Orb匹配算法代码
来源:互联网 发布:算法交易软件 编辑:程序博客网 时间:2024/04/30 02:44
- #include <iostream>
- #include "opencv2/core/core.hpp"
- #include "opencv2/features2d/features2d.hpp"
- #include "opencv2/highgui/highgui.hpp"
- #include <iostream>
- #include <vector>
- using namespace cv;
- using namespace std;
- int main()
- {
- Mat img_1 = imread("D:\\image\\img1.jpg");
- Mat img_2 = imread("D:\\image\\img2.jpg");
- if (!img_1.data || !img_2.data)
- {
- cout << "error reading images " << endl;
- return -1;
- }
- ORB orb;
- vector<KeyPoint> keyPoints_1, keyPoints_2;
- Mat descriptors_1, descriptors_2;
- orb(img_1, Mat(), keyPoints_1, descriptors_1);
- orb(img_2, Mat(), keyPoints_2, descriptors_2);
- BruteForceMatcher<HammingLUT> matcher;
- vector<DMatch> matches;
- matcher.match(descriptors_1, descriptors_2, matches);
- double max_dist = 0; double min_dist = 100;
- //-- Quick calculation of max and min distances between keypoints
- for( int i = 0; i < descriptors_1.rows; i++ )
- {
- double dist = matches[i].distance;
- if( dist < min_dist ) min_dist = dist;
- if( dist > max_dist ) max_dist = dist;
- }
- printf("-- Max dist : %f \n", max_dist );
- printf("-- Min dist : %f \n", min_dist );
- //-- Draw only "good" matches (i.e. whose distance is less than 0.6*max_dist )
- //-- PS.- radiusMatch can also be used here.
- std::vector< DMatch > good_matches;
- for( int i = 0; i < descriptors_1.rows; i++ )
- {
- if( matches[i].distance < 0.6*max_dist )
- {
- good_matches.push_back( matches[i]);
- }
- }
- Mat img_matches;
- drawMatches(img_1, keyPoints_1, img_2, keyPoints_2,
- good_matches, img_matches, Scalar::all(-1), Scalar::all(-1),
- vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
- imshow( "Match", img_matches);
- cvWaitKey();
- return 0;
- }
另外: SURF SIFT
- /*
- SIFT sift;
- sift(img_1, Mat(), keyPoints_1, descriptors_1);
- sift(img_2, Mat(), keyPoints_2, descriptors_2);
- BruteForceMatcher<L2<float> > matcher;
- */
- /*
- SURF surf;
- surf(img_1, Mat(), keyPoints_1);
- surf(img_2, Mat(), keyPoints_2);
- SurfDescriptorExtractor extrator;
- extrator.compute(img_1, keyPoints_1, descriptors_1);
- extrator.compute(img_2, keyPoints_2, descriptors_2);
- BruteForceMatcher<L2<float> > matcher;
- */
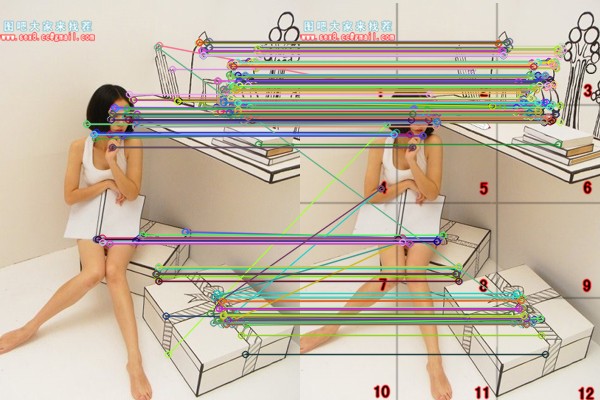
效果:
另外一个是寻找目标匹配
在右边的场景图里面寻找左边那幅图的starbucks标志
效果如下:

需要在之前的那个imshow之前加上如下代码即可完成一个简单的功能展示:
- // localize the object
- std::vector<Point2f> obj;
- std::vector<Point2f> scene;
- for (size_t i = 0; i < good_matches.size(); ++i)
- {
- // get the keypoints from the good matches
- obj.push_back(keyPoints_1[ good_matches[i].queryIdx ].pt);
- scene.push_back(keyPoints_2[ good_matches[i].trainIdx ].pt);
- }
- Mat H = findHomography( obj, scene, CV_RANSAC );
- // get the corners from the image_1
- std::vector<Point2f> obj_corners(4);
- obj_corners[0] = cvPoint(0,0);
- obj_corners[1] = cvPoint( img_1.cols, 0);
- obj_corners[2] = cvPoint( img_1.cols, img_1.rows);
- obj_corners[3] = cvPoint( 0, img_1.rows);
- std::vector<Point2f> scene_corners(4);
- perspectiveTransform( obj_corners, scene_corners, H);
- // draw lines between the corners (the mapped object in the scene - image_2)
- line( img_matches, scene_corners[0] + Point2f( img_1.cols, 0), scene_corners[1] + Point2f( img_1.cols, 0),Scalar(0,255,0));
- line( img_matches, scene_corners[1] + Point2f( img_1.cols, 0), scene_corners[2] + Point2f( img_1.cols, 0),Scalar(0,255,0));
- line( img_matches, scene_corners[2] + Point2f( img_1.cols, 0), scene_corners[3] + Point2f( img_1.cols, 0),Scalar(0,255,0));
- line( img_matches, scene_corners[3] + Point2f( img_
1 0
- Orb匹配算法代码
- ORB算法特征匹配
- 图像匹配算法之ORB
- ORB特征提取匹配opencv3代码实现
- OpenCV图像匹配算法之orb
- opencv3中ORB算法描述与匹配
- ORB 特征点检测匹配算法
- 特征点匹配——ORB算法介绍
- 基于ORB特征提取算法图像匹配 python实现
- 特征点匹配——ORB算法介绍
- 特征点匹配——ORB算法介绍
- Android Jni OpenCV-基于ORB算法特征点匹配
- ORB算法
- ORB算法
- ORB算法
- ORB算法
- ORB图像匹配
- ORB+暴力匹配
- 静
- 【C++】STL--MAP
- 【13】编码、解码与乱码
- Ubuntu安装Percona Server报libc6版本依赖错误解决方法
- 如何在eclipse中实现参数传递给args[]中
- Orb匹配算法代码
- crawler4j:轻量级多线程网络爬虫
- Stick
- c#socket异步编程和断线重连
- (转)JAVA语言为什么能跨平台?
- 怎样让FireFox显示雅黑字体
- UVa 11825 状态压缩DP
- activity互相传值报错之activity互相传值报错
- 使用python实现简单的百度百科词条爬虫


