Linux驱动子系统之I2C(3)
来源:互联网 发布:js发送get请求 编辑:程序博客网 时间:2024/05/15 08:58
3 i2c-dev
3.1 概述
之前在介绍I2C子系统时,提到过使用i2c-dev.c文件在应用程序中实现我们的I2C从设备驱动。不过,它实现的是一个虚拟,临时的i2c_client,随着设备文件的打开而产生,并随着设备文件的关闭而撤销。I2c-dev.c针对每个I2C适配器生成一个主设备号为89的设备文件,实现了i2c_driver的成员函数以及文件操作接口,所以i2c-dev.c的主题是”i2c_driver成员函数+字符设备驱动”。
3.2 i2c-dev.c源码分析
初始化模块
- static int __init i2c_dev_init(void)
- {
- res= register_chrdev(I2C_MAJOR, "i2c", &i2cdev_fops);
- i2c_dev_class= class_create(THIS_MODULE, "i2c-dev");
- /*Keep track of adapters which will be added or removed later */
- res= bus_register_notifier(&i2c_bus_type, &i2cdev_notifier);
- /*绑定已经存在的适配器 */
- i2c_for_each_dev(NULL,i2cdev_attach_adapter);
- }
static int __init i2c_dev_init(void){ res= register_chrdev(I2C_MAJOR, "i2c", &i2cdev_fops); i2c_dev_class= class_create(THIS_MODULE, "i2c-dev"); /*Keep track of adapters which will be added or removed later */ res= bus_register_notifier(&i2c_bus_type, &i2cdev_notifier); /*绑定已经存在的适配器 */ i2c_for_each_dev(NULL,i2cdev_attach_adapter);}I2c-dev初始化函数主要做了注册名为”i2c”的字符设备文件和”i2c-dev”的类
i2cdev_read和i2cdev_write
I2c-dev.c中实现的i2cdev_read和i2cdev_write函数不具有太强的通用性,只适合下面这种单开始信号情况:

而不适合多开始信号的情况:

所以我们经常会使用i2cdev_ioctl函数的I2C_RDWR,在分析i2cdev_ioctl函数之前,我们需要了解一个结构体:
- /* This is the structure as used in theI2C_RDWR ioctl call */
- struct i2c_rdwr_ioctl_data {
- structi2c_msg __user *msgs; /* pointersto i2c_msgs */
- __u32nmsgs; /* number ofi2c_msgs */
- };
/* This is the structure as used in theI2C_RDWR ioctl call */struct i2c_rdwr_ioctl_data { structi2c_msg __user *msgs; /* pointersto i2c_msgs */ __u32nmsgs; /* number ofi2c_msgs */};Msgs 表示单个开始信号传递的数据;
Nmsgs 表示有多少个msgs,比如上图,单开始信号时,nmsgs等于1;多开始信号时,nmsgs等于2
- struct i2c_msg {
- __u16addr; /* slave address */
- __u16flags; /* 默认为写入 */
- #define I2C_M_TEN 0x0010 /*this is a ten bit chip address */
- #define I2C_M_RD 0x0001 /* read data,from slave to master */
- #define I2C_M_NOSTART 0x4000 /* if I2C_FUNC_PROTOCOL_MANGLING */
- #define I2C_M_REV_DIR_ADDR 0x2000 /*if I2C_FUNC_PROTOCOL_MANGLING */
- #define I2C_M_IGNORE_NAK 0x1000 /*if I2C_FUNC_PROTOCOL_MANGLING */
- #define I2C_M_NO_RD_ACK 0x0800 /* if I2C_FUNC_PROTOCOL_MANGLING */
- #define I2C_M_RECV_LEN 0x0400 /* length will be first received byte */
- __u16len; /* msg length */
- __u8*buf; /* pointer to msgdata */
- };
struct i2c_msg { __u16addr; /* slave address */ __u16flags; /* 默认为写入 */#define I2C_M_TEN 0x0010 /*this is a ten bit chip address */#define I2C_M_RD 0x0001 /* read data,from slave to master */#define I2C_M_NOSTART 0x4000 /* if I2C_FUNC_PROTOCOL_MANGLING */#define I2C_M_REV_DIR_ADDR 0x2000 /*if I2C_FUNC_PROTOCOL_MANGLING */#define I2C_M_IGNORE_NAK 0x1000 /*if I2C_FUNC_PROTOCOL_MANGLING */#define I2C_M_NO_RD_ACK 0x0800 /* if I2C_FUNC_PROTOCOL_MANGLING */#define I2C_M_RECV_LEN 0x0400 /* length will be first received byte */ __u16len; /* msg length */ __u8*buf; /* pointer to msgdata */};使用i2cdev_ioctl函数的I2C_RDWR指令会调用到i2cdev_ioctl_rdrw函数:
- static noinline inti2cdev_ioctl_rdrw(struct i2c_client *client,
- unsignedlong arg)
- {
- structi2c_rdwr_ioctl_data rdwr_arg;
- structi2c_msg *rdwr_pa;
- u8__user **data_ptrs;
- inti, res;
- if(copy_from_user(&rdwr_arg,
- (struct i2c_rdwr_ioctl_data __user *)arg,
- sizeof(rdwr_arg)))
- return-EFAULT;
- if(rdwr_arg.nmsgs > I2C_RDRW_IOCTL_MAX_MSGS)
- return-EINVAL;
- rdwr_pa= kmalloc(rdwr_arg.nmsgs * sizeof(struct i2c_msg), GFP_KERNEL);
- if(copy_from_user(rdwr_pa, rdwr_arg.msgs,
- rdwr_arg.nmsgs * sizeof(struct i2c_msg))) {
- kfree(rdwr_pa);
- return-EFAULT;
- }
- res= i2c_transfer(client->adapter, rdwr_pa, rdwr_arg.nmsgs);
- while(i-- > 0) {
- if(res >= 0 && (rdwr_pa[i].flags & I2C_M_RD)) {
- if(copy_to_user(data_ptrs[i], rdwr_pa[i].buf,
- rdwr_pa[i].len))
- res= -EFAULT;
- }
- kfree(rdwr_pa[i].buf);
- }
- }
static noinline inti2cdev_ioctl_rdrw(struct i2c_client *client, unsignedlong arg){ structi2c_rdwr_ioctl_data rdwr_arg; structi2c_msg *rdwr_pa; u8__user **data_ptrs; inti, res; if(copy_from_user(&rdwr_arg, (struct i2c_rdwr_ioctl_data __user *)arg, sizeof(rdwr_arg))) return-EFAULT; if(rdwr_arg.nmsgs > I2C_RDRW_IOCTL_MAX_MSGS) return-EINVAL; rdwr_pa= kmalloc(rdwr_arg.nmsgs * sizeof(struct i2c_msg), GFP_KERNEL); if(copy_from_user(rdwr_pa, rdwr_arg.msgs, rdwr_arg.nmsgs * sizeof(struct i2c_msg))) { kfree(rdwr_pa); return-EFAULT; } res= i2c_transfer(client->adapter, rdwr_pa, rdwr_arg.nmsgs); while(i-- > 0) { if(res >= 0 && (rdwr_pa[i].flags & I2C_M_RD)) { if(copy_to_user(data_ptrs[i], rdwr_pa[i].buf, rdwr_pa[i].len)) res= -EFAULT; } kfree(rdwr_pa[i].buf); }}咋一看,还挺复杂,其实主要做了一件事情:把用户空间传递过来的i2c_rdwr_ioctl_data数据进行错误检查,然后调用i2c_transfer函数与适配器进行通信,如果是接收数据,代码会将访问到的数据传回i2c_rdwr_ioctl_data的buf中。I2c_transfer最终会调用到I2C适配器具体实现的master_xfer函数来与硬件进行通信。
3.3 eeprom实例
预备知识
使用的mini2440开发板,eeprom的地址为0x50,实验完成一个数据的读写,先看下读写时序
AT24C08任意地址字节写的时序:
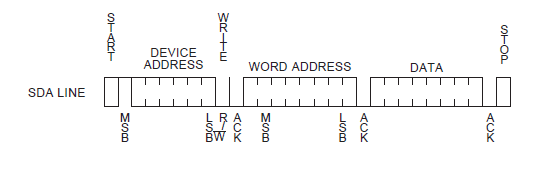
AT24C08任意地址字节写的时序:

下面的代码可以按照上面的两个图来阅读:
- #include <stdio.h>
- #include <linux/types.h>
- #include <fcntl.h>
- #include <unistd.h>
- #include <stdlib.h>
- #include <sys/types.h>
- #include <sys/ioctl.h>
- #include <errno.h>
- #include <assert.h>
- #include <string.h>
- #include <linux/i2c.h>
- #include <linux/i2c-dev.h>
- int main()
- {
- intfd, ret;
- unsignedchar rdwr_addr = 0x42; /* e2prom 读写地址 */
- unsignedchar device_addr = 0x50; /* e2prom 设备地址 */
- unsignedchar data = 0x12; /* 向e2prom写的数据 */
- structi2c_rdwr_ioctl_data e2prom_data;
- fd= open("/dev/i2c/0", O_RDWR);
- if(fd < 0) {
- perror("openerror");
- exit(1);
- }
- e2prom_data.msgs= (struct i2c_msg *)malloc(e2prom_data.nmsgs * \
- sizeof(structi2c_msg));
- if(e2prom_data.msgs == NULL) {
- perror("mallocerror");
- exit(1);
- }
- ioctl(fd,I2C_TIMEOUT, 1); /* 设置超时 */
- ioctl(fd,I2C_RETRIES, 2); /* 设置重试次数 */
- /*向e2prom的rdwr_addr地址写入数据data*/
- e2prom_data.nmsgs= 1;
- e2prom_data.msgs[0].len= 2;
- e2prom_data.msgs[0].addr= device_addr;
- e2prom_data.msgs[0].flags= 0; /* write */
- e2prom_data.msgs[0].buf= (unsigned char *)malloc(2);
- e2prom_data.msgs[0].buf[0]= rdwr_addr; /* write address */
- e2prom_data.msgs[0].buf[1]= data; /* write data */
- ret= ioctl(fd, I2C_RDWR, (unsigned long)&e2prom_data);
- if(ret < 0) {
- perror("writedata error");
- exit(1);
- }
- printf("writedata: %d to address: %#x\n", data, rdwr_addr);
- data= 0; /* be zero*/
- /*从e2prom的rdwr_addr地址读取数据存入buf*/
- e2prom_data.nmsgs= 2;
- e2prom_data.msgs[0].len= 1;
- e2prom_data.msgs[0].addr= device_addr;
- // e2prom_data.msgs[0].flags= 0; /* write */
- e2prom_data.msgs[0].buf= &rdwr_addr;
- e2prom_data.msgs[1].len= 1;
- e2prom_data.msgs[1].addr= device_addr;
- e2prom_data.msgs[1].flags= 1; /* read */
- e2prom_data.msgs[1].buf= &data;
- ret= ioctl(fd, I2C_RDWR, (unsigned long)&e2prom_data);
- if(ret < 0) {
- perror("readerror");
- exit(1);
- }
- printf("read data: %d from address: %#x\n", data,rdwr_addr);
- free(e2prom_data.msgs);
- close(fd);
- return0;
- }
#include <stdio.h>#include <linux/types.h>#include <fcntl.h>#include <unistd.h>#include <stdlib.h>#include <sys/types.h>#include <sys/ioctl.h>#include <errno.h>#include <assert.h>#include <string.h>#include <linux/i2c.h>#include <linux/i2c-dev.h> int main(){ intfd, ret; unsignedchar rdwr_addr = 0x42; /* e2prom 读写地址 */ unsignedchar device_addr = 0x50; /* e2prom 设备地址 */ unsignedchar data = 0x12; /* 向e2prom写的数据 */ structi2c_rdwr_ioctl_data e2prom_data; fd= open("/dev/i2c/0", O_RDWR); if(fd < 0) { perror("openerror"); exit(1); } e2prom_data.msgs= (struct i2c_msg *)malloc(e2prom_data.nmsgs * \ sizeof(structi2c_msg)); if(e2prom_data.msgs == NULL) { perror("mallocerror"); exit(1); } ioctl(fd,I2C_TIMEOUT, 1); /* 设置超时 */ ioctl(fd,I2C_RETRIES, 2); /* 设置重试次数 */ /*向e2prom的rdwr_addr地址写入数据data*/ e2prom_data.nmsgs= 1; e2prom_data.msgs[0].len= 2; e2prom_data.msgs[0].addr= device_addr; e2prom_data.msgs[0].flags= 0; /* write */ e2prom_data.msgs[0].buf= (unsigned char *)malloc(2); e2prom_data.msgs[0].buf[0]= rdwr_addr; /* write address */ e2prom_data.msgs[0].buf[1]= data; /* write data */ ret= ioctl(fd, I2C_RDWR, (unsigned long)&e2prom_data); if(ret < 0) { perror("writedata error"); exit(1); } printf("writedata: %d to address: %#x\n", data, rdwr_addr); data= 0; /* be zero*/ /*从e2prom的rdwr_addr地址读取数据存入buf*/ e2prom_data.nmsgs= 2; e2prom_data.msgs[0].len= 1; e2prom_data.msgs[0].addr= device_addr;// e2prom_data.msgs[0].flags= 0; /* write */ e2prom_data.msgs[0].buf= &rdwr_addr; e2prom_data.msgs[1].len= 1; e2prom_data.msgs[1].addr= device_addr; e2prom_data.msgs[1].flags= 1; /* read */ e2prom_data.msgs[1].buf= &data; ret= ioctl(fd, I2C_RDWR, (unsigned long)&e2prom_data); if(ret < 0) { perror("readerror"); exit(1); } printf("read data: %d from address: %#x\n", data,rdwr_addr); free(e2prom_data.msgs); close(fd); return0;}在mini2440开发板上已经实验成功。
- Linux驱动子系统之I2C(3)
- Linux驱动子系统之I2C(3)
- Linux驱动子系统之I2C(3)
- Linux驱动子系统之I2C(3)
- Linux驱动子系统之I2C
- Linux驱动子系统之I2C
- linux驱动之--I2C子系统
- Linux驱动子系统之I2C(1)
- Linux驱动子系统之I2C(2)
- Linux驱动子系统之I2C(4)
- Linux驱动子系统之I2C(5)
- Linux驱动子系统之I2C(6)
- Linux驱动子系统之I2C(一)
- Linux驱动子系统之I2C(1)
- Linux驱动子系统之I2C(2)
- Linux驱动子系统之I2C(4)
- Linux驱动子系统之I2C(5)
- Linux驱动子系统之I2C(6)
- 突破LVS瓶颈,LVS Cluster部署(OSPF + LVS)
- Linux驱动子系统之I2C(2)
- String.format的用法(http://blog.csdn.net/lu8000/article/details/11717331)
- 计算几何模版
- matlab手记(3)
- Linux驱动子系统之I2C(3)
- 世界历史50大著名统治者
- 开源软件OpenBLAS的众筹经历
- 【问题记录】物理备库 MRP挂掉 ORA-16145
- Linux驱动子系统之I2C(4)
- mybatis返回类型string,或者对象,均可用list<string>或者,list<对象>来接收
- 林昊:用淘宝T4保障系统稳定性 降低运维成本
- Linux驱动子系统之I2C(5)
- centos上编译安装nginx1.28+mariadb5.5.30+php5.4.14+webbench1.5


