游戏开发中的人工智能——追逐和闪躲
来源:互联网 发布:淘宝上1元包邮赚钱吗 编辑:程序博客网 时间:2024/05/09 18:20
转载至 阅读笔记-游戏开发中的人工智能-第2章-追逐和闪躲
1. 追逐/闪躲的组成
完整追逐/闪躲由三部分组成:
·作出追或逃的决策判断(在后文谈论到状态机和神经网络时,再讨论)
·开始追或逃(本章重点)
·避开障碍物(第五章和第六章,再讨论)
2. 基本追逐和闪躲
假设:追逐者坐标(predatorX, predatorY),闪躲者坐标(preyX,preyY)
连续环境的基本追逐代码
if(predatorX > preyX) predatorX--;else if(predatorX < preyX) predatorX++if(predatorY > preyY) predatorY--; else if(predatorY < preyY) predatorY++
连续环境的基本闪躲代码
if(preyX > predatorX) preyX++;else if(preyX < predatorX) preyX--;if(preyY > predatorY) preyY++; else if(preyY < predatorY) preyY--;
砖块环境的基本追逐/闪躲代码与连续环境的十分类似,这里忽略。
3. 视线追逐
3.1 砖块环境中,为什么要视线追逐
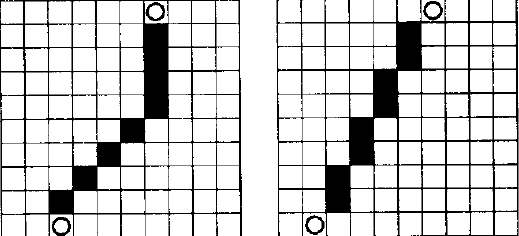
图-砖块环境中的简单追逐和视线追逐
左边的是简单追逐的图像,右边的是视线追逐的图像。
简单追逐算出来的肯定是最短的路径,但是不一定能够求得视觉上的直线,而直线追逐在视觉上会好很多。
另外,如果有一群攻击者往玩家处聚拢时,简单追逐会使得,在以目标为远点的坐标系中,他们沿着对角线走到距离最近的坐标轴,然后再沿着该坐标轴走向目标。这样就相当于让他们排成一个纵队发起攻击。更加合理的做法是,分别从不同方向向目标逼近。
3.2 砖块环境中,如何实现视线追逐
书中使用的是所谓的Bresenham(布雷森汉姆直线算法)算法,该算法是在图素环境中画线最有效的方法之一。最原始的Bresenham需要除法计算斜率,但是简化版本的Bresenham,利用乘法避免了减法的应用。
首先,Bresenham确实是比较好的算法,因为它能够保证整条路径的近似在一条直线上。而不简单的是把两种步子均匀化,可以说Breseham更具有大局观。
Bresenham的算法参见其中讲的很好,只是注意其中关键的d-1的部分,其实是因为向右上方移动了,y坐标加1,所以需要减1。把其中的公式乘以Dx,就能得到不需要除法的推导过程了。
3.2 连续环境中的视线追逐
这一小节讨论的连续环境中的视线追逐是最简单的追逐算法,不过考虑了追逐者得移动不仅有线速度,还有角速度。算法思路就是,首先根据角速度把方向转到视线方向,然后向目标追过去。这一节中的更多的是介绍全局坐标系统和局部坐标系统。

图-坐标系统
局部坐标系统怎么构造呢,即局部构造系统的x轴,y轴方向怎么确定的呢。其实就是认为追逐者当前的移动方向是y轴的正方向(当前追逐者静止咋办呢?这个还不知道),x轴正方向是y轴正方向逆时针旋转90度得到。坐标转化关键是那个夹角。根据上面的公式,把追逐者的全局坐标(X',Y')和局部坐标(0,0)带入,就能算出来夹角的余弦和正弦值了。实际上,使用局部坐标系,是因为有现成的函数可以帮助坐标进行坐标系转化,而坐标转化后,使用起来更加方便了。从下面代码中也能发现,即在判断向左转还是向右转的时候,只需要判断视线向量的x坐标的正负即可,当然这里的方便性与前面局部坐标转化的参数有很大关系即-Predator.fOrientation,具体的还不清楚,没接触过VRotate2D这个函数。
void DoLineOfSightChase(void){ Vector u,v; // u追逐者向量,v猎物向量 bool left = false; // 是否需要向左转 bool right = false; // 是否需要向右转 u = VRotate2D(-Predator.fOrientation, Prey.vPosition-Predator.vPosition) // 视线在局部坐标系中的向量 u.Normalize(); // 归一划 if(u.x < -_TOL) // 判断转动的方向 left = true; else if(u.x > _TOL) right = true; Predator.SetThrusters(left, right); // 转动}
4. 拦截
拦截算法的基本原理是能够预测猎物未来的位置,然后直接到那个位置去,是其能和猎物同时到达同一位置。为了找出追击者和猎物能同时到达的点,不仅要考虑他们的移动方向,还要考虑他们的速度。其实很简单,首先预测追击者追到猎物的最短时间,即,靠拢时间=相对位移/相对速度,如果追击者不能改变方向的话,靠拢时间可能不存在,比如相对位移与相对速度方向相反,这就永远都不可能靠拢,这一小节的最后对这种情况进行了简单说明。有了靠拢时间,就能根据猎物的速度和初始位移,预测到其在靠拢时间后的位置,这样追击者只有根据这个位置,采用前面的视线法追击这个位置就好了。
这个拦截算法对吗?感觉还是有问题,根据书中说法,猎物和追逐者的速度向量和位移向量都是固定的,因为靠拢时间的计算,需要相对位移和相对速度。但是如果这些都是固定的话,很容易得到两者很可能不会相遇的问题。更近合理的解释应该是猎物的速度向量和初始位置向量固定,追逐者的初始位置和速度大小固定,而速度方向不固定,这样通过调整方向来达到拦截的作用。计算可以采用靠拢时间的方法,不过是一个方程。
5. 总结
这一章给出的还是一些基础方法,第5章还会说明利用势函数进行追逐或闪躲。
6. 实践
附件中是我自己实现的砖块环境中的视线追逐,其中有三个算法可选,第一个是基本方法,第二个是bresenham方法,第三个是用除法和取模运算视线的方法。后两种方法在一些情况下很很相似,当然也有不同的,个人感觉还是bresenham更好一些,毕竟有理论支持。
砖块环境中的追逐演示程序:http://files.cnblogs.com/pangxiaodong/chasing.swf
程序截图:
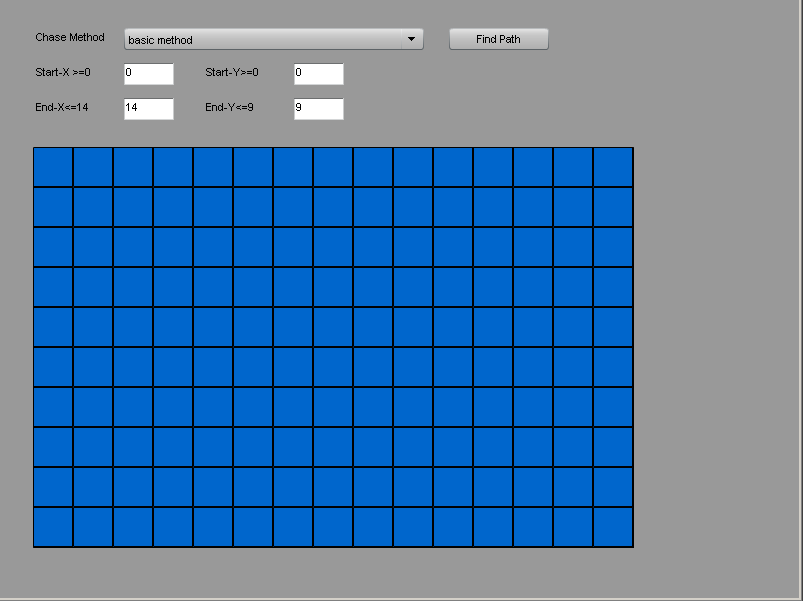
图-砖块环境中的视线追逐演示
- 游戏开发中的人工智能——追逐和闪躲
- 游戏开发中的人工智能(二):追逐和闪躲
- 阅读笔记-游戏开发中的人工智能-第2章-追逐和闪躲
- AI 读书笔记:第二章:追逐和闪躲 关于视线追逐
- 游戏开发中的人工智能——有限状态机和神经网络
- 游戏开发中的人工智能——群聚
- 游戏开发中的人工智能——移动模式
- 游戏开发中的人工智能——A*路径寻找算法
- 游戏人工智能演示(1)追逐
- 游戏人工智能演示(1)追逐
- 游戏人工智能演示(1)追逐
- 游戏开发中的人工智能 复习
- 游戏开发中的人工智能(一):游戏人工智能简介
- 游戏开发中的人工智能——以势函数实现移动
- 游戏开发中的人工智能——基本路径寻找及航点应用
- 游戏开发中的人工智能——A*路径寻找算法(二)
- <游戏开发中的人工智能> -- 阅读笔记
- 游戏开发中的人工智能(四):群聚
- 浅谈C中的malloc和free
- 软件开发中遇到的25个问题
- P2P三种模式的分化和实质
- 一个字符串中可能包含a~z中的多个字符,如有重复,求出现次数最多的那个字母及次数,如有多个重复最多的则都输出。
- 卡牌游戏战斗系统的设计和实现(一)
- 游戏开发中的人工智能——追逐和闪躲
- linux netbeans 7.3.1 使用 笔记
- c的堆栈,内存分配
- nyoj 105 九的余数
- jQuery模拟JS警告、确认、提示弹出对话框效果
- POJ 2155 Matrix 二维线段树
- HDU 3117Fibonacci Numbers(求斐波那契前四位与后四位 数论知识+矩阵快速幂)
- Struts2 标签库讲解
- 一次迭代式开发的研究9:从容应对需求变更


