双边滤波matlab代码
来源:互联网 发布:云上贵州数据交换平台 编辑:程序博客网 时间:2024/04/30 15:05
%简单地说:%A为给定图像,归一化到[0,1]的矩阵%W为双边滤波器(核)的边长/2%定义域方差σd记为SIGMA(1),值域方差σr记为SIGMA(2)%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Pre-process input and select appropriate filter.function B = bfilter2(A,w,sigma)% Verify that the input image exists and is valid.if ~exist('A','var') || isempty(A) error('Input image A is undefined or invalid.');endif ~isfloat(A) || ~sum([1,3] == size(A,3)) || ... min(A(:)) < 0 || max(A(:)) > 1 error(['Input image A must be a double precision ',... 'matrix of size NxMx1 or NxMx3 on the closed ',... 'interval [0,1].']); end% Verify bilateral filter window size.if ~exist('w','var') || isempty(w) || ... numel(w) ~= 1 || w < 1 w = 5;endw = ceil(w);% Verify bilateral filter standard deviations.if ~exist('sigma','var') || isempty(sigma) || ... numel(sigma) ~= 2 || sigma(1) <= 0 || sigma(2) <= 0 sigma = [3 0.1];end% Apply either grayscale or color bilateral filtering.if size(A,3) == 1 B = bfltGray(A,w,sigma(1),sigma(2));else B = bfltColor(A,w,sigma(1),sigma(2));end%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Implements bilateral filtering for grayscale images.function B = bfltGray(A,w,sigma_d,sigma_r)% Pre-compute Gaussian distance weights.[X,Y] = meshgrid(-w:w,-w:w);%创建核距离矩阵,e.g.% [x,y]=meshgrid(-1:1,-1:1)% % x =% % -1 0 1% -1 0 1% -1 0 1% % % y =% % -1 -1 -1% 0 0 0% 1 1 1%计算定义域核G = exp(-(X.^2+Y.^2)/(2*sigma_d^2));% Create waitbar.h = waitbar(0,'Applying bilateral filter...');set(h,'Name','Bilateral Filter Progress');% Apply bilateral filter.%计算值域核H 并与定义域核G 乘积得到双边权重函数Fdim = size(A);B = zeros(dim);for i = 1:dim(1) for j = 1:dim(2) % Extract local region. iMin = max(i-w,1); iMax = min(i+w,dim(1)); jMin = max(j-w,1); jMax = min(j+w,dim(2)); %定义当前核所作用的区域为(iMin:iMax,jMin:jMax) I = A(iMin:iMax,jMin:jMax);%提取该区域的源图像值赋给I % Compute Gaussian intensity weights. H = exp(-(I-A(i,j)).^2/(2*sigma_r^2)); % Calculate bilateral filter response. F = H.*G((iMin:iMax)-i+w+1,(jMin:jMax)-j+w+1); B(i,j) = sum(F(:).*I(:))/sum(F(:)); end waitbar(i/dim(1));end% Close waitbar.close(h);%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Implements bilateral filter for color images.function B = bfltColor(A,w,sigma_d,sigma_r)% Convert input sRGB image to CIELab color space.if exist('applycform','file') A = applycform(A,makecform('srgb2lab'));else A = colorspace('Lab<-RGB',A);end% Pre-compute Gaussian domain weights.[X,Y] = meshgrid(-w:w,-w:w);G = exp(-(X.^2+Y.^2)/(2*sigma_d^2));% Rescale range variance (using maximum luminance).sigma_r = 100*sigma_r;% Create waitbar.h = waitbar(0,'Applying bilateral filter...');set(h,'Name','Bilateral Filter Progress');% Apply bilateral filter.dim = size(A);B = zeros(dim);for i = 1:dim(1) for j = 1:dim(2) % Extract local region. iMin = max(i-w,1); iMax = min(i+w,dim(1)); jMin = max(j-w,1); jMax = min(j+w,dim(2)); I = A(iMin:iMax,jMin:jMax,:); % Compute Gaussian range weights. dL = I(:,:,1)-A(i,j,1); da = I(:,:,2)-A(i,j,2); db = I(:,:,3)-A(i,j,3); H = exp(-(dL.^2+da.^2+db.^2)/(2*sigma_r^2)); % Calculate bilateral filter response. F = H.*G((iMin:iMax)-i+w+1,(jMin:jMax)-j+w+1); norm_F = sum(F(:)); B(i,j,1) = sum(sum(F.*I(:,:,1)))/norm_F; B(i,j,2) = sum(sum(F.*I(:,:,2)))/norm_F; B(i,j,3) = sum(sum(F.*I(:,:,3)))/norm_F; end waitbar(i/dim(1));end% Convert filtered image back to sRGB color space.if exist('applycform','file') B = applycform(B,makecform('lab2srgb'));else B = colorspace('RGB<-Lab',B);end% Close waitbar.close(h);调用方法:
I=imread('einstein.jpg');I=double(I)/255;w = 5; % bilateral filter half-widthsigma = [3 0.1]; % bilateral filter standard deviationsI1=bfilter2(I,w,sigma);subplot(1,2,1);imshow(I);subplot(1,2,2);imshow(I1)实验结果: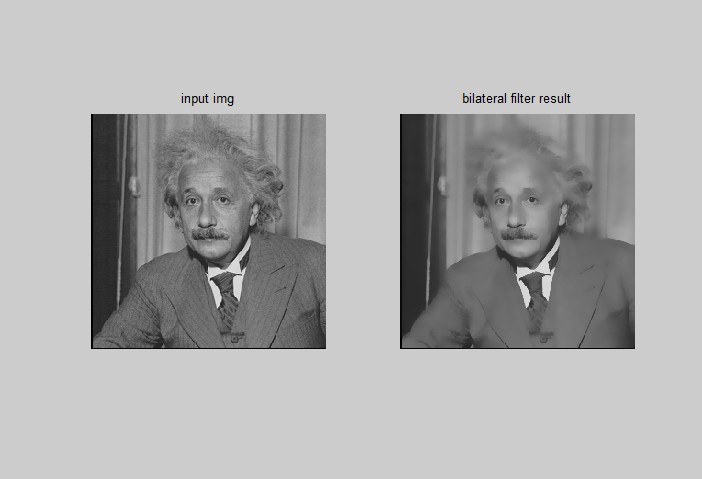
双边滤波模板主要有两个模板生成,第一个是高斯模板,第二个是以灰度级的差值作为函数系数生成的模板。然后这两个模板点乘就得到了最终的双边滤波模板。
第一个模板是全局模板,所以只需要生成一次。第二个模板需要对每个像素都计算一次,所以需要放到循环的里面来生成,这很像表面模糊啊。哦,表面模糊就是用了一个截尾滤波器。
这里的公式我参考了这里,不过她给的第二个好像不是截尾均值滤波器,而是以灰度差值为自变量的高斯滤波器。截尾均值滤波器这里有一些理论和实现,
代码如下:
clear all;close all;clc;img=imread('lena.jpg');img=mat2gray(img);[m n]=size(img);imshow(img);r=10; %模板半径imgn=zeros(m+2*r+1,n+2*r+1);imgn(r+1:m+r,r+1:n+r)=img;imgn(1:r,r+1:n+r)=img(1:r,1:n); %扩展上边界imgn(1:m+r,n+r+1:n+2*r+1)=imgn(1:m+r,n:n+r); %扩展右边界imgn(m+r+1:m+2*r+1,r+1:n+2*r+1)=imgn(m:m+r,r+1:n+2*r+1); %扩展下边界imgn(1:m+2*r+1,1:r)=imgn(1:m+2*r+1,r+1:2*r); %扩展左边界sigma_d=2;sigma_r=0.1;[x,y] = meshgrid(-r:r,-r:r);w1=exp(-(x.^2+y.^2)/(2*sigma_d^2)); %以距离作为自变量高斯滤波器h=waitbar(0,'wait...');for i=r+1:m+r for j=r+1:n+r w2=exp(-(imgn(i-r:i+r,j-r:j+r)-imgn(i,j)).^2/(2*sigma_r^2)); %以周围和当前像素灰度差值作为自变量的高斯滤波器 w=w1.*w2; s=imgn(i-r:i+r,j-r:j+r).*w; imgn(i,j)=sum(sum(s))/sum(sum(w)); end waitbar(i/m);endclose(h)figure;imshow(mat2gray(imgn(r+1:m+r,r+1:n+r)));第三种实现
双边滤波与一般的高斯滤波的不同就是:双边滤波既利用了位置信息<or 几何信息——高斯滤波只用了位置信息>又利用了像素信息来定义滤波窗口的权重。


像素值越接近,权重越大。双边滤波会去除图像的细节信息,又能保持边界。

对于彩色图像,像素值的接近与否不能使用RGB空间值,双边滤波的原始文献建议使用CIE颜色空间。
代码如下:
function resultI = BilateralFilt2(I,d,sigma)%%%%Author:LiFeiteng%Version:1.0——灰色图像 Time:2013/05/01%Version:1.1——灰色/彩色图像 Time:2013/05/02 2013/05/05%d 半窗口宽度I = double(I);if size(I,3)==1 resultI = BilateralFiltGray(I,d,sigma);elseif size(I,3)==3 resultI = BilateralFiltColor(I,d,sigma);else error('Incorrect image size') endendfunction resultI = BilateralFiltGray(I,d,sigma)[m n] = size(I);newI = ReflectEdge(I,d);resultI = zeros(m,n);width = 2*d+1;%DistanceD = fspecial('gaussian',[width,width],sigma(1));S = zeros(width,width);%pix Similarityh = waitbar(0,'Applying bilateral filter...');set(h,'Name','Bilateral Filter Progress');for i=1+d:m+d for j=1+d:n+d pixValue = newI(i-d:i+d,j-d:j+d); subValue = pixValue-newI(i,j); S = exp(-subValue.^2/(2*sigma(2)^2)); H = S.*D; resultI(i-d,j-d) = sum(pixValue(:).*H(:))/sum(H(:)); end waitbar(i/m);endclose(h);endfunction resultI = BilateralFiltColor(I,d,sigma)I = applycform(I,makecform('srgb2lab'));[m n ~] = size(I);newI = ReflectEdge(I,d);resultI = zeros(m,n,3);width = 2*d+1;%DistanceD = fspecial('gaussian',[width,width],sigma(1));% [X,Y] = meshgrid(-d:d,-d:d);% D = exp(-(X.^2+Y.^2)/(2*sigma(1)^2));S = zeros(width,width);%pix Similarityh = waitbar(0,'Applying bilateral filter...');set(h,'Name','Bilateral Filter Progress');sigma_r = 100*sigma(2);for i=1+d:m+d for j=1+d:n+d pixValue = newI(i-d:i+d,j-d:j+d,1:3); %subValue = pixValue-repmat(newI(i,j,1:3),width,width); dL = pixValue(:,:,1)-newI(i,j,1); da = pixValue(:,:,2)-newI(i,j,2); db = pixValue(:,:,3)-newI(i,j,3); S = exp(-(dL.^2+da.^2+db.^2)/(2*sigma_r^2)); H = S.*D; H = H./sum(H(:)); resultI(i-d,j-d,1) = sum(sum(pixValue(:,:,1).*H)); resultI(i-d,j-d,2) = sum(sum(pixValue(:,:,2).*H)); resultI(i-d,j-d,3) = sum(sum(pixValue(:,:,3).*H)); end waitbar(i/m);endclose(h);resultI = applycform(resultI,makecform('lab2srgb'));end其中newI = ReflectEdge(I,d); %对称地扩展边界,在原始图像I的边界处镜像映射像素值 function newI = ReflectEdge(I,d)%Version:1.0——灰色图像 Time:2013/05/01%Version:1.1——灰色/彩色图像 Time:2013/05/02%考虑到实用性,决定不添加更多的边界处理选择,统一使用:reflect across edgeif size(I,3)==1 newI = ReflectEdgeGray(I,d);elseif size(I,3)==3 newI = ReflectEdgeColor(I,d);else error('Incorrect image size') endendfunction newI = ReflectEdgeGray(I,d)[m n] = size(I);newI = zeros(m+2*d,n+2*d);%中间部分newI(d+1:d+m,d+1:d+n) = I;%上newI(1:d,d+1:d+n) = I(d:-1:1,:);%下newI(end-d:end,d+1:d+n) = I(end:-1:end-d,:);%左newI(:,1:d) = newI(:,2*d:-1:d+1);%右newI(:,m+d+1:m+2*d) = newI(:,m+d:-1:m+1);endfunction newI = ReflectEdgeColor(I,d)%扩展图像边界[m n ~] = size(I);newI = zeros(m+2*d,n+2*d,3);%中间部分newI(d+1:d+m,d+1:d+n,1:3) = I;%上newI(1:d,d+1:d+n,1:3) = I(d:-1:1,:,1:3);%下newI(end-d:end,d+1:d+n,1:3) = I(end:-1:end-d,:,1:3);%左newI(:,1:d,1:3) = newI(:,2*d:-1:d+1,1:3);%右newI(:,m+d+1:m+2*d,1:3) = newI(:,m+d:-1:m+1,1:3);end测试用例:img = imread('.\lena.tif');%%img = imread('.\images\lena_gray.tif');img = double(img)/255;img = img+0.05*randn(size(img));img(img<0) = 0; img(img>1) = 1;%img = imnoise(img,'gaussian');figure, imshow(img,[])title('原始图像')d = 6;sigma = [3 0.1];resultI = BilateralFilt2(double(img), d, sigma);figure, imshow(resultI,[])title('双边滤波后的图像')结果:

- 双边滤波matlab代码
- matlab 双边滤波
- matlab双边滤波
- 双边滤波(bilateral filter)灰度图 matlab实现代码
- 双边滤波(bilateral filter)彩色图 matlab实现代码
- 双边滤波(bilateral filter)快速算法 matlab实现代码
- 灰度图像双边滤波代码
- 双边滤波JAVA代码实现
- 双边滤波以及代码实现
- 双边滤波Matlab实现<The Bilateral Filter>
- 分享快速双边滤波matlab程序
- 双边滤波Matlab实现<The Bilateral Filter>
- 双边滤波
- 双边滤波
- 双边滤波
- 双边滤波
- 双边滤波
- 双边滤波
- 布局xml文件和模板phtml的对应关系
- vi 中将 Windows 文本文件中的 ^M (回车换行)全部替换掉
- Uboot 设置启动参数
- Difference between Comparator and Comparable in Java
- C# 从服务器下载文件代码
- 双边滤波matlab代码
- 行为模式(类图)
- Java读取中文文件出现乱码解决过程
- linux下如何使用sftp命令
- 【系统】Windows窗口数据管理和PE菜单资源分析
- opengl绘制花环(点的个数可以手动输入) 源代码
- android USB绑定(待补充)
- Linux操作系统PS命令详细解析(转)
- this class is not key value coding-compliant for the key uiWebView


