CC2540协议栈下开发流程
来源:互联网 发布:软件的健壮性 编辑:程序博客网 时间:2024/06/05 16:28
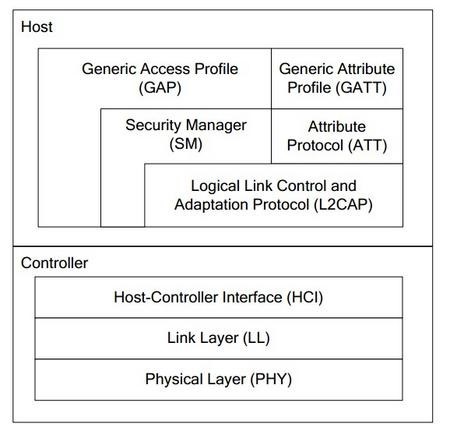
TICC2540协议栈结构如下图:
1.PHY层
1Mbps自适应跳频GFSK(高斯频移键控),运行在免证的2.4GHz。
2. LL层
LL层为RF控制器,控制设备处于准备(standby)、广播、监听/扫描(scan)、初始化、连接,这五种状态中一种。五种状态切换描述为:未连接时,设备广播信息,另外一个设备一直监听或按需扫描,两个设备连接初始化,设备连接上了。发起聊天的设备为主设备,接受聊天的设备为从设备,同一次聊天只能有一个意见领袖,即主设备和从设备不能切换。
3.HCI层
HCI层为接口层,向上为主机提供软件应用程序接口(API),对外为外部硬件控制接口,可以通过串口、SPI、USB来实现设备控制。
4.L2CAP层
L2CAP层提供数据封装服务,允许逻辑上的点对点通讯。
5.SM层
SM层提供配对和密匙分发,实现安全连接和数据交换。
6.ATT层
ATT层负责数据检索,允许设备向另外一个设备展示一块特定的数据称之为属性,在ATT环境中,展示属性的设备称之为服务器,与它配对的设备称之为客户端。链路层的主机从机和这里的服务器、客服端是两种概念,主设备既可以是服务器,也可以是客户端。从设备毅然。
7 .GATT层
GATT层定义了使用 ATT 的服务框架和配置文件(profiles)的结构。BLE 中所有的数据通信都需要经过 GATT。GATT负责处理向上与应用打交道,其关键工作是把为检索工作提供合适的profile结构,而profile由检索关键词(characteristics)组成。
8.GAP层
GAP直接与应用程序或配置文件(profiles)通信的接口,处理设备发现和连接相关服务。另外还处理安全特性的初始化。对上级,提供应用程序接口,对下级,管理各级职能部门,尤其是指示LL层控制室五种状态切换,指导保卫处做好机要工作。
最简单的程序运行时候步骤:
在SimpleBLEPeripheral_Main.c中
int main(void)
{
/* Initialize hardware */
HAL_BOARD_INIT();
// Initialize board I/O
InitBoard( OB_COLD );
/* Initialze the HAL driver */
HalDriverInit();
/* Initialize NV system */
osal_snv_init();
/* Initialize LL */
/* Initialize the operating system */
osal_init_system();
/* Enable interrupts */
HAL_ENABLE_INTERRUPTS();
// Final board initialization
InitBoard( OB_READY );
#if defined ( POWER_SAVING )
osal_pwrmgr_device( PWRMGR_BATTERY );
#endif
/* Start OSAL */
osal_start_system(); // No Return from here
return 0;
}
程序进入 osal_start_system()中会死循环等待事件发生。
在OSAL.c中会有这个函数:
void osal_run_system( void )
{
uint8 idx = 0;
#ifndef HAL_BOARD_CC2538
osalTimeUpdate();
#endif
Hal_ProcessPoll();
do {
if (tasksEvents[idx]) // Task is highest priority that is ready.
{
break;
}
} while (++idx < tasksCnt);
if (idx < tasksCnt)
{
uint16 events;
halIntState_t intState;
HAL_ENTER_CRITICAL_SECTION(intState);
events = tasksEvents[idx];
tasksEvents[idx] = 0; // Clear the Events for this task.
HAL_EXIT_CRITICAL_SECTION(intState);
activeTaskID = idx;
events = (tasksArr[idx])( idx, events );
activeTaskID = TASK_NO_TASK;
HAL_ENTER_CRITICAL_SECTION(intState);
tasksEvents[idx] |= events; // Add back unprocessed events to the current task.
HAL_EXIT_CRITICAL_SECTION(intState);
}
#if defined( POWER_SAVING )
else // Complete pass through all task events with no activity?
{
osal_pwrmgr_powerconserve(); // Put the processor/system into sleep
}
#endif
/* Yield in case cooperative scheduling is being used. */
#if defined (configUSE_PREEMPTION) && (configUSE_PREEMPTION == 0)
{
osal_task_yield();
}
#endif
}
在OSAL_Tasks.h有这个数组,我们定义了SimpleBLEPeripheral_ProcessEvent 这个事件。重点说明优先级从上到下逐渐降低。
const pTaskEventHandlerFn tasksArr[] =
{
LL_ProcessEvent, // task 0
Hal_ProcessEvent, // task 1
HCI_ProcessEvent, // task 2
#if defined ( OSAL_CBTIMER_NUM_TASKS )
OSAL_CBTIMER_PROCESS_EVENT( osal_CbTimerProcessEvent ), // task 3
#endif
L2CAP_ProcessEvent, // task 4
GAP_ProcessEvent, // task 5
GATT_ProcessEvent, // task 6
SM_ProcessEvent, // task 7
GAPRole_ProcessEvent, // task 8
GAPBondMgr_ProcessEvent, // task 9
GATTServApp_ProcessEvent, // task 10
SimpleBLEPeripheral_ProcessEvent // task 11
};
这个函数调用初始化函数为每个任务:
void osalInitTasks( void )
{
uint8 taskID = 0;
tasksEvents = (uint16 *)osal_mem_alloc( sizeof( uint16 ) * tasksCnt);
osal_memset( tasksEvents, 0, (sizeof( uint16 ) * tasksCnt));
/* LL Task */
LL_Init( taskID++ );
/* Hal Task */
Hal_Init( taskID++ );
/* HCI Task */
HCI_Init( taskID++ );
#if defined ( OSAL_CBTIMER_NUM_TASKS )
/* Callback Timer Tasks */
osal_CbTimerInit( taskID );
taskID += OSAL_CBTIMER_NUM_TASKS;
#endif
/* L2CAP Task */
L2CAP_Init( taskID++ );
/* GAP Task */
GAP_Init( taskID++ );
/* GATT Task */
GATT_Init( taskID++ );
/* SM Task */
SM_Init( taskID++ );
/* Profiles */
GAPRole_Init( taskID++ );
GAPBondMgr_Init( taskID++ );
GATTServApp_Init( taskID++ );
/* Application */
SimpleBLEPeripheral_Init( taskID );
}
- CC2540协议栈下开发流程
- CC2540蓝牙协议栈开发简介
- Cc2540 协议栈UART实验
- Cc2540 协议栈UART实验
- BLE 4.0 CC2540 协议栈架构
- BLE 4.0 CC2540 协议栈之物理层
- CC2540 BLE开发笔记
- CC2540开发入门
- 蓝牙cc2540 开发问题
- 浅析CC2540 OSAL工作流程
- CC2540、nRF51822应用开发比较
- CC2540协议栈高速串口通信解决(UART的DMA方式)
- CC2540蓝牙4.0协议栈里增加特征值详细步骤解析。
- cc2540蓝牙协议栈中按键消息的创建以及消息结构体减一的问题解析
- 关于TI CC2540 BLE协议栈中数据传输的几个函数实现(草稿)
- TI Z-stack协议栈开发环境和工作流程
- TI Z-stack协议栈开发环境和工作流程
- TI Z-stack协议栈开发环境和工作流程
- 转义字符
- UIProgressView 进度表
- IO
- APUE 8-1 fork函数实例
- 【嵌入式学习日记】2016年7月19日
- CC2540协议栈下开发流程
- linux vim 删除命令记录
- Spring整合Redis数据库(maven项目)
- 41 和为 s 的两个数字
- Java 内存分配全面浅析
- 遭受ARP攻击后现象
- A+B问题(c,c#,java实现)
- Arrays工具类十大常用方法
- SQLI-LAB 的 实战记录(Less 31 - Less 40)


