B-树和B+树的应用
来源:互联网 发布:李善兰 知乎 编辑:程序博客网 时间:2024/04/30 01:52
目录(?)[+]
B-树
1 .B-树定义
B-树是一种平衡的多路查找树,它在文件系统中很有用。
定义:一棵m 阶的B-树,或者为空树,或为满足下列特性的m 叉树:
⑴树中每个结点至多有m 棵子树;
⑵若根结点不是叶子结点,则至少有两棵子树;
⑶除根结点之外的所有非终端结点至少有[m/2] 棵子树;
⑷所有的非终端结点中包含以下信息数据:
(n,A0,K1,A1,K2,…,Kn,An)
其中:Ki(i=1,2,…,n)为关键码,且Ki<Ki+1,
Ai 为指向子树根结点的指针(i=0,1,…,n),且指针Ai-1 所指子树中所有结点的关键码均小于Ki(i=1,2,…,n),An 所指子树中所有结点的关键码均大于Kn.
n  为关键码的个数。
为关键码的个数。
⑸所有的叶子结点都出现在同一层次上,并且不带信息(可以看作是外部结点或查找失败的结点,实际上这些结点不存在,指向这些结点的指针为空)。
即所有叶节点具有相同的深度,等于树高度。
如一棵四阶B-树,其深度为4.
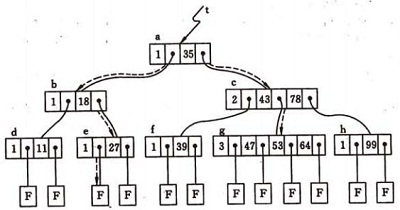
B-树的查找类似二叉排序树的查找,所不同的是B-树每个结点上是多关键码的有序表,在到达某个结点时,先在有序表中查找,若找到,则查找成功;否则,到按照对应的指针信息指向的子树中去查找,当到达叶子结点时,则说明树中没有对应的关键码。
在上图的B-树上查找关键字47的过程如下:
1)首先从更开始,根据根节点指针找到 *节点,因为 *a 节点中只有一个关键字,且给定值47 > 关键字35,则若存在必在指针A1所指的子树内。
2)顺指针找到 *c节点,该节点有两个关键字(43和 78),而43 < 47 < 78,若存在比在指针A1所指的子树中。
3)同样,顺指针找到 *g节点,在该节点找到关键字47,查找成功。
2. 查找算法
- typedef int KeyType ;
- #define m 5 /*B 树的阶,暂设为5*/
- typedef struct Node{
- int keynum; /* 结点中关键码的个数,即结点的大小*/
- struct Node *parent; /*指向双亲结点*/
- KeyType key[m+1]; /*关键码向量,0 号单元未用*/
- struct Node *ptr[m+1]; /*子树指针向量*/
- Record *recptr[m+1]; /*记录指针向量*/
- }NodeType; /*B 树结点类型*/
-
- typedef struct{
- NodeType *pt; /*指向找到的结点*/
- int i; /*在结点中的关键码序号,结点序号区间[1…m]*/
- int tag; /* 1:查找成功,0:查找失败*/
- }Result; /*B 树的查找结果类型*/
-
- Result SearchBTree(NodeType *t,KeyType kx)
- {
- /*在m 阶B 树t 上查找关键码kx,反回(pt,i,tag)。若查找成功,则特征值tag=1,*/
- /*指针pt 所指结点中第i 个关键码等于kx;否则,特征值tag=0,等于kx 的关键码记录*/
- /*应插入在指针pt 所指结点中第i 个和第i+1 个关键码之间*/
- p=t;q=NULL;found=FALSE;i=0; /*初始化,p 指向待查结点,q 指向p 的双亲*/
- while(p&&!found)
- { n=p->keynum;i=Search(p,kx); /*在p-->key[1…keynum]中查找*/
- if(i>0&&p->key[i]= =kx) found=TRUE; /*找到*/
- else {q=p;p=p->ptr[i];}
- }
- if(found) return (p,i,1); /*查找成功*/
- else return (q,i,0); /*查找不成功,反回kx 的插入位置信息*/
- }
B- 树查找算法分析
从查找算法中可以看出, 在B- 树中进行查找包含两种基本操作:
( 1) 在B- 树中查找结点;
( 2) 在结点中查找关键字。
由于B- 树通常存储在磁盘上, 则前一查找操作是在磁盘上进行的, 而后一查找操作是在内存中进行的, 即在磁盘上找到指针p 所指结点后, 先将结点中的信息读入内存, 然后再利用顺序查找或折半查找查询等于K 的关键字。显然, 在磁盘上进行一次查找比在内存中进行一次查找的时间消耗多得多.
因此, 在磁盘上进行查找的次数、即待查找关键字所在结点在B- 树上的层次树, 是决定B树查找效率的首要因素
那么,对含有n 个关键码的m 阶B-树,最坏情况下达到多深呢?可按二叉平衡树进行类似分析。首先,讨论m 阶B-数各层上的最少结点数。
由B树定义:B树包含n个关键字。因此有n+1个树叶都在第J+1 层。
1)第一层为根,至少一个结点,根至少有两个孩子,因此在第二层至少有两个结点。
2)除根和树叶外,其它结点至少有[m/2]个孩子,因此第三层至少有2*[m/2]个结点,在第四层至少有2*[m/2]2 个结点…
3)那么在第J+1层至少有2*[m/2]J-1个结点,而J+1层的结点为叶子结点,于是叶子结点的个数n+1。有:
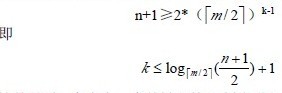
也就是说在n个关键字的B树查找,从根节点到关键字所在的节点所涉及的节点数不超过:
3.B-树的插入
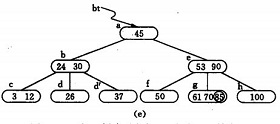
B-树的生成也是从空树起,逐个插入关键字而得。但由于B-树结点中的关键字个数必须≥ceil(m/2)-1,因此,每次插入一个关键字不是在树中添加一个叶子结点,而是首先在最低层的某个非终端结点中添加一个关键字,若该结点的关键字个数不超过m-1,则插入完成,否则要产生结点的“分裂”,
如图(a) 为3阶的B-树(图中略去F结点(即叶子结点)),假设需依次插入关键字30,26,85。

1) 首先通过查找确定插入的位置。由根*a 起进行查找,确定30应插入的在*d 节点中。由于*d 中关键字数目不超过2(即m-1),故第一个关键字插入完成:如(b)
2) 同样,通过查找确定关键字26亦应插入 *d. 由于*d节点关键字数目超过2,此时需要将 *d分裂成两个节点,关键字26及其前、后两个指针仍保留在 *d 节点中,而关键字37 及其前、后两个指针存储到新的产生的节点 *d` 中。同时将关键字30 和指示节点 *d `的指针插入到其双亲的节点中。由于 *b节点中的关键字数目没有超过2,则插入完成.如(c)(d)

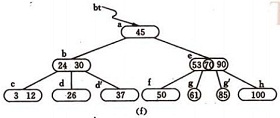
3) (e) -(g) 为插入85后;

插入算法:
- int InserBTree(NodeType **t,KeyType kx,NodeType *q,int i){
- /* 在m 阶B 树*t 上结点*q 的key[i],key[i+1]之间插入关键码kx*/
- /*若引起结点过大,则沿双亲链进行必要的结点分裂调整,使*t仍为m 阶B 树*/
- x=kx;ap=NULL;finished=FALSE;
- while(q&&!finished)
- {
- Insert(q,i,x,ap); /*将x 和ap 分别插入到q->key[i+1]和q->ptr[i+1]*/
- if(q->keynum<m) finished=TRUE; /*插入完成*/
- else
- { /*分裂结点*p*/
- s=m/2;split(q,ap);x=q->key[s];
- /*将q->key[s+1…m],q->ptr[s…m]和q->recptr[s+1…m]移入新结点*ap*/
- q=q->parent;
- if(q) i=Search(q,kx); /*在双亲结点*q 中查找kx 的插入位置*/
- }
- }
- if(!finished) /*(*t)是空树或根结点已分裂为*q*和ap*/
- NewRoot(t,q,x,ap); /*生成含信息(t,x,ap)的新的根结点*t,原*t 和ap 为子树指针*/
- }
4. B-树的删除
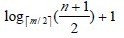
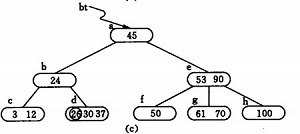
反之,若在B-树上删除一个关键字,则首先应找到该关键字所在结点,并从中删除之,若该结点为最下层的非终端结点,且其中的关键字数目不少于ceil(m/2),则删除完成,否则要进行“合并”结点的操作。假若所删关键字为非终端结点中的Ki,则可以指针Ai所指子树中的最小关键字Y替代Ki,然后在相应的结点中删去Y。例如,在下图 图4.1( a)的B-树上删去45,可以*f结点中的50替代45,然后在*f结点中删去50。
图4.1( a)
因此,下面我们可以只需讨论删除最下层非终端结点中的关键字的情形。有下列三种可能:
(1)被删关键字所在结点中的关键字数目不小于ceil(m/2),则只需从该结点中删去该关键字Ki和相应指针Ai,树的其它部分不变,例如,从图 图4.1( a)所示B-树中删去关键字12,删除后的B-树如图 图4.2( a)所示:
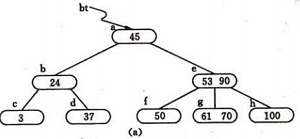
图4.2( a)
(2)被删关键字所在结点中的关键字数目等于ceil(m/2)-1,而与该结点相邻的右兄弟(或左兄弟)结点中的关键字数目大于ceil(m/2)-1,则需将其兄弟结点中的最小(或最大)的关键字上移至双亲结点中,而将双亲结点中小于(或大于)且紧靠该上移关键字的关键字下移至被删关键字所在结点中。
[例如],从图图4.2( a)中删去50,需将其右兄弟结点中的61上移至*e结点中,而将*e结点中的53移至*f,从而使*f和*g中关键字数目均不小于ceil(m-1)-1,而双亲结点中的关键字数目不变,如图图4.2(b)所示。
图4.2(b)
(3)被删关键字所在结点和其相邻的兄弟结点中的关键字数目均等于ceil(m/2)-1。假设该结点有右兄弟,且其右兄弟结点地址由双亲结点中的指针Ai所指,则在删去关键字之后,它所在结点中剩余的关键字和指针,加上双亲结点中的关键字Ki一起,合并到 Ai所指兄弟结点中(若没有右兄弟,则合并至左兄弟结点中)。
[例如],从图4.2(b)所示 B-树中删去53,则应删去*f结点,并将*f中的剩余信息(指针“空”)和双亲*e结点中的 61一起合并到右兄弟结点*g中。删除后的树如图4.2(c)所示。

图4.2(c)
如果因此使双亲结点中的关键字数目小于ceil(m/2)-1,则依次类推。
[例如],在 图4.2(c)的B-树中删去关键字37之后,双亲b结点中剩余信息(“指针c”)应和其双亲*a结点中关键字45一起合并至右兄弟结点*e中,删除后的B-树如图 4.2(d)所示。
图 4.2(d)
B-树主要应用在文件系统
为了将大型数据库文件存储在硬盘上 以减少访问硬盘次数为目的 在此提出了一种平衡多路查找树——B-树结构 由其性能分析可知它的检索效率是相当高的 为了提高 B-树性能’还有很多种B-树的变型,力图对B-树进行改进
目录(?)[+]
B-树
1 .B-树定义
B-树是一种平衡的多路查找树,它在文件系统中很有用。
定义:一棵m 阶的B-树,或者为空树,或为满足下列特性的m 叉树:
⑴树中每个结点至多有m 棵子树;
⑵若根结点不是叶子结点,则至少有两棵子树;
⑶除根结点之外的所有非终端结点至少有[m/2] 棵子树;
⑷所有的非终端结点中包含以下信息数据:
(n,A0,K1,A1,K2,…,Kn,An)
其中:Ki(i=1,2,…,n)为关键码,且Ki<Ki+1,
Ai 为指向子树根结点的指针(i=0,1,…,n),且指针Ai-1 所指子树中所有结点的关键码均小于Ki(i=1,2,…,n),An 所指子树中所有结点的关键码均大于Kn.
n 为关键码的个数。
⑸所有的叶子结点都出现在同一层次上,并且不带信息(可以看作是外部结点或查找失败的结点,实际上这些结点不存在,指向这些结点的指针为空)。
即所有叶节点具有相同的深度,等于树高度。
如一棵四阶B-树,其深度为4.
B-树的查找类似二叉排序树的查找,所不同的是B-树每个结点上是多关键码的有序表,在到达某个结点时,先在有序表中查找,若找到,则查找成功;否则,到按照对应的指针信息指向的子树中去查找,当到达叶子结点时,则说明树中没有对应的关键码。
在上图的B-树上查找关键字47的过程如下:
1)首先从更开始,根据根节点指针找到 *节点,因为 *a 节点中只有一个关键字,且给定值47 > 关键字35,则若存在必在指针A1所指的子树内。
2)顺指针找到 *c节点,该节点有两个关键字(43和 78),而43 < 47 < 78,若存在比在指针A1所指的子树中。
3)同样,顺指针找到 *g节点,在该节点找到关键字47,查找成功。
2. 查找算法
- typedef int KeyType ;
- #define m 5 /*B 树的阶,暂设为5*/
- typedef struct Node{
- int keynum; /* 结点中关键码的个数,即结点的大小*/
- struct Node *parent; /*指向双亲结点*/
- KeyType key[m+1]; /*关键码向量,0 号单元未用*/
- struct Node *ptr[m+1]; /*子树指针向量*/
- Record *recptr[m+1]; /*记录指针向量*/
- }NodeType; /*B 树结点类型*/
- typedef struct{
- NodeType *pt; /*指向找到的结点*/
- int i; /*在结点中的关键码序号,结点序号区间[1…m]*/
- int tag; /* 1:查找成功,0:查找失败*/
- }Result; /*B 树的查找结果类型*/
- Result SearchBTree(NodeType *t,KeyType kx)
- {
- /*在m 阶B 树t 上查找关键码kx,反回(pt,i,tag)。若查找成功,则特征值tag=1,*/
- /*指针pt 所指结点中第i 个关键码等于kx;否则,特征值tag=0,等于kx 的关键码记录*/
- /*应插入在指针pt 所指结点中第i 个和第i+1 个关键码之间*/
- p=t;q=NULL;found=FALSE;i=0; /*初始化,p 指向待查结点,q 指向p 的双亲*/
- while(p&&!found)
- { n=p->keynum;i=Search(p,kx); /*在p-->key[1…keynum]中查找*/
- if(i>0&&p->key[i]= =kx) found=TRUE; /*找到*/
- else {q=p;p=p->ptr[i];}
- }
- if(found) return (p,i,1); /*查找成功*/
- else return (q,i,0); /*查找不成功,反回kx 的插入位置信息*/
- }
B- 树查找算法分析
从查找算法中可以看出, 在B- 树中进行查找包含两种基本操作:
( 1) 在B- 树中查找结点;
( 2) 在结点中查找关键字。
由于B- 树通常存储在磁盘上, 则前一查找操作是在磁盘上进行的, 而后一查找操作是在内存中进行的, 即在磁盘上找到指针p 所指结点后, 先将结点中的信息读入内存, 然后再利用顺序查找或折半查找查询等于K 的关键字。显然, 在磁盘上进行一次查找比在内存中进行一次查找的时间消耗多得多.
因此, 在磁盘上进行查找的次数、即待查找关键字所在结点在B- 树上的层次树, 是决定B树查找效率的首要因素
那么,对含有n 个关键码的m 阶B-树,最坏情况下达到多深呢?可按二叉平衡树进行类似分析。首先,讨论m 阶B-数各层上的最少结点数。
由B树定义:B树包含n个关键字。因此有n+1个树叶都在第J+1 层。
1)第一层为根,至少一个结点,根至少有两个孩子,因此在第二层至少有两个结点。
2)除根和树叶外,其它结点至少有[m/2]个孩子,因此第三层至少有2*[m/2]个结点,在第四层至少有2*[m/2]2 个结点…
3)那么在第J+1层至少有2*[m/2]J-1个结点,而J+1层的结点为叶子结点,于是叶子结点的个数n+1。有:
也就是说在n个关键字的B树查找,从根节点到关键字所在的节点所涉及的节点数不超过:
3.B-树的插入
B-树的生成也是从空树起,逐个插入关键字而得。但由于B-树结点中的关键字个数必须≥ceil(m/2)-1,因此,每次插入一个关键字不是在树中添加一个叶子结点,而是首先在最低层的某个非终端结点中添加一个关键字,若该结点的关键字个数不超过m-1,则插入完成,否则要产生结点的“分裂”,
如图(a) 为3阶的B-树(图中略去F结点(即叶子结点)),假设需依次插入关键字30,26,85。
1) 首先通过查找确定插入的位置。由根*a 起进行查找,确定30应插入的在*d 节点中。由于*d 中关键字数目不超过2(即m-1),故第一个关键字插入完成:如(b)
2) 同样,通过查找确定关键字26亦应插入 *d. 由于*d节点关键字数目超过2,此时需要将 *d分裂成两个节点,关键字26及其前、后两个指针仍保留在 *d 节点中,而关键字37 及其前、后两个指针存储到新的产生的节点 *d` 中。同时将关键字30 和指示节点 *d `的指针插入到其双亲的节点中。由于 *b节点中的关键字数目没有超过2,则插入完成.如(c)(d)
3) (e) -(g) 为插入85后;
插入算法:
- int InserBTree(NodeType **t,KeyType kx,NodeType *q,int i){
- /* 在m 阶B 树*t 上结点*q 的key[i],key[i+1]之间插入关键码kx*/
- /*若引起结点过大,则沿双亲链进行必要的结点分裂调整,使*t仍为m 阶B 树*/
- x=kx;ap=NULL;finished=FALSE;
- while(q&&!finished)
- {
- Insert(q,i,x,ap); /*将x 和ap 分别插入到q->key[i+1]和q->ptr[i+1]*/
- if(q->keynum<m) finished=TRUE; /*插入完成*/
- else
- { /*分裂结点*p*/
- s=m/2;split(q,ap);x=q->key[s];
- /*将q->key[s+1…m],q->ptr[s…m]和q->recptr[s+1…m]移入新结点*ap*/
- q=q->parent;
- if(q) i=Search(q,kx); /*在双亲结点*q 中查找kx 的插入位置*/
- }
- }
- if(!finished) /*(*t)是空树或根结点已分裂为*q*和ap*/
- NewRoot(t,q,x,ap); /*生成含信息(t,x,ap)的新的根结点*t,原*t 和ap 为子树指针*/
- }
反之,若在B-树上删除一个关键字,则首先应找到该关键字所在结点,并从中删除之,若该结点为最下层的非终端结点,且其中的关键字数目不少于ceil(m/2),则删除完成,否则要进行“合并”结点的操作。假若所删关键字为非终端结点中的Ki,则可以指针Ai所指子树中的最小关键字Y替代Ki,然后在相应的结点中删去Y。例如,在下图 图4.1( a)的B-树上删去45,可以*f结点中的50替代45,然后在*f结点中删去50。
图4.1( a)
因此,下面我们可以只需讨论删除最下层非终端结点中的关键字的情形。有下列三种可能:
(1)被删关键字所在结点中的关键字数目不小于ceil(m/2),则只需从该结点中删去该关键字Ki和相应指针Ai,树的其它部分不变,例如,从图 图4.1( a)所示B-树中删去关键字12,删除后的B-树如图 图4.2( a)所示:
图4.2( a)
(2)被删关键字所在结点中的关键字数目等于ceil(m/2)-1,而与该结点相邻的右兄弟(或左兄弟)结点中的关键字数目大于ceil(m/2)-1,则需将其兄弟结点中的最小(或最大)的关键字上移至双亲结点中,而将双亲结点中小于(或大于)且紧靠该上移关键字的关键字下移至被删关键字所在结点中。
[例如],从图图4.2( a)中删去50,需将其右兄弟结点中的61上移至*e结点中,而将*e结点中的53移至*f,从而使*f和*g中关键字数目均不小于ceil(m-1)-1,而双亲结点中的关键字数目不变,如图图4.2(b)所示。
图4.2(b)
(3)被删关键字所在结点和其相邻的兄弟结点中的关键字数目均等于ceil(m/2)-1。假设该结点有右兄弟,且其右兄弟结点地址由双亲结点中的指针Ai所指,则在删去关键字之后,它所在结点中剩余的关键字和指针,加上双亲结点中的关键字Ki一起,合并到 Ai所指兄弟结点中(若没有右兄弟,则合并至左兄弟结点中)。
[例如],从图4.2(b)所示 B-树中删去53,则应删去*f结点,并将*f中的剩余信息(指针“空”)和双亲*e结点中的 61一起合并到右兄弟结点*g中。删除后的树如图4.2(c)所示。
图4.2(c)
如果因此使双亲结点中的关键字数目小于ceil(m/2)-1,则依次类推。
[例如],在 图4.2(c)的B-树中删去关键字37之后,双亲b结点中剩余信息(“指针c”)应和其双亲*a结点中关键字45一起合并至右兄弟结点*e中,删除后的B-树如图 4.2(d)所示。
图 4.2(d)
B-树主要应用在文件系统
为了将大型数据库文件存储在硬盘上 以减少访问硬盘次数为目的 在此提出了一种平衡多路查找树——B-树结构 由其性能分析可知它的检索效率是相当高的 为了提高 B-树性能’还有很多种B-树的变型,力图对B-树进行改进
B+树
树的差异在于:
⑴有n 棵子树的结点中含有n 个关键码;
⑵所有的叶子结点中包含了全部关键码的信息,及指向含有这些关键码记录的指针,且
叶子结点本身依关键码的大小自小而大的顺序链接。
⑶所有的非终端结点可以看成是索引部分,结点中仅含有其子树根结点中最大(或最小)关键码。

树,不管查找成功与否,每次查找都是走了一条从根到叶子结点的路径。
- B-树和B+树的应用
- B-树和B+树的应用
- B-树和B+树的应用:数据搜索…
- B+树B-树的应用
- B+树B-树的应用
- b树和hash的应用场景
- B,B-,B+ 和B*树
- B-和B+树
- B-和B+树
- B和B+树
- B和B+树
- B和B+树
- B和B+树
- B-和B+树
- B树和B+树的区别
- B树和B+树的区别
- b树和b+树的区别
- B树和B+树的理解
- JavaSE_34_成员变量
- LeetCode-Valid Palindrome
- C# 解压及压缩文件源码
- Git学习之一
- Restlet
- B-树和B+树的应用
- tomcat下配置https环境教程
- cocos2d-x 2.2.0 图片选中聚焦 ,图片描边 CCClippingNode 实现
- JavaSE_35_值传递
- 算法思路(续)
- 设计模式一日一练:装饰者模式(Decorator)
- 又是内存泄漏—”HeartBleed”漏洞及其一种可能的利用思路
- String reorder(一道自定义排序题)
- JavaSE_99_编程惯例


