实现自己的线性滤波器
来源:互联网 发布:大数据工程师工资最高 编辑:程序博客网 时间:2024/05/20 08:42
目的
本篇教程中,我们将学到:
- 用OpenCV函数 filter2D 创建自己的线性滤波器。
原理
Note
以下解释节选自Bradski and Kaehler所著 Learning OpenCV 。
卷积
高度概括地说,卷积是在每一个图像块与某个算子(核)之间进行的运算。
核是什么?
核说白了就是一个固定大小的数值数组。该数组带有一个 锚点 ,一般位于数组中央。
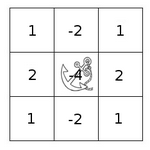
如何用核实现卷积?
假如你想得到图像的某个特定位置的卷积值,可用下列方法计算:
- 将核的锚点放在该特定位置的像素上,同时,核内的其他值与该像素邻域的各像素重合;
- 将核内各值与相应像素值相乘,并将乘积相加;
- 将所得结果放到与锚点对应的像素上;
- 对图像所有像素重复上述过程。
用公式表示上述过程如下:

幸运的是,我们不必自己去实现这些运算,OpenCV为我们提供了函数 filter2D 。
代码
下面这段程序做了些什么?
载入一幅图像
对图像执行 归一化块滤波器 。举例来说,如果该滤波器核的大小为
 ,则它会像下面这样:
,则它会像下面这样: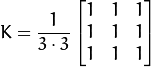
程序将执行核的大小分别为3、5、7、9、11的滤波器运算。
该滤波器每一种核的输出将在屏幕上显示500毫秒
本教程代码所示如下。你也可以从 这里 下载。
说明
载入一幅图像
创建窗口以显示结果
初始化线性滤波器的参数
执行无限循环。在循环中,我们更新了核的大小,并将线性滤波器用在输入图像上。下面,我们详细分析一下该循环:
首先,我们定义滤波器要用到的核。像下面这样:
第一行代码将 核的大小 设置为
![[3,11]](http://www.opencv.org.cn/opencvdoc/2.3.2/html/_images/math/d06ded5510df3d9bb3bb09a89c0ce9b717998628.png) 范围内的奇数。第二行代码把1填充进矩阵,并执行归一化——除以矩阵元素数——以构造出所用的核。
范围内的奇数。第二行代码把1填充进矩阵,并执行归一化——除以矩阵元素数——以构造出所用的核。将核设置好之后,使用函数 filter2D 就可以生成滤波器:
其中各参数含义如下:
- src: 源图像
- dst: 目标图像
- ddepth: dst 的深度。若为负值(如
 ),则表示其深度与源图像相等。
),则表示其深度与源图像相等。 - kernel: 用来遍历图像的核
- anchor: 核的锚点的相对位置,其中心点默认为 (-1, -1) 。
- delta: 在卷积过程中,该值会加到每个像素上。默认情况下,这个值为
 。
。 - BORDER_DEFAULT: 这里我们保持其默认值,更多细节将在其他教程中详解
#. 我们在程序里写了个 while 循环。每隔500毫秒,滤波器的核将在我们所指定的范围内更新。 结果 ========
编译好上述代码之后,输入图像路径的参数,我们就可以执行这个程序。其输出结果是一个窗口,其中显示了由归一化滤波器模糊之后的图像。每过0.5秒,滤波器核的大小会有所变化,如你在下面几张图像中所见:

翻译者
loveisp@ OpenCV中文网站 <loveispdvd@gmail.com>
转自http://www.opencv.org.cn/opencvdoc/2.3.2/html/doc/tutorials/imgproc/imgtrans/filter_2d/filter_2d.html#filter-2d
- 实现自己的线性滤波器
- 实现自己的线性滤波器
- opencv c++函数 imgproc模块 6 实现自己的线性滤波器
- OpenCV之imgproc 模块. 图像处理(2)实现自己的线性滤波器 给图像添加边界 Sobel 导数 Laplace 算子 Canny 边缘检测
- imgproc模块--filter2D实现线性滤波器
- java自己实现的线性队列
- FIR滤波器的实现
- 均值滤波器与中值滤波器的实现
- 求线性滤波器的频率响应.m
- 5.1 线性相位FIR滤波器的特性
- 离散随机线性系统的卡尔曼滤波器基本原理及实现
- 离散随机线性系统的卡尔曼滤波器基本原理和实现
- opencv学习-imgprocess-创建自己的滤波器
- Gabor滤波器的代码实现
- FIR滤波器的DSP实现
- FIR滤波器的FPGA实现
- IIR滤波器的C实现
- FPGA的中值滤波器实现
- Object类
- 关于伪造邮件的攻与防
- 日常理财
- 【算法-排序之四】希尔排序
- avg
- 实现自己的线性滤波器
- MySQL学习系列之关于information_schema(一)
- FPGA学习网站
- CCS3.3配置方法
- Peer-To-Peer 综述(P2P技术综述)
- char字符串转CString
- 声明式事务
- Oracle中sqlldr使用
- Android新版NDK环境配置


