DAVINCI DM365-DM368开发攻略——linux-2.6.32的移植
来源:互联网 发布:进化论被推翻知乎 编辑:程序博客网 时间:2024/06/09 18:52
转载:http://blog.csdn.net/olei_oleitao/article/details/7919966
一、介绍linux-2.6.32:
一、介绍linux-2.6.32:
Linux-2.6.32的网上介绍:增添了虚拟化内存 de-duplicacion、重写了 writeback 代码、改进了 Btrfs 文件系统、添加了 ATI R600/R700 3D 和 KMS 支持、CFQ 低传输延迟时间模式、perf timechart 工具、内存控制器支持 soft limits、支持 S+Core 架构、支持 Intel Moorestown 及其新的固件接口、支持运行时电源管理、以及新的驱动;这些本人不懂,但是本人只注意到常用的LINUX操作系统RADHAT Enterprise 6,ubuntu-10.04,debian 6.0稳定版本,这些都是使用linux-2.6.32这个版本,智能手机就更多了,android手机(经典版本HTC-G7手机使用linux-2.6.32.15和android 2.2版本结合),因为只有从linux-2.6.32以后,才能发挥android系统的优势;不过单核的DM368无论是432MHz还是新出的500多MHz,跑android系统非常困难,只能跑QT,这里不讨论;
本人写内核的环境和路径都是基于前两篇文章的基础上进行的,先从dvsdk_dm368_4_02_00_06\下的Rules.make和Makefile开始,见Rules.make第45行,
LINUXKERNEL_INSTALL_DIR=$(DVSDK_INSTALL_DIR)/psp/linux-2.6.32.17
很明显我们把内核名字改成linux-2.6.32.17,原来解压安装出来的名字太长了,所以要在Rules.make第45行改一下;Makefile是编译的脚本,TI把整个DVSDK4.02的开发环境统一整合在一起,体现在这个Makefile,看完这个Makefile,就应该知道如何编译整个DVSDK里所有的软件包,内核编译的命令见143行开始;在dvsdk_dm368_4_02_00_06\目录下使用make linux,make linux_config, make linux_clean等命令编译内核;
二、开始移植:从删除多余的文件夹和文件开始:
1、dvsdk_dm368_4_02_00_06/psp/linux-2.6.32.17/arch/arm/configs
只保留davinci_dm365_defconfig

图-1
然后按上图-1,先使用默认的config文件进行内核配置,
cp arch/arm/configs/davinci_dm365_defconfig .config
注意路径;
2、删除非ARM芯片平台的处理器
进入dvsdk_dm368_4_02_00_06/psp/linux-2.6.32.17/arch,保留arm,um,x86三个文件夹,其他文件删除掉;
然后进入dvsdk_dm368_4_02_00_06/psp/linux-2.6.32.17/arch/um文件夹,只保留scripts文件夹,其他删除掉,包括那几个文件Kconfig等文件也删除掉;
继续进入dvsdk_dm368_4_02_00_06/psp/linux-2.6.32.17/arch/x86文件夹,只保留include和mm文件夹,和几个文件,其他文件夹删除掉见下图-2:
图-2
继续进入dvsdk_dm368_4_02_00_06/psp/linux-2.6.32.17/arch/arm文件夹,保留mach-davinci文件夹和保留下图的文件夹和文件,其他带mach-删除吧,占空间,又占备份时压缩的时间,
图-3
上图-3就是dvsdk_dm368_4_02_00_06/psp/linux-2.6.32.17/arch/arm目录下删除后的结果显示;
3、修改dvsdk_dm368_4_02_00_06/psp/linux-2.6.32.17/arch/arm/Makefile,
从第120行开始,#machine-$(CONFIG_ARCH_AAEC2000) := aaec2000
一直到172行,
#machine-$(CONFIG_ARCH_MXC91231) := mxc91231
只保留machine-$(CONFIG_ARCH_DAVINCI) := davinci,其他全部使用”#”给屏蔽掉,我们只要machine-$(CONFIG_ARCH_DAVINCI) := davinci
第176行到第184统统使用”#”给屏蔽掉,不要这些芯片平台;
4、修改dvsdk_dm368_4_02_00_06/psp/linux-2.6.32.17/arch/arm/Kconfig
从第707行开始,一直到793行,这些全部使用“#”给屏蔽掉,保留第795行的source "arch/arm/mach-davinci/Kconfig",然后继续把第797到805行使用“#”给屏蔽掉;
经过上面的删除,使用tar jcf 或 tar zcf压缩的linux-2.6.32.17降到51M,比没有删除的减小近一半的大小;我们追求简洁,思路清晰;其实还有很多地方可以删除的,大家慢慢体会,包括include,driver里边的老掉牙的设备,这里就不啰嗦了;删除后记得把对应的Kconfig和Makefile给屏蔽掉;
三、开始从内核配置

图-4
因为前面已经做了cp arch/arm/configs/davinci_dm365_defconfig .config我们按上图指定的路径使用make linux_config,这样就看到熟悉的内核配置界面,见下图-5:
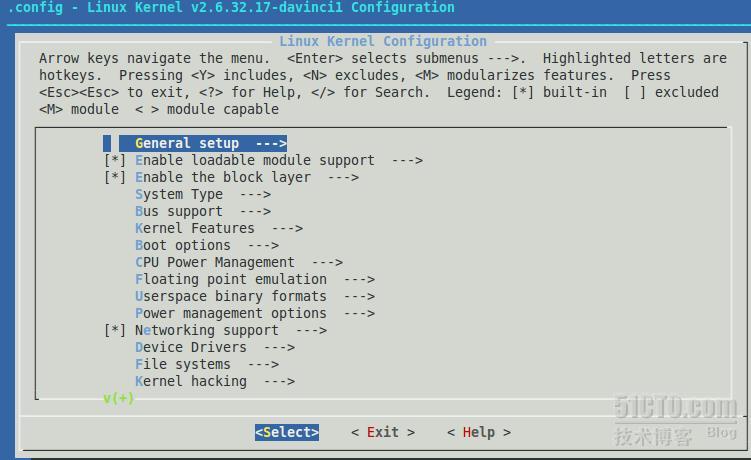
图-5
我们按顺序一个一个配置,当然,很多配置选项都是使用TI davinci_dm365_defconfig配置好的,我们对它们进行分析、裁剪、修改,
进入“General setup”配置
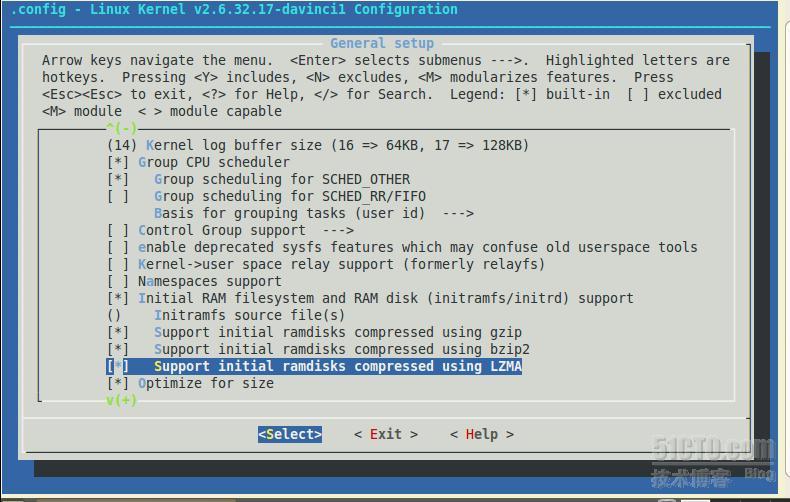
图-6
上图是我们多选了RAM disk文件系统支持的压缩方式,默认是使用gzip生产RAM DISK文件系统,你也可以使用bzip2和LZMA(压缩率比前面两个高);

图-7
进入“System Type”配置,上面按TI 原来的配置,
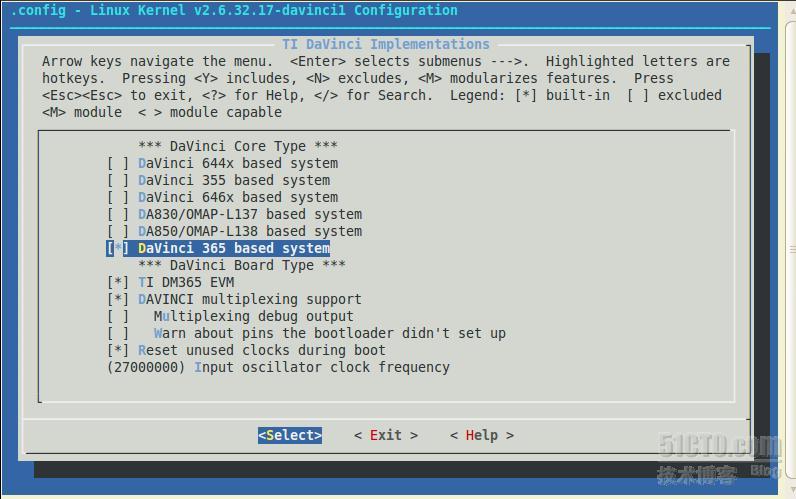
图-8
然后直接进入“TI Davinci Implementations”,按上面的选择,最后面的27000000表示你的主芯片晶振是27MHz还是24MHz,本公司的是24MHz晶振,我们就把27000000改成24000000;
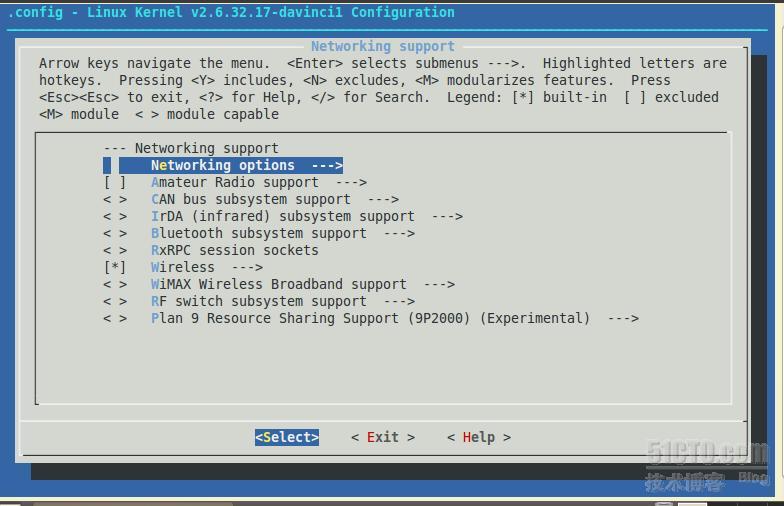
图-9
返回图-5,进入“Networking support”,你的系统如果没有WIFI等无线模块,这个无线的“wireless”协议可以不选;
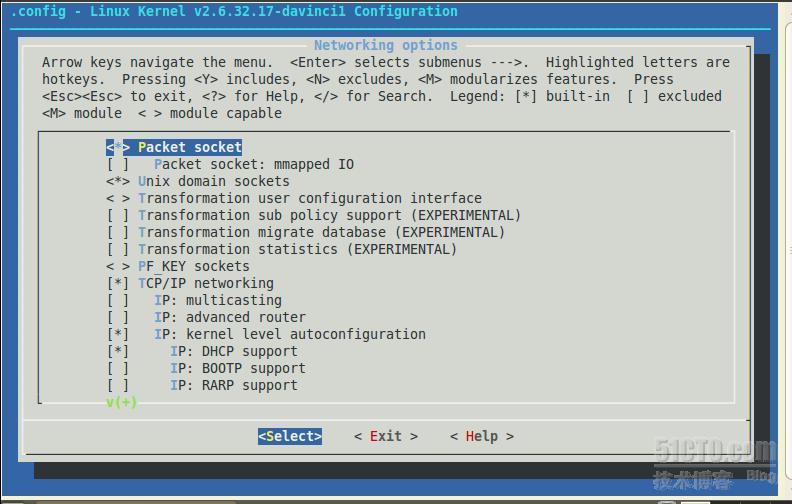
图-10
主要对“Networking options”进行配置,这里基本上就是IPV4和IPV6的协议配置,我们按TI原来的选择,带“M”选项也可以使用“*”编译进内核,而不是模块;
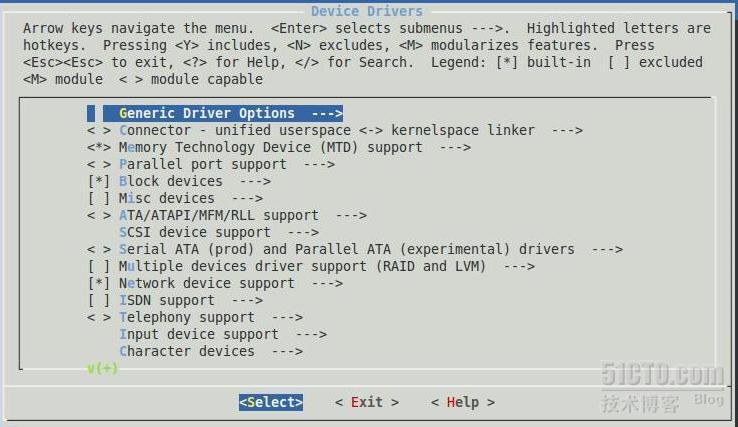
图-11
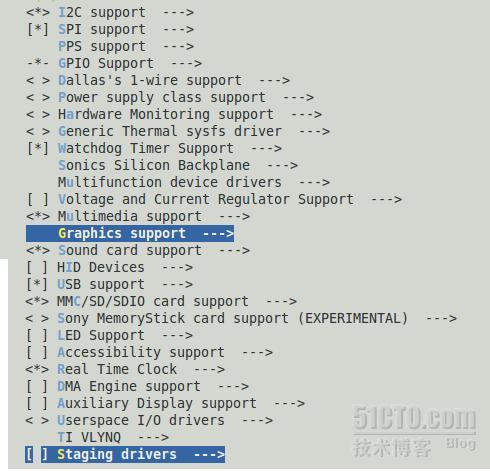
图-12
返回图-5进入“Device Drivers”,这是配置内核的重点,见图-11和图-12,
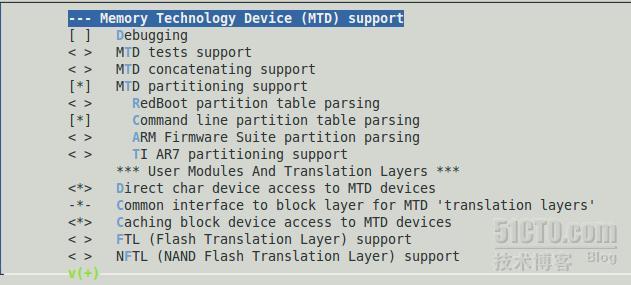
图-13
按顺序先对NAND FLASH分区MTD进行配置,直接参考TI 默认的配置;
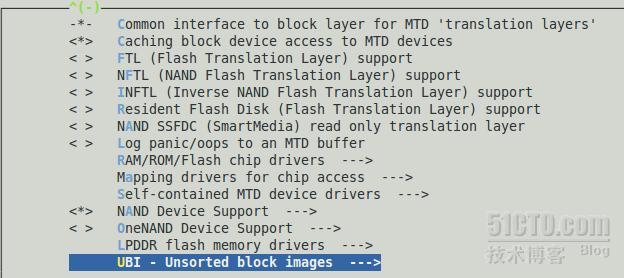
图-14
图-14 RAM/ROM/FLASH及下面3个使用TI默认的配置,
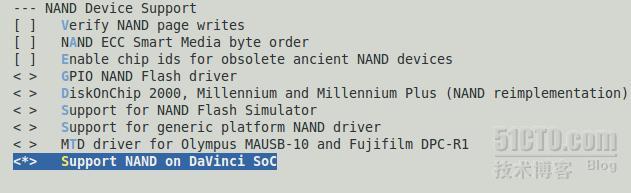
图-15
进入“NAND device Support”的配置,一定要选择“Support NAND on Davinci SoC”,
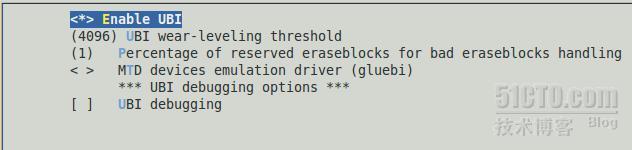
图-16
这是2.6.32新的特性,开始支持UBI文件系统,UBI文件系统的出现,可以让JFFS2,YAFFS2退出市场,跑android系统,必须用到,这里我们可以不选,也可以选,根据你的板子要使用什么样的文件系统;
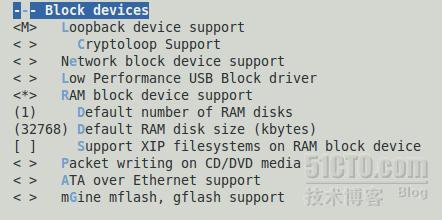
图-17
返回图-11进入“Block devices”配置,我们直接使用TI的配置,
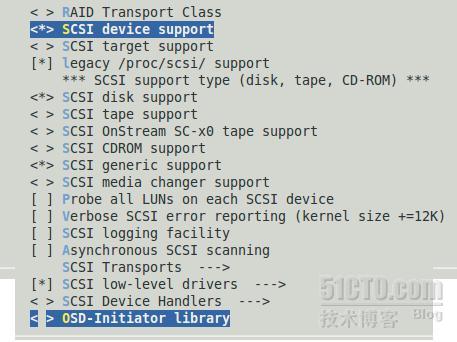
图-18
返回图-11进入“SCSI device support”的配置,选择这个来支持U盘,否则你的U盘无法被DM368板子识别,我们一般把DM368 USB设置HOST模式;
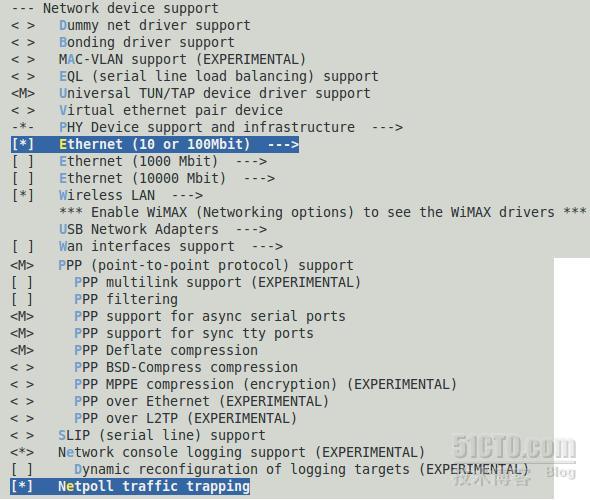
图-19
返回图-11进入“Network device support”的配置,一般的RJ45网口选择“10M or 100Mbit”,DM368不支持1000Mbit,无线“Wireless LAN”你不需要的话可以不选;“PPP”这个可以不选,而有时要支持3G的模块的时候,PPP协议(见图-10的配置)和设备支持要选择;
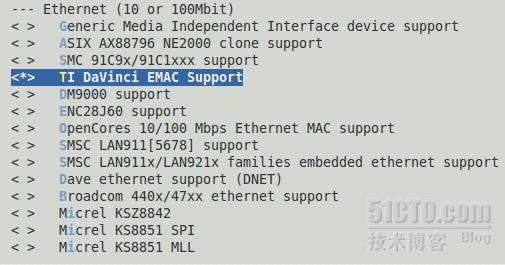
图-20
进入“10M or 100Mbit”,选择“TI Davinci EMAC Support;
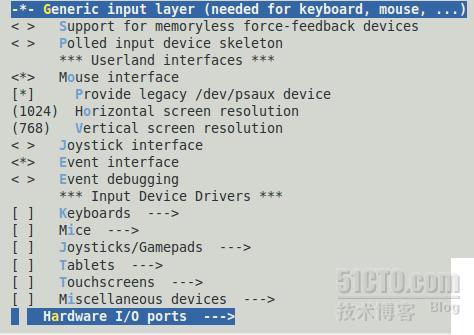
图-21
返回图-11进入“Input device support”,这选择是否支持鼠标键盘触摸屏等输入,我们这边用不上,直接不选;

图-22
返回图-11进入“Char device”,一定要选择DM365 IPIPE,IMP Previewer,IMP Resizer,这个到时候调试视频采集程序需要用到Previewer、Resizer等DAVINCI技术;
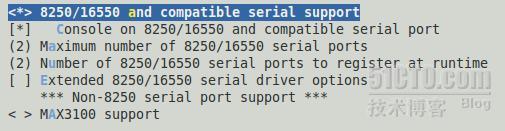
图-23
在图-22中,选择进入“Serial driver”,这里就是DM368的串口配置了,DM368支持UART0 和UART1,UART1和其他GPIO复用,小心分配使用硬件资源,和DM6446一样,都是8250的驱动,而DM6446可以配置3个UART;
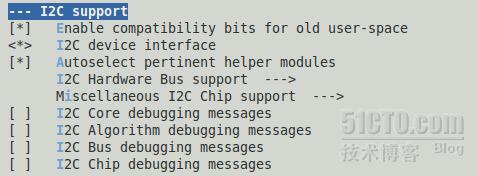
图-24
返回图-11进入“I2C Support”,这个没得说,肯定使用选上的,

图-25
TI开发板使用的I2C扩展芯片,我们不需要,所以External就不要了,只选上“Davinci I2C driver”;
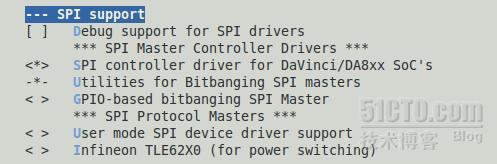
图-26
返回图-11进入“SPI Support”,如果你的板子没有外接SPI接口的芯片,这里可以不选;
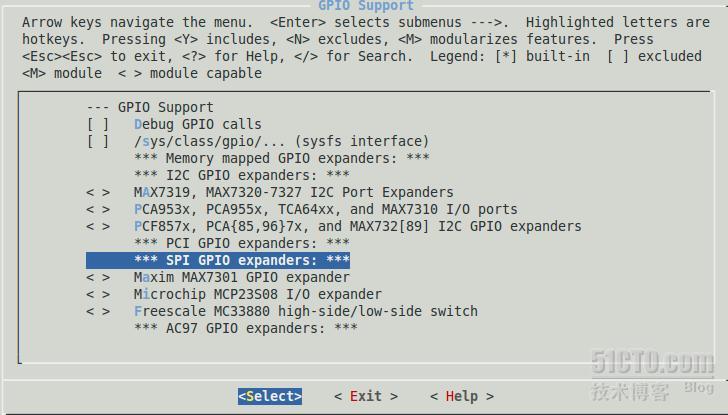
图-27
返回图-11进入“GPIO Support”,TI使用芯片扩展更多的GPIO脚,我们不需要,可以不选;
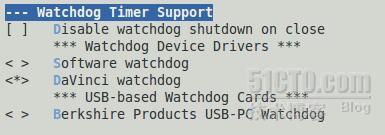
图-28
返回图-11进入“Watchdog Timer Support”,凡是使用软件看门狗的,都需要选上这个,DM368和DM6446这些芯片都支持软件看门狗,注意选择是“Davinci watchdog”;
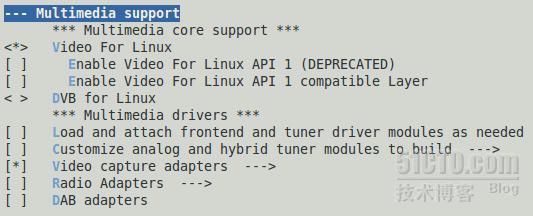
图-29
返回图-11进入 “Multimedia support”,多媒体支持,这个就是Davinci的重点,
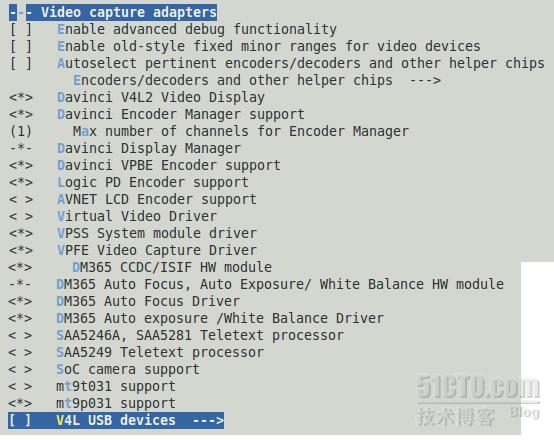
图-30
按TI默认的选择,MT9P031 500万像素的SERSEOR可以选上,你有其他公司的SENSOR,也可以参考MT9P031的方法加入你SENSOR的驱动,然后修改linux-2.6.32.17\drivers\media\video里边的Makefile和Kconfig文件就OK了;
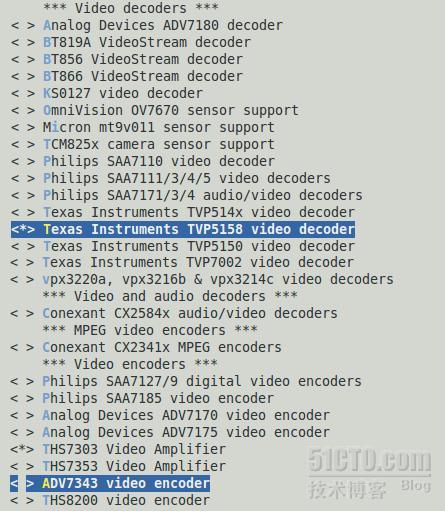
图-31
然后从图-30的“encoders/decoders and xxxx”进去选择TVP5146,高清Ypbpr输出THS7303,TH7353芯片的选择支持,我们公司使用TVP5158,本人把它加入内核编译,所以这里显示TVP5158,TVP7002我们没有使用,所以不用选;
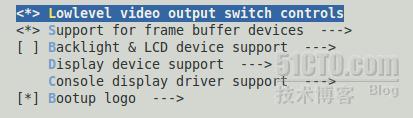
图-32
返回图-11进入“Graphics Suppor”,这个就是选择支持TFT3.5, TFT4.3寸LCD屏的驱动,也就是通过RGB接口支持屏的输出,我板子不支持,可以选择也可以按TI默认的设置;
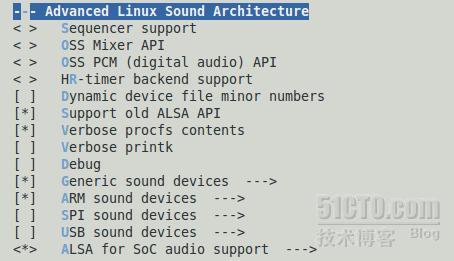
图-33
返回图-11进入“Sound card Suppor”,声卡选择,

图-34
DM368主芯片上带有音频功能的模块,直接按TI的设置,
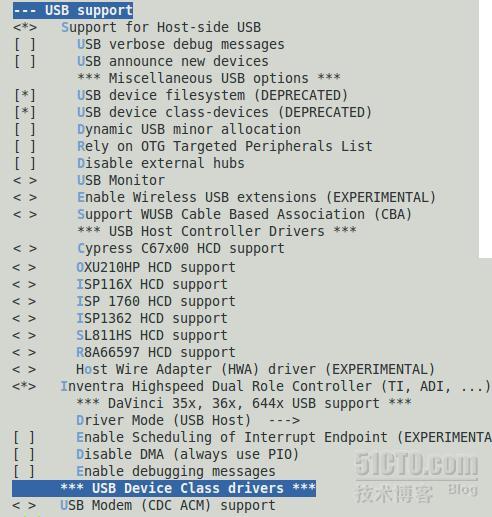
图-35
返回图-11进入“USB Suppor”,我们把DM368跑的LINUX系统当作HOST来使用,“HID Support”是支持鼠标键盘之类的东西,可以选也可以不要;基本上采用TI的默认配置
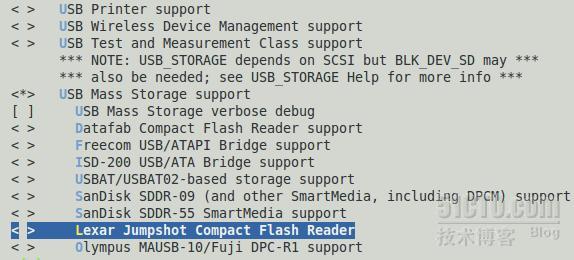
图-36
这里选择支持U盘,这个和前面说过的SCSI Spport是对应的;
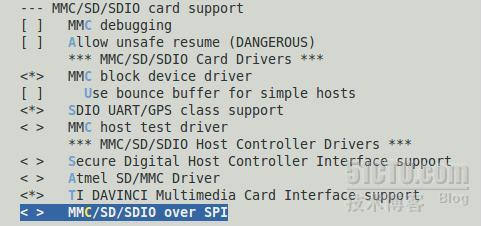
图-37
返回图-11进入“MMC/SD/SDIO Suppor”,linux-2.6.32的SD卡驱动完全支持32G的容量,DM368支持两个SD卡接口0和1,使用SD0基本不需要什么移植,使用SD1内核驱动注意使用SD1卡时,复用的GPIO脚就不需要了;
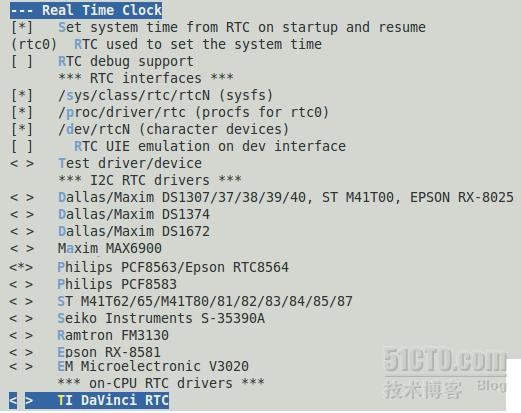
图-38
返回图-11进入“Real Time Clock”,DM368支持片上的RTC时钟,即“TI Davinci RTC”,我们自己的板子支持外部RTC时钟芯片PCF8563,根据外设选择;

图-39
返回图-5进入“File systems”,对需要支持的文件系统进行选择,选择EXT2/EXT3/EXT4文件系统是在断电对存储设备保护和日志恢复的情况下,比FAT32好多了,比如把SD卡格式化成EXT3/EXT4比FAT32更好用;
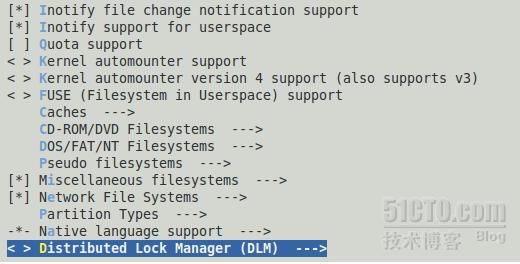
图-40
其他保留TI的配置,

图-41
进入“DOS/FAT/NT”文件系统的支持,按上面的选择,NTFS没有用过,不知在嵌入式是否好用,这里选择的目的是能够使用U盘等等存储设备;
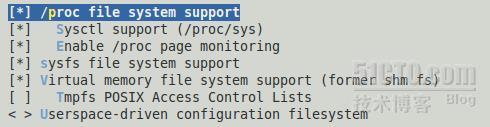
图-42
进入“Pseudo filesystems”,保留TI的默认配置;

图-43

图-44
进入“Miscellaneous filesystems”,配置NAND FLASH支持的文件系统,YAFFS2的文件系统是本人下载然后按patch就行移植的,TI原来没有,选择YAFF2,JFFS2,还有cramfs,SquashFS,UBI文件系统目前没有验证,有时间再试试,刚才提到的都是最常用的嵌入式NAND文件系统,就是要烧进NAND FLASH的;

图-45
图-45就是NFS文件系统的设置,我们在板子上运行的是NFS client模式,即客户端,而开发环境是NFS SERVER端;里边的SMB(SAMBA)在板子上不需要支持,我们去掉不选;
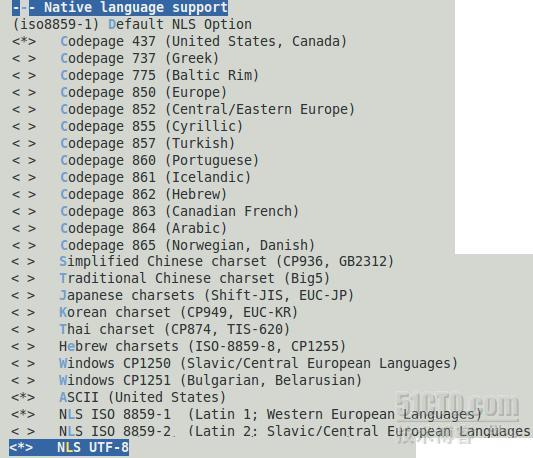
图-46
图-46就是选择内核支持的语言;
然后备份配置:在dvsdk_dm368_4_02_00_06目录下
#cp psp/linux-2.6.32.17/.config psp/linux-2.6.32.17/dm368_20111227.config
注意路径,凡是使用make distclean和make linux_clean命令后,.config不存在,这时我们就必须使用:
#cp psp/linux-2.6.32.17/dm368_20111227.config psp/linux-2.6.32.17/.config注意.config的“.”,这样整个内核配置基本结束;
四、分析和修改代码:
1、mach-davinci\board-dm365-evm.c
这个是DM368内核移植重点的地方,系统初始化函数都在这里,而外部设备初始化在各自的驱动文件里;打开第156行 #define NAND_BLOCK_SIZE SZ_128K
同时屏蔽/*#define NAND_BLOCK_SIZE SZ_512K*/ 这个是4K-PAGE NAND FLASH
因为我们公司的板子都是使用2K-PAGE的NAND FLASH,512字节的NAND不适合新的文件系统,慢慢会被淘汰;
修改NAND FLASH的分区,
static struct mtd_partition davinci_nand_partitions[] = {
{
/* UBL (a few copies) plus U-Boot */
.name = "bootloader",
.offset = 0x80000,
.size = 3 * NAND_BLOCK_SIZE,
.mask_flags =0,
/* tongye:.mask_flags = MTD_WRITEABLE, *//* force read-only */
}, {
/* U-Boot environment */
.name = "params",
.offset = 0xe0000,
.size = 1 * NAND_BLOCK_SIZE,
.mask_flags = 0,
}, {
.name = "kernel",
.offset = 0x100000,
.size = SZ_4M+SZ_512K,
.mask_flags = 0,
}, {
.name = "basefs",
.offset = 0x100000+SZ_4M+SZ_512K,
.size = SZ_32M-SZ_4M,
.mask_flags = 0,
/* tongye:28M-byte for ramdisk,cramfs,squashfs rootfs*/
}, {
.name = "userfs",
.offset = 0x100000+SZ_32M+SZ_512K,
.size = SZ_64M+SZ_16M,
.mask_flags = 0,
/*tongye:80M-byte for jffs2,yaffs2 rootfs*/
}, {
.name = "userdata",
.offset = SZ_64M+SZ_32M+SZ_16M+SZ_1M+SZ_512K,
.size = 0x8000000-SZ_64M-SZ_32M-SZ_16M-SZ_1M-SZ_512K,
.mask_flags = 0,
}
/* two blocks with bad block table (and mirror) at the end */
};
UBL的代码放在0x20000~0x40000的位置,一般NAND FLASH前面5个BLOCK出现坏块的几率非常小,在产品中一般很少去维护更新UBL,所以没有把UBL单独分一个分区;而其他空间出现坏块的几率比较大,所以给U-BOOT分3~4个BLOCK够用了,内核分5M-BYTE也够用,而U-BOOT参数分1~2个BLOCK,本公司直接放到0x60000~0x80000的空间也可以,没有规定;后面的文件系统分区就根据你裁剪的文件系统、文件系统的类型进行大小分区;
static struct i2c_board_info i2c_info[] = {
/* {
I2C_BOARD_INFO("dm365evm_keys", 0x25),
},
{
I2C_BOARD_INFO("24c256", 0x50),
.platform_data = &eeprom_info,
},
*/
{
I2C_BOARD_INFO("tlv320aic3x", 0x18),
},
{
I2C_BOARD_INFO("ths7303", 0x2c),
},
/*{
I2C_BOARD_INFO("PCA9543A", 0x73),
},*/
{
I2C_BOARD_INFO("pcf8563", 0x51),
},
};
上面这个结构就是看看你的I2C总线带什么样的设备,根据你的I2C设备地址,添加到这里,这样才能调用到设备初始化函数;从上面的修改看出,我们的板子不需要AT24C256这些EEPROM芯片,可以干掉;
static void dm365evm_reset_imager(int rst)
{
u8 val;
//tongye
#if 0
val = __raw_readb(cpld + CPLD_POWER) | BIT(3) | BIT(11) | BIT(19) | BIT(27);
__raw_writeb(val, (cpld + CPLD_POWER));
val = __raw_readb(cpld + CPLD_MUX) | BIT(6) | BIT(14) | BIT(22) | BIT(30);
__raw_writeb(val, (cpld + CPLD_MUX));
/* Reset bit6 of CPLD_IMG_DIR2 */
val = __raw_readb(cpld + CPLD_IMG_DIR2) & ~BIT(6);
__raw_writeb(val, (cpld + CPLD_IMG_DIR2));
/* Set bit5 of CPLD_IMG_MUX5 */
val = __raw_readb(cpld + CPLD_IMG_MUX5) | BIT(5);
__raw_writeb(val, (cpld + CPLD_IMG_MUX5));
/* Reset bit 0 of CPLD_IMG_MUX5 */
val = __raw_readb(cpld + CPLD_IMG_MUX5) & ~BIT(0);
__raw_writeb(val, (cpld + CPLD_IMG_MUX5));
#endif
/**
* Configure GPIO40 to be output and high. This has dependency on MMC1
*/
#if 1
davinci_cfg_reg(DM365_PWM3_G85);
davinci_cfg_reg(DM365_PWM3_G86);
gpio_request(85, "sensor_reset");
gpio_request(86, "sensor_standby");
gpio_direction_output(85, 0);
gpio_direction_output(86, 0);
gpio_set_value(85,1);
gpio_set_value(86,1);
mdelay(15); 头文件要加上#include <linux/delay.h>
gpio_set_value(85,0);
gpio_set_value(86,0);
mdelay(25);
gpio_set_value(85,1);
gpio_set_value(86,1);
mdelay(25);
#else
davinci_cfg_reg(DM365_GPIO40);
gpio_request(40, "sensor_reset");
if (rst)
gpio_direction_output(40, 1);
else
gpio_direction_output(40, 0);
#endif
}
上面的函数修改:我们不需要CPLD,所以屏蔽掉,我们直接使用GPIO控制MT9P031 SENSOR的复位和STANDBY信号;
static struct vpfe_subdev_info vpfe_sub_devs[] = {
{
.module_name = "tvp5158",
.grp_id = VPFE_SUBDEV_TVP5146,
.num_inputs = ARRAY_SIZE(tvp5158_inputs),
.inputs = tvp5158_inputs,
.routes = tvp5158_routes,
.can_route = 1,
.ccdc_if_params = {
.if_type = VPFE_BT656,
.hdpol = VPFE_PINPOL_POSITIVE,
.vdpol = VPFE_PINPOL_POSITIVE,
},
.board_info = {
I2C_BOARD_INFO("tvp5158", 0x5B),
.platform_data = &tvp5158_pdata,
},
},
{
.module_name = "tvp7002",
.grp_id = VPFE_SUBDEV_TVP7002,
.num_inputs = ARRAY_SIZE(tvp7002_inputs),
.inputs = tvp7002_inputs,
.ccdc_if_params = {
.if_type = VPFE_BT1120,
.hdpol = VPFE_PINPOL_POSITIVE,
.vdpol = VPFE_PINPOL_POSITIVE,
},
.board_info = {
I2C_BOARD_INFO("tvp7002", 0x5c),
.platform_data = &tvp7002_pdata,
},
},
{
.module_name = "ths7353",
.grp_id = VPFE_SUBDEV_TVP7002,
.board_info = {
I2C_BOARD_INFO("ths7353", 0x2e),
},
},
{
.module_name = "mt9p031",
.is_camera = 1,
.grp_id = VPFE_SUBDEV_MT9P031,
.num_inputs = ARRAY_SIZE(mt9p031_inputs),
.inputs = mt9p031_inputs,
.ccdc_if_params = {
.if_type = VPFE_RAW_BAYER,
.hdpol = VPFE_PINPOL_POSITIVE,
.vdpol = VPFE_PINPOL_POSITIVE,
},
.board_info = {
I2C_BOARD_INFO("mt9p031", 0x48),
/* this is for PCLK rising edge */
.platform_data = (void *)1,
},
}
};
TI的DM368开发板同时支持TVP5146、TVP7002、MT9P031;TVP5146代表标清复合视频输入采集芯片(D1格式),TVP7002代表复合视频YPbPr的高清输入采集芯片,MT9P031代表500万像素的SENSOR采集;
/* Set the input mux for TVP7002/TVP5146/MTxxxx sensors */
static int dm365evm_setup_video_input(enum vpfe_subdev_id id)
{
const char *label;
u8 mux, resets;
//Jingbo
/////mux = __raw_readb(cpld + CPLD_MUX);
////mux &= ~CPLD_VIDEO_INPUT_MUX_MASK;
////resets = __raw_readb(cpld + CPLD_RESETS);
switch (id) {
case VPFE_SUBDEV_TVP5146:
mux |= CPLD_VIDEO_INPUT_MUX_TVP5146;
resets &= ~BIT(0);
label = "tvp5158 SD";
dm365evm_reset_imager(0);
break;
case VPFE_SUBDEV_MT9P031:
mux |= CPLD_VIDEO_INPUT_MUX_IMAGER;
resets |= BIT(0); /* Put TVP5146 in reset */
label = "HD imager";
dm365evm_reset_imager(1);
/* Switch on pca9543a i2c switch */
////if (have_imager())
////dm365evm_enable_pca9543a(1);
break;
case VPFE_SUBDEV_TVP7002:
resets &= ~BIT(2);
mux |= CPLD_VIDEO_INPUT_MUX_TVP7002;
label = "tvp7002 HD";
break;
default:
return 0;
}
////__raw_writeb(mux, cpld + CPLD_MUX);
////__raw_writeb(resets, cpld + CPLD_RESETS);
pr_info("EVM: switch to %s video input\n", label);
return 0;
}
上面的函数去掉CPLD的东西,这个视频采集芯片的选择是和U-BOOT的参数一一对应的,在U-BOOT bootargs的参数里,加入davinci_capture.device_type=0表示使用TVP5146采集,davinci_capture.device_type=1表示使用MT9P031采集,davinci_capture.device_type=2表示使用TVP7002采集,内核读取U-BOOT的参数,会在初始化确定是否调用什么样的采集芯片驱动;所以我们在内核配置的时候,可以同时选上三种芯片;
static void __init evm_init_i2c(void)
{
davinci_init_i2c(&i2c_pdata);
#if 0
if (have_imager())
i2c_add_driver(&pca9543a_driver);
#endif
i2c_register_board_info(1, i2c_info, ARRAY_SIZE(i2c_info));
}
这个pca9543a I2C切换芯片我们不需要;
static void __init evm_init_cpld(void)
{
u8 mux, resets;
const char *label;
struct clk *aemif_clk;
struct davinci_soc_info *soc_info = &davinci_soc_info;
/* Make sure we can configure the CPLD through CS1. Then
* leave it on for later access to MMC and LED registers.
*/
aemif_clk = clk_get(NULL, "aemif");
if (IS_ERR(aemif_clk))
return;
clk_enable(aemif_clk);
#if 0
if (request_mem_region(DM365_ASYNC_EMIF_DATA_CE1_BASE, SECTION_SIZE,
"cpld") == NULL)
goto fail;
cpld = ioremap(DM365_ASYNC_EMIF_DATA_CE1_BASE, SECTION_SIZE);
if (!cpld) {
release_mem_region(DM365_ASYNC_EMIF_DATA_CE1_BASE,
SECTION_SIZE);
fail:
pr_err("ERROR: can't map CPLD\n");
clk_disable(aemif_clk);
return;
}
/* External muxing for some signals */
mux = 0;
/* Read CPLD version number */
soc_info->cpld_version = __raw_readb(cpld + CPLD_VERSION);
/* Read SW5 to set up NAND + keypad _or_ OneNAND (sync read).
* NOTE: SW4 bus width setting must match!
*/
if ((__raw_readb(cpld + CPLD_SWITCH) & BIT(5)) == 0) {
/* external keypad mux */
mux |= BIT(7);
platform_add_devices(dm365_evm_nand_devices,
ARRAY_SIZE(dm365_evm_nand_devices));
} else {
/* no OneNAND support yet */
}
/* Leave external chips in reset when unused. */
resets = BIT(3) | BIT(2) | BIT(1) | BIT(0);
/* ... and ENET ... */
dm365evm_emac_configure();
soc_info->emac_pdata->phy_mask = DM365_EVM_PHY_MASK;
soc_info->emac_pdata->mdio_max_freq = DM365_EVM_MDIO_FREQUENCY;
resets &= ~BIT(3);
/* ... and AIC33 */
resets &= ~BIT(1);
/* Static video input config with SN74CBT16214 1-of-3 mux:
* - port b1 == tvp7002 (mux lowbits == 1 or 6)
* - port b2 == imager (mux lowbits == 2 or 7)
* - port b3 == tvp5146 (mux lowbits == 5)
*
* Runtime switching could work too, with limitations.
*/
if (have_imager()) {
label = "HD imager";
mux |= CPLD_VIDEO_INPUT_MUX_IMAGER;
/* externally mux MMC1 to imager */
mux |= BIT(6);
dm365evm_reset_imager(1);
} else {
/* we can use MMC1 ... */
dm365evm_mmc_configure();
davinci_setup_mmc(1, &dm365evm_mmc_config);
if (have_tvp7002()) {
mux |= CPLD_VIDEO_INPUT_MUX_TVP7002;
resets &= ~BIT(2);
label = "tvp7002 HD";
} else {
/* default to tvp5146 */
mux |= CPLD_VIDEO_INPUT_MUX_TVP5146;
resets &= ~BIT(0);
label = "tvp5158 SD";
dm365evm_reset_imager(0);
}
}
__raw_writeb(mux, cpld + CPLD_MUX);
__raw_writeb(resets, cpld + CPLD_RESETS);
#else
platform_add_devices(dm365_evm_nand_devices,
ARRAY_SIZE(dm365_evm_nand_devices));
/* ... and ENET ... */
dm365evm_emac_configure();
soc_info->emac_pdata->phy_mask = DM365_EVM_PHY_MASK;
soc_info->emac_pdata->mdio_max_freq = DM365_EVM_MDIO_FREQUENCY;
//if (have_imager())
{
dm365evm_reset_imager(1);
//pr_info("EVM: reset mt9p031 imager\n");
}
//pr_info("EVM: %s video input\n", label);
#endif
/* REVISIT export switches: NTSC/PAL (SW5.6), EXTRA1 (SW5.2), etc */
}
上面的函数很重要,除去掉CPLD的东西外,一定要把
platform_add_devices(dm365_evm_nand_devices,
ARRAY_SIZE(dm365_evm_nand_devices));
保留,否则你的内核启动的时候,根本没有NAND的驱动和分区显示;
dm365evm_emac_configure();也肯定要的,否则没有网络驱动叫LINUX吗?TI就是通过CPLD来控制一些外设,CPLD比较贵,不适合低成本大批量生产,所以我们去掉了;
static __init void dm365_evm_init(void)
{
dm365evm_gpio_configure(); //tongye:copy it here
evm_init_i2c();
davinci_serial_init(&uart_config);
dm365evm_emac_configure();
dm365evm_usb_configure();
davinci_setup_mmc(0, &dm365evm_mmc_config);
/* maybe setup mmc1/etc ... _after_ mmc0 */
evm_init_cpld();
dm365_init_asp(&dm365_evm_snd_data);
//dm365_init_rtc();
//dm365_init_ks(&dm365evm_ks_data);
//dm365_init_spi0(BIT(0), dm365_evm_spi_info,
//ARRAY_SIZE(dm365_evm_spi_info));
//dm365_init_tsc2004();
dm365evm_gpio_configure();
}
这个函数就是对MMC/SD、USB、等接口进行初始化了,tsc2004这个是触摸屏的芯片,dm365evm_gpio_configure()里边我们添加了很多GPIO的初始值定义;
2、修改mach-davinci\dm365.c
这个要和arch\arm\mach-davinci\include\mach\mux.h配合看,
好好看看mux_config dm365_pins这个定义,这个DM368的管脚复用非常复杂,使能某个功能,那么对应的另外的功能就不能用了,因此要非常小心对待,特别是和GPIO复用;
后面这些源码介绍就是提示和分析了:
drivers\char\里有dm365_ipipe.c
、imp_common.c、imp_previewer.c、imp_resizer.c、等文件;
drivers\i2c\busses\里有i2c-davinci.c
重点介绍:drivers\media\video\里有V4L2的接口驱动;
drivers\media\video\mt9p031.c,tvp514x.c,tvp7002.c;
drivers\media\video\davinci\里东西就很多了,dm365_ccdc.c、vpfe_capture.c
drivers\net\里有davinci_emac.c
drivers\usb\musb\里davinci.c
GPIO的使用,一直没有搞清楚这个新内核为什么老是隔段时间对U盘复位,和2.6.18不一样,搞得U盘一直成功列举设备,然后用重新复位分配新USB DEVIDE 地址;
drivers\watchdog\里有davinci_wdt.c
第32行#define DEFAULT_HEARTBEAT 2 //tongye removed 60s
应用程序只有一使用open打开设备,WDG就生效,2秒钟不喂狗就软件复位;
linux-2.6.32.17\sound\soc\codecs有tlv320aicxx.c等音频芯片驱动;
linux-2.6.32.17sound\soc\davinci里有PCM、I2S等驱动;
接显示屏drivers\video\davincifb.c,这个要和drivers\media\video\davinci\的vpbe_encoder.c、davinci_display.c、davinci_osd.c啊等等VPBE接口的文件对应;
最后在dvsdk_dm368_4_02_00_06目录下加个编译脚本build_linux.sh:
#!/bin/sh
make linux
chmod 777 /home/davinci/dm368/dvsdk_dm368_4_02_00_06/psp/linux-2.6.32.17/arch/arm/boot/uImage
cp -f /home/davinci/dm368/dvsdk_dm368_4_02_00_06/psp/linux-2.6.32.17/arch/arm/boot/uImage /tftpboot/dm368_kernel.bin
直接./ build_linux.sh,就可以在/tftpboot的目录下得到dm368_kernel.bin,在板子上,通过U-BOOT烧写内核,先调试通NFS,在上篇U-BOOT的移植文章介绍到U-BOOT的NFS参数定义,这里不啰嗦;
好了,linux-2.6.32移植就到此结束,基本上本人目前只调试通TVP5158 单路D1(720*576)图像采集和压缩,验证我们的核心板OK就行了,等软件工程师调试通1080p才发布新的开发板,因为DM368方案不是我们的开发重点;
现在内核版本更新非常快,我们只需要挑稳定的版本来做产品,不要疯狂跟风,虽然TI已经推出linux-2.6.37的版本,但是做产品还是选定一个稳定而又比较新的版本;Linux-2.6.18有些落后了,但在中国,目前绝大部分公司还是使用dvsdk_2_10_01_18的版本,这里边使用的就是Linux-2.6.18的内核;这种局面是中国的通病,因为我们国家没有自己的主芯片(没错,说严重一点,空壳,跟那些空置率超过%70的房地产一样;将来过段时间,没有做为的话,估计连粮食的BT基因片段(转基因)都是人家控制的),很多东西都是被人家拖着鼻子走,人家技术发展很快,觉得这种升级很自然,而我们却觉得这种升级是跳跃,很多公司没精力去更新技术;就比如DM642,这个2005年就已经出来的大功耗+低扩展功能芯片,现在竟然还是TI在中国最多出货的图像处理芯片,很多公司根本不理你什么双核DM6446,OMAP3730,DM6467T,DM8168,CA8168,多核的C667X,他们觉得一个CCS3.X的版本就满足开发做产品了,懒得更新技术,哪怕DM6446性价比更高;时间不等人,不单单软件版本更新快,主芯片更新的速度也非常快,现在流行ARM Cortex-A8和ARM Cortex-A9,然后TI 推出ARM Cortex-A8+浮点DSP,高通公司QCOM推出更低功耗的ARM Cortex-A9+DSP(华为,中兴,HTC的新智能手机使用的主芯片)等等,三星也推出ARM Cortex-A9的主芯片,低功耗+丰富功能是主流;
前面说过DM368不是我们的开发重点,我们更关心那些更强大功能的ARM+DSP的芯片,因为那些芯片才适合做出创新的产品;现在国内高级一点的公司就是自己做ARM+FPGA的方案,因为FPGA无外乎就是Xilinx(赛灵思,或赛玲丝,搞笑一点)为代表的SoPC;更高级的公司比如华为海思(华为是母公司,台湾海思被收购),做自己ARM方案芯片,在海思流片,现在满大街的中低端安防产品(DVR,IP-CAMERA,DVS等等)都是华为海思Hi35XX芯片,由于这种芯片做不了智能图像分析,机器视觉产品,所以我们也没有去开发,等有机会和资本再去玩玩,毕竟华为海思的芯片也在不断升级;龙芯的MIPS架构就不要提了,直接让意法半导体流片了(本来想说流X的,算了,我们反正都被忽悠和被折腾麻木了),人家意法半导体那%5专利的MIPS指令是无法逾越的,还有,我们根本没有高精度的机床,高级的半导体加工技术;
2012注定是不平凡的一年,因为大经济环境更恶劣了,欧洲最先出大问题,中国的危机来了,危机时期最好用来做内功,而不是挥刀自宫,NB的人把“危”当作“机”,NC的人注定随波逐流,没有危机意识,没有思想,也不敢想,更不要谈去做了;而好大喜功的折腾,注定跌进深渊;科技在发展,世界在发展,而现在还出现一大批要返回过去时代的人,这真的是无药可救了;还有更搞笑的菜刀实名制,这又是一个荒唐的极端;都是倒退;
啰嗦的话就不多说了,网友觉得linux-2.6.32移植对你有参考价值,就帮忙顶一下;还有那些转载的朋友不要把文章开始的51cto的信息给去掉,本人发觉某个TI中文网站收录的本人的几篇文章放到他们论坛去,就去掉本人的博客信息,太不够职业道德了;
<script>window._bd_share_config={"common":{"bdSnsKey":{},"bdText":"","bdMini":"2","bdMiniList":false,"bdPic":"","bdStyle":"0","bdSize":"16"},"share":{}};with(document)0[(getElementsByTagName('head')[0]||body).appendChild(createElement('script')).src='http://bdimg.share.baidu.com/static/api/js/share.js?v=89860593.js?cdnversion='+~(-new Date()/36e5)];</script>
阅读(251) | 评论(0) | 转发(0) | 0
上一篇:MTD Utilities
下一篇:DAVINCI DM365-DM368开发攻略——开发环境搭建(DVSDK4.02)
相关热门文章
- linux 常见服务端口
- 【ROOTFS搭建】busybox的httpd...
- xmanager 2.0 for linux配置
- 什么是shell
- linux socket的bug??
- 请问Linux默认shell的是什么 ...
- 谁能够帮我解决LINUX 2.6 10...
- 现在的博客积分不会更新了吗?...
- shell怎么读取网页内容...
- ssh等待连接的超时问题...
给主人留下些什么吧!~~
评论热议
0 0
- davinci DM365-DM368开发攻略—linux-2.6.32移植
- DAVINCI DM365-DM368开发攻略——linux-2.6.32的移植
- DAVINCI DM365-DM368开发攻略——linux-2.6.32的移植
- DAVINCI DM365-DM368开发攻略——linux-2.6.32的移植
- DAVINCI DM365-DM368开发攻略——linux-2.6.32的移植
- DAVINCI DM365-DM368开发攻略——linux-2.6.32的移植
- DAVINCI DM365-DM368开发攻略——linux-2.6.32的移植
- DAVINCI DM365-DM368开发攻略——linux-2.6.32的移植
- DAVINCI DM365-DM368开发攻略——linux-2.6.32的移植
- DAVINCI DM365-DM368开发攻略——U-BOOT-2010.12及UBL的移植
- DAVINCI DM365-DM368开发攻略——U-BOOT-2010.12及UBL的移植
- DAVINCI DM365-DM368开发攻略——U-BOOT-2010.12及UBL的移植
- DAVINCI DM365-DM368开发攻略——U-BOOT-2010.12及UBL的移植
- DAVINCI DM365-DM368开发攻略——U-BOOT-2010.12及UBL的移植
- DAVINCI DM365-DM368开发攻略——U-BOOT-2010.12及UBL的移植
- DAVINCI DM365-DM368开发攻略——U-BOOT-2010.12及UBL的移植
- DAVINCI DM365-DM368开发攻略——U-BOOT-2010.12及UBL的移植
- DAVINCI DM365-DM368开发攻略——U-BOOT-2010.12及UBL的移植
- 文件系统 之 移植mtd-utils工具包
- MTK6276拨号建立数据连接后如何中断
- MTD Utilities
- Java String intern()方法
- 正确理解UNICODE UTF-8等编码方式
- DAVINCI DM365-DM368开发攻略——linux-2.6.32的移植
- DAVINCI DM365-DM368开发攻略——开发环境搭建(DVSDK4.02)
- DAVINCI DM365-DM368开发攻略—U-boot-2010.12-rc2-psp03.01.01.39及UBL的移植 .
- tar命令
- 第十七周项目6-学生成绩统计(4)
- 内核打补丁
- css3制作小三角和镂空样式的小三角
- 关于Tor比较全面的讲解
- 如何在远程桌面的机器上访问自己本地硬盘

原创粉丝点击
热门IT博客


热门问题
老师的惩罚
人脸识别
我在镇武司摸鱼那些年
重生之率土为王
我在大康的咸鱼生活
盘龙之生命进化
天生仙种
凡人之先天五行
春回大明朝
姑娘不必设防,我是瞎子
金银花露
金银错
金银花图片
金银花茶
金银木
高金银
金银首饰
金银价格
金银卡
金银卡印刷
金银加工
金银交易
金银细软
金银卡盒
金银馒头
金银纸批发
金银回收店
金银天下
金银品牌
金银卡集团
金银潭
金银玉米
定制金银章
金银锦盒
金银玲
金银草
金银米饭
金银树
金银豆腐
金银期货
有才金银
父欲y金银花露作品
神级女婿何金银
复方金银花颗粒
神级女婿何金银江雪
神级女婿何金银免费
金银花的功效
上门神豪何金银
金银花露作品
神级女胥何金银
国际金银实时行情全天