mini2440 SPI驱动移植 (基于SPI子系统)
来源:互联网 发布:淘宝海报的尺寸是多少 编辑:程序博客网 时间:2024/05/16 06:42
参考一:
按照下面帖子的方法,本人试验成功,只需按照下面步骤进行就行了。
原帖地址: http://blog.csdn.net/lxmky/article/details/6858322
注:原文最后短接的MISO和MOSI指的是SPI1的,区别于SPI0
mini2440中,SPI0和SPI1的四个功能引脚均接有上拉电阻10K到3.3V。
引脚
SPICLK0
SPIMISO0
SPIMOSI0
nSS0/GPG2/EINT10
复用功能
GPE13
GPE11
GPE12
Only for slave mode P23
CON4 引脚
27
25
26
28
SPI1同时接到开发板上的按键
引脚
SPICLK1
SPIMISO1
SPIMOSI1
nSS1/GPG3/EINT11
复用功能
GPG7/EINT15
GPG5/EINT13
GPG6/EINT14
Only for slave mode P23
CON4 引脚
21
19
20
18
---------------------------------------------------------------------------------- 分隔线---------------------------------------------
最近项目需要,需要在mini2440上移植SPI驱动,板子需要驱动SPI设备,上网找了很多资源,但是很多都是有问题,最终在基本理解驱动结构的前提下,将SPI驱动顺利移植到mini2440。
,我使用的内核版本是2.6.32.2,这个版本和2.6。29不一样,网上很多版本都是关于2.6.29,如果完全按照网上步骤,编译会出现问题,我做的步骤如下:
1,在Linux Source Code中修改arch/arm/mach-s3c2440/mach-mini2440.c文件,加入头文件:
- #include <linux/spi/spi.h>
- #include <../mach-s3c2410/include/mach/spi.h>
- static struct spi_board_info s3c2410_spi0_board[] =
- {
- [0] = {
- .modalias = "spidev",
- .bus_num = 0,
- .chip_select = 0,
- .irq = IRQ_EINT9,
- .max_speed_hz = 500 * 1000,
- }
- };
- static struct s3c2410_spi_info s3c2410_spi0_platdata = {
- .pin_cs = S3C2410_GPG(2),
- .num_cs = 1,
- .bus_num = 0,
- .gpio_setup = s3c24xx_spi_gpiocfg_bus0_gpe11_12_13,
- };
- static struct spi_board_info s3c2410_spi1_board[] =
- {
- [0] = {
- .modalias = "spidev",
- .bus_num = 1,
- .chip_select = 0,
- .irq = IRQ_EINT2,
- .max_speed_hz = 500 * 1000,
- }
- };
- static struct s3c2410_spi_info s3c2410_spi1_platdata = {
- .pin_cs = S3C2410_GPG(3),
- .num_cs = 1,
- .bus_num = 1,
- .gpio_setup = s3c24xx_spi_gpiocfg_bus1_gpg5_6_7,
- };
在mini2440_devices[]平台数组中添加如下代码:
- &s3c_device_spi0,
- &s3c_device_spi1,
- s3c_device_spi0.dev.platform_data= &s3c2410_spi0_platdata;
- spi_register_board_info(s3c2410_spi0_board, ARRAY_SIZE(s3c2410_spi0_board));
- s3c_device_spi1.dev.platform_data= &s3c2410_spi1_platdata;
- spi_register_board_info(s3c2410_spi1_board, ARRAY_SIZE(s3c2410_spi1_board));
最后需要修改arch/arm/plat-s3c24xx/KConfig文件
找到如下代码段:
- config S3C24XX_SPI_BUS0_GPE11_GPE12_GPE13
- bool
- help
- SPI GPIO configuration code for BUS0 when connected to
- GPE11, GPE12 and GPE13.
- config S3C24XX_SPI_BUS1_GPG5_GPG6_GPG7
- bool
- help
- SPI GPIO configuration code for BUS 1 when connected to
- GPG5, GPG6 and GPG7.
修改为
- config S3C24XX_SPI_BUS0_GPE11_GPE12_GPE13
- bool "S3C24XX_SPI_BUS0_GPE11_GPE12_GPE13"
- help
- SPI GPIO configuration code for BUS0 when connected to
- GPE11, GPE12 and GPE13.
- config S3C24XX_SPI_BUS1_GPG5_GPG6_GPG7
- bool "S3C24XX_SPI_BUS1_GPG5_GPG6_GPG7"
- help
- SPI GPIO configuration code for BUS 1 when connected to
- GPG5, GPG6 and GPG7.
- make menuconfig

图2

图3
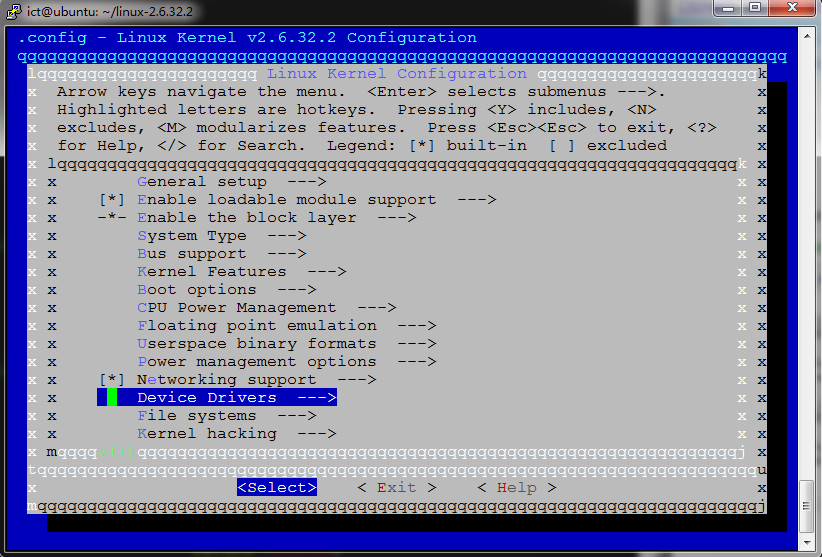
图4

图5

最后编译内核
- make zImage
交叉编译:
- arm-linux-gcc -I ~/linux-2.6.32.2/include/ spidev_test.c
- FF FF FF FF FF FF
- 40 00 00 00 00 95
- FF FF FF FF FF FF
- FF FF FF FF FF FF
- FF FF FF FF FF FF
- DE AD BE EF BA AD
- F0 0D
总结:这里叙述的是驱动移植详细过程,代码的具体含义以及开发板的针脚对应图需要自己去查阅相关资料,这里不再详述。
转载:http://blog.chinaunix.net/uid-23095063-id-3154633.html
第一步:在编译内核make menuconfig时选上进入驱动选项页;


第二步:在驱动选项页里选择SPI,进入SPI页;

第三步:选择上图带*号的选项,保存并退出配置界面;
第四步:修改arch/arm/mach-s3c2440/mach-mini2440.c文件,在include头文件代码行之后增加如下代码
//add spi
#include <linux/spi/spi.h>
#include <mach/spi.h>
static struct spi_board_info s3c2410_spi0_board[] = {
[0] = {
.modalias = "spidev",
.bus_num = 0,
.chip_select = 0,
.irq = IRQ_EINT9,
.max_speed_hz = 500*1000,
},
};
//.pin_cs = S3C2410_GPB1,
static struct s3c2410_spi_info s3c2410_spi0_platdata = {
.pin_cs = S3C2410_GPG2,
.num_cs = 1,
.bus_num = 0,
};
//end add spi
这里需要注意的是片选管脚.pin_cs需要根据自己的硬件实际情况来定义,我的板卡用的是GPG2管脚作为片选。
然后在函数__init mini2440_machine_init的开头增加下列代码
//add spi
s3c_device_spi0.dev.platform_data= &s3c2410_spi0_platdata;
spi_register_board_info(s3c2410_spi0_board, ARRAY_SIZE(s3c2410_spi0_board));
//end spi
第五步:修改drivers/spi/spi_s3c24xx.c文件,在s3c24xx_spi_initialsetup函数结尾增加下列代码
s3c2410_gpio_cfgpin(hw->pdata->pin_cs, S3C2410_GPIO_OUTPUT);
s3c2410_gpio_cfgpin(0x8B, S3C2410_GPIO_SFN2);
s3c2410_gpio_cfgpin(0x8C, S3C2410_GPIO_SFN2);
s3c2410_gpio_cfgpin(0x8D, S3C2410_GPIO_SFN2);
主要是为了防止有些板卡在硬件复位之后2440寄存器没有完全复位成默认值,所以需要手动进行配置;
第六步:用make zImage编译内核。
烧录新内核,板卡起来之后在/dev/目录下会产生一个新的设备文件spidev0.0,这时可以用内核自带的测试程序进行测试,内核测试程序在 Documentation/spi目录下,直接修改并编译spidev_test.c文件即可。测试时可以用一根导线将SPI的out和in两根管脚连 接起来形成环路——自发自收。这个测试程序有几个参数需要注意,
-D,这是让你选择spi设备名,我的是/dev/spidev0.0;
-s,选择速率,单位是Hz,默认是500000,一般可以设到2M;
-H,时钟相位,我的设备要求为1,即时钟信号为高时片选由高到低有效,默认为0,带该参数表示1;
-O,时钟极性,我的设备要求为1,即空闲时时钟信号要保持为高,默认为0,带该参数表示1;
-C,片选置高,我的设备要求0,即片选信号为低时有效,默认为0,带该参数表示1;
其它参数没有用过,不知道什么意思。当然如果是自发自收测试这些参数除了设备名外都可以不设置。
其实SPI的原理很简单,主要有3根线(时钟,数据输入,数据输出),再加一个片选线,时钟始终由master发出,master发送字节的同时会产生时 钟信号,由于slave不能产生时钟,所以为了从slave接收数据,master必须在接收数据时也发送数据(可以为全0)以产生时钟。
我在驱动里是用中断的方式来发送和接收数据的,每发送一个字节数据,产生一次中断,在中断里查看状态寄存器,并读取接收寄存器里的值,然后继续下一个字节的发送,如此循环直到全部发送和接收完毕。
- mini2440 SPI驱动移植 (基于SPI子系统)
- mini2440 SPI驱动移植
- mini2440 SPI驱动移植
- mini2440 SPI驱动移植
- mini2440 SPI驱动移植
- mini2440 SPI驱动移植
- mini2440 SPI驱动移植(转)
- 【转载】mini2440 SPI驱动移植
- mini2440移植之SPI驱动
- Linux中SPI子系统图解和mini2440下的SPI驱动移植
- Linux中SPI子系统图解和mini2440下的SPI驱动移植
- Linux中SPI子系统图解和mini2440下的SPI驱动移植
- MINI2440 -- SPI子系统
- mini2440 spi驱动总结
- RC522 SPI驱动 mini2440
- 基于linux2.6.33 spi驱动移植总结
- Linux2.6.32下SPI驱动的移植(mini2440)
- inux spi子系统驱动分析(续 )
- libncftp
- uiview删除自身先前所有的手势
- Android Camera 使用小结--转载
- VS的ML、MT和MD
- Reading the bytes from a text file using a dispatch I/O channel
- mini2440 SPI驱动移植 (基于SPI子系统)
- 使用gSOAP开发实例(3) iconv解决中文乱码问题
- IOS快速入门-工匠化教程系列(一) Xcode安装和快速认识
- Oracle判断某一天的下一个工作日
- 关于结构体占用空间大小总结
- Xcode升级到5.1& iOS升级到iOS7.1问题:Undefined symbols for architecture x86_64
- jsp九大内置对象
- linux S3C2440 spi 驱动简单测试 (基于简单字符驱动)
- 我还是这样的孩子


