四元数和欧拉角之间的转换
来源:互联网 发布:flash for mac破解版 编辑:程序博客网 时间:2024/05/16 03:20
在3D图形学中,最常用的旋转表示方法便是四元数和欧拉角,比起矩阵来具有节省存储空间和方便插值的优点。本文主要归纳了两种表达方式的转换,计算公式采用3D笛卡尔坐标系:
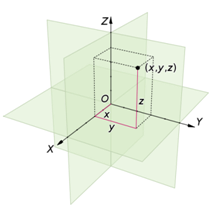
图1 3D Cartesian coordinate System (from wikipedia)
定义 分别为绕Z轴、Y轴、X轴的旋转角度,如果用Tait-Bryan angle表示,分别为Yaw、Pitch、Roll。
分别为绕Z轴、Y轴、X轴的旋转角度,如果用Tait-Bryan angle表示,分别为Yaw、Pitch、Roll。
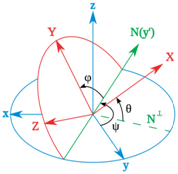
图2 Tait-Bryan angles (from wikipedia)
一、四元数的定义
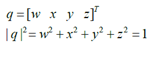
通过旋转轴和绕该轴旋转的角度可以构造一个四元数:
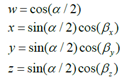
其中 是绕旋转轴旋转的角度,
是绕旋转轴旋转的角度, 为旋转轴在x,y,z方向的分量(由此确定了旋转轴)。
为旋转轴在x,y,z方向的分量(由此确定了旋转轴)。
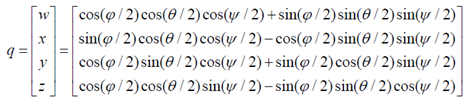
二、欧拉角到四元数的转换
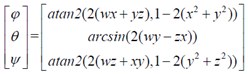
三、四元数到欧拉角的转换
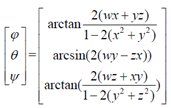
arctan和arcsin的结果是 ,这并不能覆盖所有朝向(对于
,这并不能覆盖所有朝向(对于 角
角 的取值范围已经满足),因此需要用atan2来代替arctan。
的取值范围已经满足),因此需要用atan2来代替arctan。
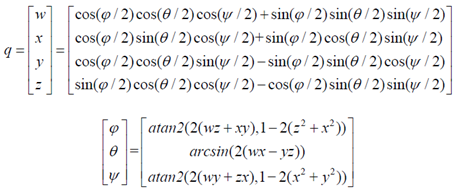
四、在其他坐标系下使用
在其他坐标系下,需根据坐标轴的定义,调整一下以上公式。如在Direct3D中,笛卡尔坐标系的X轴变为Z轴,Y轴变为X轴,Z轴变为Y轴(无需考虑方向)。
0 0
- 四元数和欧拉角之间的转换
- 四元数,欧拉角和旋转矩阵之间的互相转换
- 四元数,欧拉角和旋转矩阵之间的互相转换
- 四元数与欧拉角之间的转换
- 四元数与欧拉角之间的转换
- 四元数与欧拉角之间的转换
- 四元数与欧拉角之间的转换
- 四元数与欧拉角之间的转换
- 四元数与欧拉角之间的转换
- 四元数与欧拉角之间的转换
- 四元数与欧拉角之间的转换
- 四元数与欧拉角之间的转换
- 四元数与欧拉角之间的转换
- 四元数与欧拉角之间的转换
- 四元数与欧拉角之间的转换
- 四元数与欧拉角之间的转换
- 四元数与欧拉角之间的转换
- 四元数与欧拉角之间的转换
- __declspec(dllimport)
- jQuery_统计图插件-jfreechart
- android事件分发总结
- Python 巧用set()去重
- Mac下配置java开发环境(idea,git)
- 四元数和欧拉角之间的转换
- 读张孝详《JAVA就业培训指导》二
- 黑马程序员-------------java基础----------------面向对象
- Nginx双机高可用
- android QQ第三方登录(一)
- 如何在jsp中读取配置文件的内容
- IKAnalyzer 扩展词典(强制分词)【solr里添加扩展词典,扩展词典的格式必须是 utf-8 的无BOM格式编码。jav开发中 IKAnalyzer.cfg.xml必须在类路径根下】
- linux 进程间通信 signal() 函数
- OMNET问题调试:Error in modeule (cCompoundModule) Tictoc1 (id=1): Class "Txc1" not found -- perhaps its c


