Arduino笔记
来源:互联网 发布:阿里云报价 编辑:程序博客网 时间:2024/06/01 19:42
SublimeText编译Arduino,
大概总结一下:先删除之前的版本(这个好像不用。我现在同时装了Sublime Text 2和3 同时装了插件,也没发现问题).
打开“工具--命令面板”,选择'Package Control: Add Repository' 命令。(输入Repository就出现选项了)
复制粘贴https://github.com/gepd/Stino/tree/new-stino 到弹出的输入框.
再打开“工具--命令面板”,选择'Package Control: Install Package' 命令,选择名称为'Stino'的插件. 绝对不要选'Arduino-LikeIDE.'
支持 最新的
arduino IDE
上述那种方法,我在win10 64位里并未成功,所以现在用sublime 写代码,再用标准的写入。
工具:sketch(Arduino标准软件),fritzing(线路板设计)。
常用函数
一、
查看串口数据:
void setup()
{
serial.begin(9600); //打开串口,设置波特率9600bps
}
void loop()
{
int val; //定义一个变量
val = analogRead(5); //将模拟口5的数据(很可能是传感器数据)发送到val这个变量中
Serial.println(val,DEC); //打印数据字符串,DEC是换行
delay(100)
}
Arduino学习笔记8数字输入
Arduino的控制程序里,必须有setup和loop两个函数,setup用来设置各种引脚输出等,loop用来无限循环执行。
voidsetup() {
pinMode(8,OUTPUT); //数字引脚控制 由8号出高电平
}
voidloop() {
digitalWrite(8,HIGH); //写入8号端口高电平
delay(200); //延时
digitalWrite(8,LOW); //写入8号端口低电平
delay(1000);
}
数字 I/O
• pinMode(pin, mode) 数字IO口输入输出模式定义函数,pin表示为0~13, mode表示为INPUT或OUTPUT。
• digitalWrite(pin,value) 数字IO口输出电平定义函数,pin表示为0~13,value表示为HIGH或LOW。比如定义HIGH可以驱动LED。
• int digitalRead(pin) 数字IO口读输入电平函数,pin表示为0~13,value表示为HIGH或LOW。比如可以读数字传感器。
模拟 I/O
• int analogRead(pin) 模拟IO口读函数,pin表示为0~5(Arduino Diecimila为0~5,Arduino nano为0~7)。比如可以读模拟传感器(10位AD,0~5V表示为0~1023)。
• analogWrite(pin, value) -PWM 数字IO口PWM输出函数,Arduino数字IO口标注了PWM的IO口可使用该函数,pin表示3, 5, 6, 9, 10, 11,value表示为0~255。比如可用于电机PWM调速或音乐播放。
LED这种是数字接口,比如LED灯和限流电阻是接数字8号接口和数字端GND的。
voidsetup() {
pinMode(8,OUTPUT); //数字引脚控制 由8号出高电平
}
voidloop() {
digitalWrite(8,HIGH); //写入8号端口高电平
delay(200); //延时
digitalWrite(8,LOW); //写入8号端口低电平
delay(1000);
}
传感器多是接模拟接口。
以LM35温度传感器为例,中间的接口为VOUT接模拟引脚,在这个实例里,接Arduino模拟口的A0,左侧VCC引脚需要接5V电压供电接模拟口的5V,右侧GND接上就短路(所以不接也能用)。
程序代码:
intpotPin = 0 ;//定义模拟接口 0 连接 LM35 温度传感器
voidsetup()
{
Serial.begin(9600);//设置波特率
}
voidloop()
{
int val;//定义变量,用来接收读取值
int dat;//定义变量,用来转换
val = analogRead(potPin);//从模拟接口0读取传感器的模拟值并赋值给 val
dat = (125*val)>>8 ; //温度计算公式
Serial.print("Tep : ") ; //原样输出显示 Tep 字符串代表温度
Serial.print(dat) ; //输出显示 dat 的值
Serial.println("C"); //原样输出显示 C 字符串
delay(500);//延时 0.5 秒
}
公式需要根据情况调整,总结。
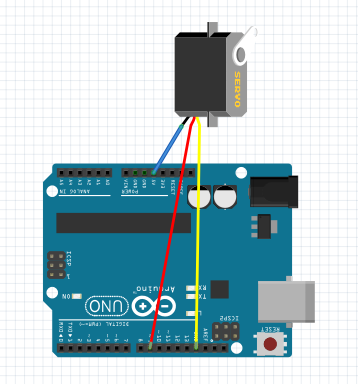
舵机 Servo:
常用于180度左右摆头的摄像头,三根引脚分别为中间的是5V模拟供电接口,0接口接GNU,PWM接口接数字端用来读取写入。
#include <Servo.h>
Servo myServo; //定义舵机对象
int pos = 0; //定义舵机转动位置
void setup() {
myServo.attach(9); //舵机定义接口为9
}
void loop() {
for(pos=0;pos<180;pos+=1){
myServo.write(pos);
delay(15);
}
for(pos=180;pos>1;pos-=1){
myServo.write(pos);
delay(15);
}
}
--------------------------------------------------
熟悉模块之后,就是需要根据实际情况组合,急需学习蓝牙通讯/wifi通信。
- Arduino笔记
- Arduino 笔记
- Arduino笔记
- Arduino笔记(一)
- Arduino 教程 笔记
- Arduino学习笔记1
- arduino学习笔记 一
- Arduino 应用笔记
- Arduino入门函数笔记
- Arduino学习笔记
- arduino开发入门笔记
- arduino学习笔记1 - 什么是arduino?
- Arduino学习笔记2--安装Arduino系统
- Arduino学习笔记—Arduino编程基础
- Arduino笔记五三轴陀螺仪L3G4200D
- arduino 学习笔记(一)
- Arduino 学习笔记(二)
- Arduino学习笔记~(1)
- 差分
- 程序员的你是否熟练掌握Chrome开发者工具?
- React’s diff algorithm
- C语言OJ项目参考(2698) 大奖赛计分
- 城市地图-图的深度优先遍历
- Arduino笔记
- 操作系统
- Leetcode-129. Sum Root to Leaf Numbers
- LeetCode 137. Single Number II 解题报告
- C++拷贝构造函数详解
- JavaScript用户输入自己的名字,输出写给用户的信件
- Python处理文件夹TXT
- xUtils网络请求小Demo
- 115. Distinct Subsequences


