Astar A*算法 最短路径算法
来源:互联网 发布:刷帮豆软件 编辑:程序博客网 时间:2024/05/16 09:08
http://www.cnblogs.com/msxh/p/5674417.html
通常情况下,迷宫寻路算法可以使用深度优先或者广度优先算法,但是由于效率的原因,不会直接使用这些算法,在路径搜索算法中最常见的就是A*寻路算法。使用A*算法的魅力之处在于它不仅能找到地图中从A到B的一条路径,还能保证找到的是一条最短路径,它是一种常见的启发式搜索算法,类似于Dijkstra算法一样的最短路径查找算法,很多游戏应用中的路径搜索基本都是采用这种算法或者是A*算法的变种。
下面我们来了解一下A*算法相关的理论知识:

如图,我们需要在迷宫中找到A点到B点的一条最短的可以通过的路径,A和B直接被一面墙堵住了。在上一篇博客中我们说到了,地图是有二维数组组成的,墙表示不能通过的地方,用1表示,A*算法所要做的就是从A找到一条最短的通向B的路径。当然,不能从墙上飞过去,也不能瞬移到B。只能每次移动一个格子,一步一步地移动到B目标位置。问题在于,每次移动一格的时候,有上下左右四个方向,这里我们限制物体斜向移动,如何选择下一个移动方向呢?按照我们的想法,不就是找一条离目标最近的路吗?那我们可以在这四个方向中,找一个最接近目标点的位置,当然,还要考虑障碍因素,基于这个思想,A*算法采用了以下的搜索步骤来实现:
1.首先把起始位置点加入到一个称为“open List”的列表,在寻路的过程中,目前,我们可以认为open List这个列表会存放许多待测试的点,这些点是通往目标点的关键,以后会逐渐往里面添加更多的测试点,同时,为了效率考虑,通常这个列表是个已经排序的列表。
2.如果open List列表不为空,则重复以下工作:
(1)找出open List中通往目标点代价最小的点作为当前点;
(2)把当前点放入一个称为close List的列表;
(3)对当前点周围的4个点每个进行处理(这里是限制了斜向的移动),如果该点是可以通过并且该点不在close List列表中,则处理如下;
(4)如果该点正好是目标点,则把当前点作为该点的父节点,并退出循环,设置已经找到路径标记;
(5)如果该点也不在open List中,则计算该节点到目标节点的代价,把当前点作为该点的父节点,并把该节点添加到open List中;
(6)如果该点已经在open List中了,则比较该点和当前点通往目标点的代价,如果当前点的代价更小,则把当前点作为该点的父节点,同时,重新计算该点通往目标点的代价,并把open List重新排序;
3.完成以上循环后,如果已经找到路径,则从目标点开始,依次查找每个节点的父节点,直到找到开始点,这样就形成了一条路径。
以上,就是A*算法的全部步骤,按照这个步骤,就可以得到一条正确的路径。这里有一个关键的地方,就是如何计算每个点通往目标点的代价,之所以称为A*算法为启发式搜索,就是因为通过评估这个代价值来搜索最近的路径,对于任意一个点的代价值,在A*算法中通常使用下列的公式计算:
代价F=G+H
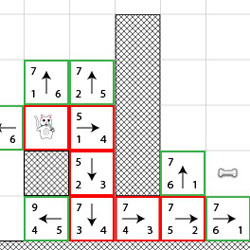
在这里,F表示通往目标点的代价,G表示从起始点移动到该点的距离,H则表示从该点到目标点的距离,比如图中,可以看到小狗的附近格子的代价值,其中左上角的数字代表F值,左下角的数字代表G值,右下角的数字代表H值。拿小狗上方的格子来举例,G=1,表示从小狗的位置到该点的距离为1个格子,H=6,表示从小狗到骨头的距离是6个格子,则F=G+H=7。在此处,距离的算法是采用曼哈顿距离,它计算从当前格子到目的格子之间水平和垂直的方格的数量总和,例如在平面上,坐标(x1,y1)的点和坐标(x2,y2)的点的曼哈顿距离为:
|x1-x2|+|y1-y2|
当然,距离的算法也可以采用其他的方法,实际在游戏中,这个移动的代价除了要考虑距离因素外,还要考虑当前格子的游戏属性。比如有的格子表示水路、草地、陆地,这些有可能影响人物移动的速度,实际计算的时候还要把这些考虑在内。
另一个需要注意的就是,在计算这个距离的时候是毋须考虑障碍因素的,因为在以上A*算法步骤中会剔除掉障碍。
这样,按照前面所说的A*算法的步骤,第一次循环open List的时候,把A点作为当前点,同时把A周围的四个点放入到open List中。第二次循环的时候把A右边的点作为当前点,该点的父节点就是A,这是处理当前点的时候,只需要把当前点的上下两个点放入open List中,因为左边的A已经在close List中,而右边的是墙,所以直接被忽略。
算法比较简单就不贴把,用优先队列比较好实现
- Astar A*算法 最短路径算法
- 数据结构-Astar算法-最短路径
- 最短路径算法之AStar算法(二) A Star算法需要注意的问题
- 自己写的一个AStar(A*)最短路径搜索算法
- VB6源代码--A*最短路径算法(AStar Shortest Path Finder)
- 最短路径算法之AStar算法(一) AStar算法的证明
- AStar算法求解迷宫最短路径问题
- A*最短路径算法
- 最短路径算法之AStar算法(三) 《A* Pathfinding for Beginners》一文中的两个问题
- 最短路径算法之AStar算法(四) 可变H函数
- A* 算法求解最短路径
- A* 算法求解最短路径
- A*算法的最短路径实现!
- A* 算法搜索最短路径
- A*算法求解最短路径
- A* 算法搜索最短路径
- 最短路径算法Dijkstra和A*
- A星算法,找寻最短路径
- HDU 1503Advanced Fruits 递推
- 分类(1):决策树与模型评估
- uC/OS-III Note
- 18. 4Sum (python)
- php中魔术变量解析
- Astar A*算法 最短路径算法
- word-wrap、white-space和word break的区别
- iOS开发小技巧汇总
- Mybatis简易介绍
- 整合dtk + hpssacli2.4
- python学习[2]_Python中面向对象编程1
- Struts2使用客户端校验
- 31. Next Permutation (python)
- 利用先序遍历创建二叉树的后序遍历序列(0979)


