FS_11C14温湿度传感器(二)
来源:互联网 发布:率土之滨数据修改器 编辑:程序博客网 时间:2024/04/29 08:08
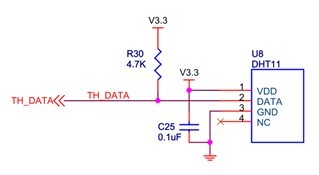
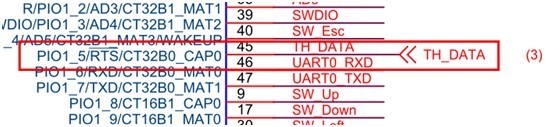
在FS_11C14平台DHT11传感器程序:
/*******************************************************************************
* Function Name : Read_Temp_Hum
* Description : Read Temp & Hum.
* Input : - temp : temp buf pointer.
* - hum : hum buf pointer.
* Output : - temp[0] : temp x. part
* - temp[1] : temp .x part
* - hum[0] : hum x. part
* - hum[1] : hum .x part
* Return : - 1, checksum ok
* - 0, checksum fail
*******************************************************************************/
uint32_t Read_Temp_Hum(uint8_t *temp, uint8_t *hum)
{
uint32_t cnt_last;
uint8_t hum_10, hum_01, temp_10, temp_01, chksum, chk;
uint32_t tc1, tc;
uint32_t i;
p3_2_counter = 0;
cnt_last = p3_2_counter;
GPIOIntDisable(PORT1, 5);
GPIOSetDir(PORT1, 5, 1); // Set PIO1_5 to output
GPIOSetValue(PORT1, 5, 0);
delay_ms(30);
GPIOSetValue(PORT1, 5, 1);
GPIOSetDir(PORT1, 5, 0);
GPIOSetInterrupt(PORT1, 5, 0, 0, 0);
GPIOIntEnable(PORT1, 5);
for(i=0; i<3; i++) //waiting 80uS low level and 80 uS high level
{
GPIOSetInterrupt(PORT1, 5, 0, 0, i&0x01);
while(p3_2_counter == cnt_last);
cnt_last = p3_2_counter;
}
for(i=0; i<40; i++)
{ // Loop to receive 40 bit data
GPIOSetInterrupt(PORT1, 5, 0, 0, 1);
while(p3_2_counter == cnt_last);
cnt_last = p3_2_counter;
tc1 = p3_2_tc;
GPIOSetInterrupt(PORT1, 5, 0, 0, 0);
while(p3_2_counter == cnt_last);
cnt_last = p3_2_counter;
if(p3_2_tc < tc1)
{
tc = tc1 - p3_2_tc;
}
else
{
tc = 48000 - (p3_2_tc - tc1);
}
if(i < 8) //one byte
{
hum_10 <<= 1;
if(tc >= 2328)
hum_10 |= 0x01;
}
else if(i < 16) // two byte
{
hum_01 <<= 1;
if(tc >= 2328)
hum_01 |= 0x01;
}
else if(i < 24) // three byte
{
temp_10 <<;= 1;
if(tc >= 2328)
temp_10 |= 0x01;
}
else if(i < 32) // four byte
{
temp_01 <<= 1;
if(tc >= 2328)
temp_01 |= 0x01;
}
else // five byte checksum
{
chksum <<= 1;
if(tc >= 2328)
chksum |= 0x01;
}
}
GPIOSetInterrupt(PORT1, 5, 0, 0, 1);
while(p3_2_counter == cnt_last);
GPIOIntDisable(PORT1, 5);
*temp = temp_10;
*(temp+1) = temp_01;
*hum = hum_10;
*(hum+1) = hum_01;
chk = hum_10; // Calculate to Checksum
chk += hum_01;
chk += temp_10;
chk += temp_01;
if(chk == chksum) // Received data is OK
return 1;
else
return 0;
}
/*******************************************************************************
* Function Name : Temp_Hum_Test
* Description : Temp & Hum func test.
* Input : None
* Output : None
* Return : None
*******************************************************************************/
void Temp_Hum_Test(void)
{
uint8_t temp[2], hum[2];
char buf[20];
uint32_t i;
OLED_ClearScreen();
OLED_DisStrLine(0, 0, "Temp & Hum");
while(1)
{
i = Read_Temp_Hum(temp, hum);
if(i)
{
if(temp[0]&0x80)
{
temp[0] &= 0x7f;
snprintf(buf, 16, "Temp: -%d.%d ", temp[0], temp[1]);
}
else
{
snprintf(buf, 16, "Temp: %d.%d ", temp[0], temp[1]);
}
OLED_DisStrLine(2, 0, (uint8_t *)buf);
snprintf(buf, 16, "Hum: %d.%d ", hum[0], hum[1]);
OLED_DisStrLine(3, 0, (uint8_t *)buf);
printf("\r\nTemp: %d.%d Hum: %d.%d", temp[0], temp[1], hum[0], hum[1]);
}
else
{
printf("\r\nfail");
}
delay_ms(500);
}
}
/**** End of File ****/
- FS_11C14温湿度传感器(二)
- c# 温湿度变送器传感器开发(二)
- 基于DHT11温湿度传感器的Android硬件访问服务的简单实现(二)
- 树莓派连接DHT11温湿度传感器(python)
- 【raspberry】(四)温湿度传感器DHT11
- c# 温湿度变送器传感器开发(一)
- hikey开发板温湿度传感器(一)
- 传感器系列 温湿度传感器DHt11
- DHT21温湿度传感器使用
- 温湿度传感器(九纯健科技)
- 温湿度传感器DHT11
- 温湿度传感器驱动模块
- 温湿度传感器调研报告
- DHT11温湿度传感器
- sht11温湿度传感器
- 温湿度传感器-DHT11
- Arduino - DHT11温湿度传感器
- arduino DHT11 温湿度传感器
- Cortex-M0 LPC11C14中断控制器
- Android清除数据
- svn常用命令
- UNIX环境高级编程第二版中编译程序提示“apue.h:找不到这个文件或目录”错误
- http 错误代码表
- FS_11C14温湿度传感器(二)
- Allegro批量复制Via并保持net属性
- 设定ofbiz的日志输出级别
- IOS tabbarController 的delegate控制双击不会返回
- FL2440 Flash分区修改,充分利用256M的nand flash
- 利用phpnow搭建本地服务器供外网访问,使用动态域名解析
- eclipse上ofbiz项目的断点调试
- 交叉表、行列转换和交叉查询经典
- 方法—Swift学习笔记(十四)


