityDefects函数。
8.轮廓的成对几何直方图
成对几何直方图(pairwise geometrical histogram PGH)是链码编码直方图(chain code histogram CCH)的一个扩展或者延伸。CCH是一种直方图,用来统计一个轮廓的Freeman链码编码每一种走法的数字。这种直方图的一个优良性质为当物体旋转45度,那么新直方图是老直方图的循环平移。这样就可以不受旋转影响。
(1)轮廓保存的是一系列的顶点,轮廓是由一系列线段组成的多边形。对于看起来光滑的轮廓(例如圆),只是线段条数比较多,线段长度比较短而已。实际上,电脑中显示的任何曲线都由线段组成。
(2)每两条线段之间都有一定的关系,包括它们(或者它们的延长线)之间的夹角,两条线段的夹角范围是:(0,180)。
(3)每两条线段上的点之间还有距离关系,包括最短(小)距离、最远(大)距离,以及平均距离。最大距离我用了一个偷懒的计算方法,我把轮廓外界矩形的对角线长度看作了最大距离。
(4)成对几何直方图所用的统计数据包括了夹角和距离。
轮廓的匹配
如果要比较两个物体,可供选择的特征很多。如果要判断某个人的性别,可以根据他(她)头发的长短来判断,这很直观,在长发男稀有的年代准确率也很高。也可以根据这个人尿尿的射程来判断,如果射程大于0.50米,则是男性。总之,方法很多,不一而足。
我们在上文中得到了轮廓的这么多特征,它们也可以用于进行匹配。典型的轮廓匹配方法有:Hu矩匹配、轮廓树匹配、成对几何直方图匹配。
1.Hu矩匹配
轮廓的Hu矩对包括缩放、旋转和镜像映射在内的变化具有不变性。cvMatchShapes函数可以很方便的实现对2个轮廓间的匹配。
2.轮廓树匹配
用树的形式比较两个轮廓。cvMatchContourTrees函数实现了轮廓树的对比。
3.成对几何直方图匹配
在得到轮廓的成对几何直方图之后,可以使用直方图对比的方法来进行匹配。
- OpenCV 轮廓检测
- OpenCV轮廓检测
- OpenCV轮廓检测
- OpenCV轮廓检测
- OpenCV 轮廓检测
- Opencv轮廓检测
- Opencv 轮廓检测 直线
- OpenCV 轮廓检测
- OpenCV 矩形轮廓检测
- OpenCV 闭合轮廓检测
- OpenCV 轮廓检测
- Opencv轮廓查找检测
- OpenCV检测图像轮廓
- python-opencv-轮廓检测
- OpenCV之轮廓检测
- Python-OpenCV轮廓检测
- OpenCV例子学习轮廓检测
- opencv笔记6----轮廓检测
- 校验18位身份证号是否是有效的身份证号
- unity 3d 多开
- Android获取已安装App的所有权限
- KK算法论文中的fig2
- 汉诺塔
- OpenCV轮廓检测
- wordpress文件代码分析
- sqlBUlkCopy用法4
- 算法导论-14-2-Josephus排列
- SqlBulkCopy从记事本批量复制数据4
- 和百度音乐差不多的音乐引擎
- 46.windbg-条件断点(windbg script)
- Android ScrollView回弹效果(一)修改版
- 雅虎新推出的CSS框架Pure


