EM3002D、Seapath200、MRU-H安装测量及校准
来源:互联网 发布:编程让系统死机 编辑:程序博客网 时间:2024/06/05 10:27
更多资讯请见xiaok海洋测绘网
最近安装了kongsberg多波束EM3002D,和它配套的是Seapath200,MRU-H(MRU5)。
一、安装
换能器安装在船底,如图:

与EM2040D安装大同小异。
Seapath200需要接入两个GPS天线,计算方向且将其中一个作为定位;另接一个DGPS,输入差分信号。
Seapath200还需要接入姿态传感器MRU-H。
MRU-H安装在船舶的轴线上。
二、测量
位置和角度测量与安装同步观测,主要包括:
1)EM3002D换能器相对船舶重心的位置,相对于船舶平面的偏角。
2)GPS(定位)相对于船舶重心的位置
3)MRU-H相对于船舶重心的位置
4)waterline,必须量取MRU处左右舷水线,计算MRU处的水线,作为waterline参数
三、校准
在正式校准前,测试了设备是否正常,出现如下图:
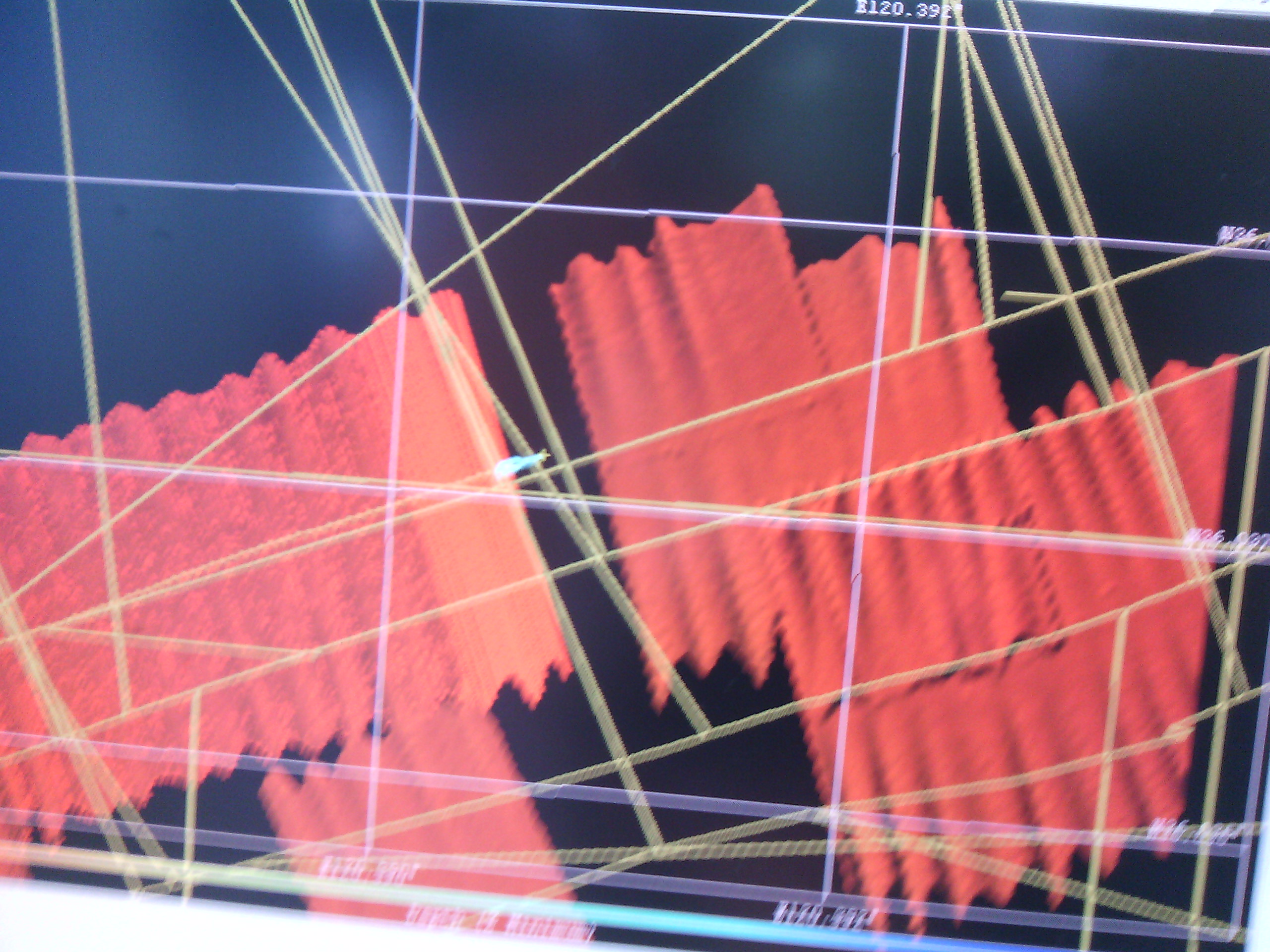
GPS跳动非常厉害,因此检查了seapth200的GPS输出,发现频率的原因,MRU的频率越高越好,但是GPS输出频率不是越高越好,
上图就是输出频率设置成100HZ的效果,改成1HZ就没有跳跃了,即使设置成2HZ,一样有跳跃。
从上图可以看出,Roll值没有校准,左深右浅,左浅右深交替出现,与波浪引起heave不同(左右舷同时深或浅)
双探头的校正:(具体参考SIS双探头校正的部分)
Roll值的校正:
找平坦海域,布设三条方向相反的测线,校正区域垂直测线方向,校正左右探头的Roll偏差,取平均值放在Attitude里(详情请查看SIS的帮助文档)
Pitch值的校正:
找一个斜坡,沿坡布设一条测线,往返测量,校正区域沿测线方向,获取左右探头的Pitch值
Heading值的校正
找一个斜坡,沿坡布设三条同方向测线,校正区域沿测线方向,获取左右探头的Heading值
上述校正,船速应该保持一致。
- EM3002D、Seapath200、MRU-H安装测量及校准
- 编辑pdf文件及校准测量的方法
- MRU
- 在测量和校准应用的焦点的XCP
- 面向初学者的XCP——测量/校准协议是什么?
- 电子罗盘实现及校准
- MTK平台校准——校准文件及软件使用
- 字体属性及测量
- 电子罗盘的工作原理及校准
- 电子罗盘的工作原理及校准
- 电子罗盘的工作原理及校准
- 电子罗盘的工作原理及校准
- minigui触摸屏校准及界面程序
- MEMS惯性传感器的性能及校准
- 11. pibot的控制及校准
- E+H电磁流量计|E+H电磁流量计测量系统
- vmware虚拟机安装linux系统鼠标校准
- ViewGroup的测量及绘制
- linux系统常用命令和解析
- android中的SurfaceView,SurfaceHolder,SurfaceHolder.CallBack
- HTML中下拉框的简单介绍<Select><option>
- 欢迎使用CSDN-markdown编辑器
- Laravel入门基础教程(一)
- EM3002D、Seapath200、MRU-H安装测量及校准
- C语言中的指针理解
- TCP协议的三次握手建立连接及四次握手断开连接
- C语言运算符的优先级和关键字
- UVA 11464 偶数矩阵
- class命名规则
- python list的append和extend操作
- poj 2376 Cleaning Shifts 【贪心+快排】
- iOS生命周期简单演示


