最优化方法:梯度下降法
来源:互联网 发布:设置java编译器的版本 编辑:程序博客网 时间:2024/04/30 01:31
链接地址:http://www.codelast.com/%E5%8E%9F%E5%88%9B-%E5%86%8D%E8%B0%88-%E6%9C%80%E9%80%9F%E4%B8%8B%E9%99%8D%E6%B3%95%E6%A2%AF%E5%BA%A6%E6%B3%95steepest-descent/
一、算法过程
最速下降法(又称梯度法,或Steepest Descent),是无约束最优化领域中最简单的算法,单独就这种算法来看,属于早就“过时”了的一种算法。但是,它的理念是其他某些算法的组成部分,或者说是在其他某些算法中,也有最速下降法的“影子”。因此,我们还是有必要学习一下的。
我很久以前已经写过一篇关于最速下降法的文章了,但是这里我还打算再写一篇,提供更多一些信息,让大家可以从更简单生动的方面去理解它。
『1』名字释义
最速下降法只使用目标函数的一阶导数信息——从“梯度法”这个名字也可见一斑。并且,它的本意是取目标函数值“最快下降”的方向作为搜索方向。于是我们就想知道这个问题的答案:沿什么方向,目标函数
『2』函数值下降最快的方向
先说结论:沿负梯度方向
下面就来推导一下。
将目标函数
高阶无穷小
但是
文章来源:http://www.codelast.com/
由Cauchy-Schwartz不等式(柯西-许瓦兹不等式)可得:
当且仅当
所以
所以
『3』缺点
它真的“最快速”吗?答案是否定的。
事实是,它只在局部范围内具有“最速”性质。
对整体求解过程而言,它的下降非常缓慢。
『4』感受一下它是如何“慢”的
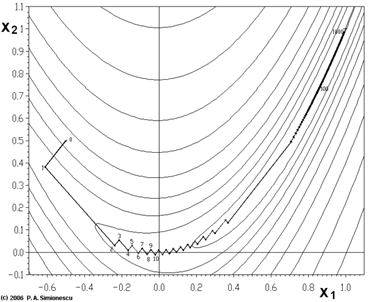
先来看一幅图(直接从维基百科上弄过来的,感谢Wiki):
文章来源:http://www.codelast.com/
这幅图表示的是对一个目标函数的寻优过程,图中锯齿状的路线就是寻优路线在二维平面上的投影。
这个函数的表达式是:
它叫做Rosenbrock function(罗森布罗克方程),是个非凸函数,在最优化领域,它通常被用来作为一个最优化算法的performance test函数。
我们来看一看它在三维空间中的图形:
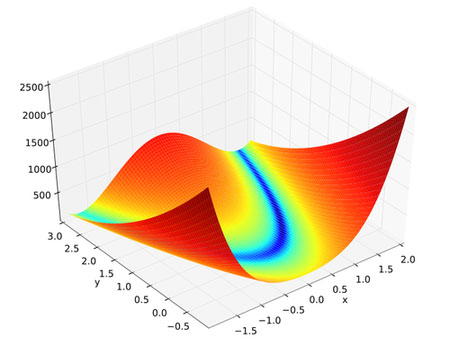
它的全局最优点位于一个长长的、狭窄的、抛物线形状的、扁平的“山谷”中。
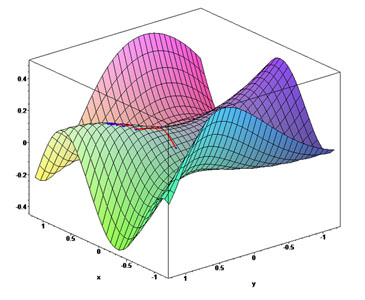
我们再来看另一个目标函数
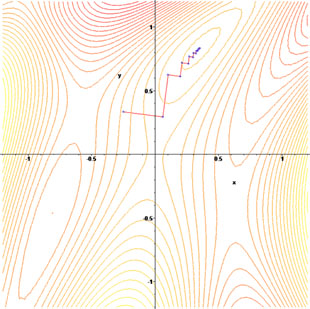
它在三维空间中的图形是这样的:
『5』为什么“慢”的分析
上面花花绿绿的图确实很好看,我们看到了那些寻优过程有多么“惨烈”——太艰辛了不是么?
但不能光看热闹,还要分析一下——为什么会这样呢?
由精确line search满足的一阶必要条件,得:
故由最速下降法的
即:相邻两次的搜索方向是相互直交的(投影到二维平面上,就是锯齿形状了)。
文章来源:http://www.codelast.com/
如果你非要问,为什么
由两向量夹角的公式:
两向量夹角为90度,因此它们直交。
『6』优点
这个被我们说得一无是处的最速下降法真的就那么糟糕吗?其实它还是有优点的:程序简单,计算量小;并且对初始点没有特别的要求;此外,许多算法的初始/再开始方向都是最速下降方向(即负梯度方向)。
文章来源:http://www.codelast.com/
『7』收敛性及收敛速度
最速下降法具有整体收敛性——对初始点没有特殊要求。
采用精确线搜索的最速下降法的收敛速度:线性。
二、梯度下降算法的代码
//梯度下降法float gsdFindArc(std::vector<cv::Point2f> & inlierPs,cv::Point2f ¢er, float radius){//弧的残差函数为 f = A - 2nXiX - 2nYiY//double matrix[4][2]={{1,4},{2,5},{5,1},{4,2}};Eigen::MatrixXf M(inlierPs.size(),2);for (int i=0;i< M.rows();++i ){M(i,0) = inlierPs[i].x;M(i,1) = inlierPs[i].y;}//初始化三个优化参数std::vector<float > xi(3);xi[0] = center.x;xi[1] = center.y;xi[2] = radius;//初始化result//double result[4]={19,26,19,20};std::vector<float > result(inlierPs.size() );float r = xi[2];for (int i=0;i< M.rows();++i ){float x = M(i,0);float y = M(i,1);result[i] = x*x + y*y - 2*x*xi[0] - 2*y*xi[1] + xi[0]*xi[0] + xi[1]*xi[1] - r*r;}//double w[2]={0,0};//初始为零向量double w[3] = {0,0,0};double loss = 10.0;const double n = 0.01; //步长 int numIter = 100*inlierPs.size();for(int i=0;i< numIter && loss>0.001; i++){double error_sum=0;int j = i % inlierPs.size();{ double h = 0;for(int k=0; k<xi.size() ; k++)h += M(j,k)* w[k];error_sum = h - result[j];for(int k=0; k<xi.size(); k++)w[k] -= n * (error_sum) * M(j,k);//更新权值,权值更新过程为整个关键过程}double loss=0;for(int j=0; j< M.rows() ;j++){double sum = 0;for( int k=0; k<xi.size() ; k++)sum += M(j,k) * w[k];loss += (sum - result[j]) * (sum-result[j]);}std::cout<< "Loss!"<< loss << std::endl;}return 1.0;}- 最优化方法:梯度下降法
- 最优化-梯度下降法
- 感知机最优化方法:梯度下降法
- 最优化 梯度下降
- 通过迭代方法理解最优化问题-梯度下降法
- 梯度下降优化方法总结
- 最优化问题——梯度下降/上升法
- 梯度下降法-最速下降法
- 最速下降法/梯度下降法
- 最优化算法:梯度下降与L_BFGS
- 最优化与随机梯度下降
- cs231n-(3)最优化:随机梯度下降
- python最优化-梯度下降实现
- 梯度下降最优化算法综述
- 优化算法-梯度下降法
- 深度学习优化方法:梯度下降法及其变形
- NN优化方法对比:梯度下降、随机梯度下降和批量梯度下降
- 梯度下降优化方法的思考
- FFmpeg中的时间戳(DTS和PTS
- codeigniter加载自定义libray时,提示找不到对象(Undefined property)的问题
- Intellij Idea环境下Spark源码阅读环境
- eclipse+spket+Extjs4.2.1开发环境搭建
- Linux 下让进程在后台可靠运行的几种方法
- 最优化方法:梯度下降法
- Windows IIS 配置Bonobo Git服务器
- html 素材表(模板、日期控件、对话框样式、 翻页 、框架)
- Android 动画特效 破碎的界面 brokview
- Linux git服务器搭建 配置IDEA git
- android多渠道打包
- 嵌入式linux:阻塞与非阻塞驱动
- FFmpeg源代码简单分析:常见结构体的初始化和销毁(AVFormatContext,AVFrame等)
- java基础知识总结(一)


