Retinex图像增强和暗通道去雾的关系及其在hdr色调恢复上的应用
来源:互联网 发布:丸子网络 编辑:程序博客网 时间:2024/06/16 18:31
很多人都认为retinex和暗通道去雾是八杆子都打不着的增强算法。的确,二者的理论、计算方法都完全迥异,本人直接从二者的公式入手来简单说明一下,有些部分全凭臆想,不对之处大家一起讨论。
首先,为描述方便,后面所有的图像都是归一化到[0,1]的浮点数图像。
Retinex的公式就是:
J=I/L (1)
其中,J是所求的图像,I是观测图像,L是估计的光照图像。注意,由于有J、I、L的值都在区间[0,1]内,则有L>=I成立。(这里使用符号J和I,而不是常规的R和S,主要是为了和暗通道公式保持一致,便于比较)
暗通道去雾的公式为:
J=(I-A)/t+A (2)
其中,A是光照值,t是透射率。如果我们定义遮罩图像V1, 并令t=1-V1/A, 将其带入上面公式,则有:
J = (I-V1)/(1-V1/A) (3)
一般有I>=V1, 由于光照A的值一般都偏大,接近于1,那么上面公式再次简化为:
J = (I-V1)/(1-V1) (4)
仔细观察公式(1)和(4),你发现相似之处了吗?
在公式(1)中,I值介于0和L之间,其作用就是将I线性拉伸到[0,1]之间,公式(4)中,I值介于[V1,1]之间,其作用也是将其值线性拉伸到[0,1]之间。
所以,二者是类似的。
如果现在图像I值介于[V1,L]之间,那么自然地恢复公式是:
J = (I-V1)/(L-V1) (5)
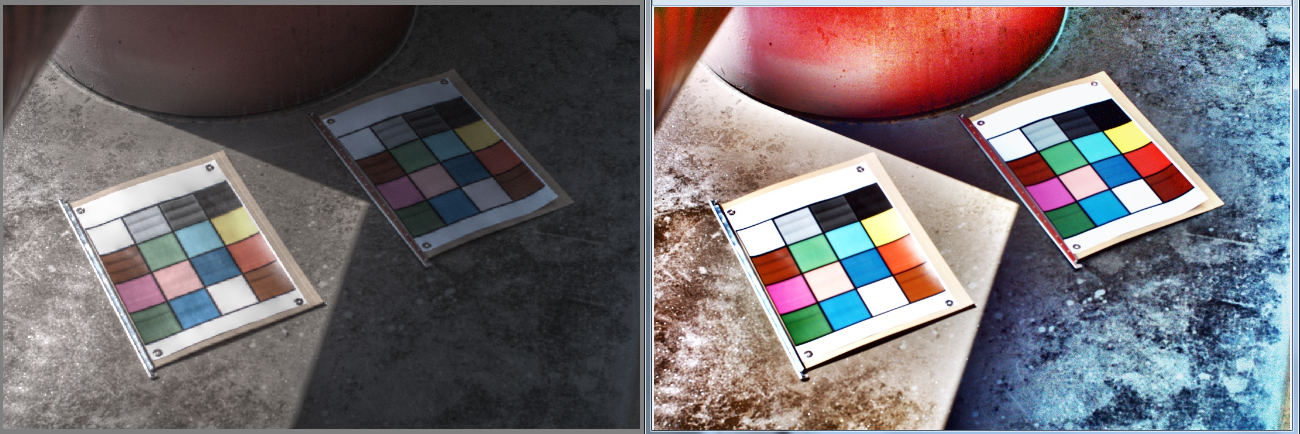
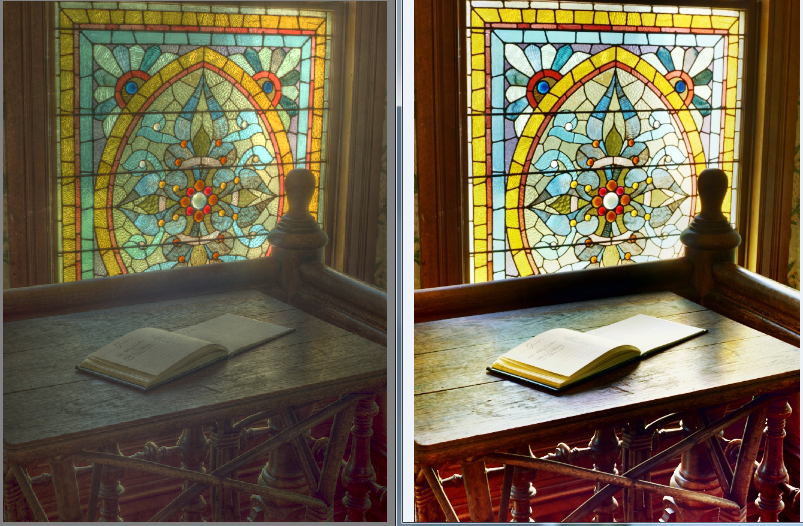
如果直接套用上面公式到普通图像,效果很容易增强太过,毕竟难以找到又有较强雾霾有光照不足的场景。什么图像合适呢?标题已经点明了,HDR图像。V1也就是我前几天说的暗边界,L就是亮边界,三个RGB通道可以共用暗边界,但L要各自计算。此外,hdr的预处理也非常关键,比如进行对数操作,最后要采用非线性归一化操作。
话不多说,下面上图。左边是Luminance-HDR软件的结果,右边是我的增强结果。
软件EXE下载地址:http://pan.baidu.com/s/1cxKU0u
程序采用python实现,未经性能优化,exe中打包了python及numpy wxpython opencv等重量级模块,故体积较大,如杀毒软件误报为病毒,请信任运行。
下面是python全部代码(没有读取hdr文件部分,参见下一篇博客),只有98行哦
import cv2,wximport numpy as npfrom readHdr import readHdr #readHdr程序代码参见下一遍博客def zmMinFilterGray(src, r=7): #计算最小值滤波,r是滤波器半径 if r <= 0: return src h, w = src.shape[:2] I = src res = np.minimum(I , I[[0]+range(h-1) , :]) res = np.minimum(res, I[range(1,h)+[h-1], :]) I = res res = np.minimum(I , I[:, [0]+range(w-1)]) res = np.minimum(res, I[:, range(1,w)+[w-1]]) return zmMinFilterGray(res, r-1)def guidedfilter(I, p, r, eps): #引导滤波 height, width = I.shape m_I = cv2.boxFilter(I, -1, (r,r)) m_p = cv2.boxFilter(p, -1, (r,r)) m_Ip = cv2.boxFilter(I*p, -1, (r,r)) cov_Ip = m_Ip-m_I*m_p m_II = cv2.boxFilter(I*I, -1, (r,r)) var_I = m_II-m_I*m_I a = cov_Ip/(var_I+eps) b = m_p-a*m_I m_a = cv2.boxFilter(a, -1, (r,r)) m_b = cv2.boxFilter(b, -1, (r,r)) return m_a*I+m_bdef stretchImage2(data, vv = 10.0): #非线性拉伸 m = data-data.mean() S = np.sign(m) A = np.abs(m) A = 1.0 - vv**(-A) m = S*A vmin, vmax = m.min(), m.max() return (m-vmin)/(vmax-vmin)def getV1(m, r, eps, ratio): #对所有通道求同样暗边界 tmp = np.min(m,2) V1 = cv2.blur(zmMinFilterGray(tmp, 7), (7,7)) V1 = guidedfilter(tmp, V1, r, eps) V1 = np.minimum(V1, tmp) V1 = np.minimum(V1*ratio, 1.0) return V1def getV2(m, r, eps, ratio): Y = np.zeros(m.shape) for k in range(3): #对每个通道单独求亮边界 v2 = 1 - cv2.blur(zmMinFilterGray(1-m[:,:,k],7), (7,7)) v2 = guidedfilter(m[:,:,k], v2, r, eps) v2 = np.maximum(v2, m[:,:,k]) Y[:,:,k] = np.maximum(1-(1-v2)*ratio, 0.0) return Ydef ProcessHdr(m, r, eps, ratio, para1): #单尺度处理 V1 = getV1(m, r, eps, ratio) #计算暗边界 V2 = getV2(m, r, eps, ratio) #计算亮边界 Y = np.zeros(m.shape) for k in range(3): Y[:,:,k] = ((m[:,:,k]-V1)/(V2[:,:,k]-V1)) Y = stretchImage2(Y,para1) #非线性拉伸 return Ydef ProcessHdrMs(m, r=[161], eps=[0.005,0.001, 0.01], ratio=[0.98, 0.98, 0.92], para1=10.0): #多尺度处理 Y = [] for k in range(len(r)): Y.append(ProcessHdr(m, r[k], eps[k], ratio[k], para1)) return sum(Y)/len(r)if __name__ == '__main__': import glob,os.path for d in ['auto.hdr',]: m = readHdr(d) #读取dhr文件, readHdr程序代码参见下一遍博客 m1,m2 = m.max(), m.min() m = (m-m2)/(m1-m2) *255 #数据拉伸到[0,255] m1 = m[:,:,0].copy(); m[:,:,0] = m[:,:,2]; m[:,:,2]=m1 #颜色通道调整,opencv里R和B反了 m = np.log(m+1)/np.log(256) #log处理 for i in range(2): #如果图像还是很暗,则需要多次log处理 tmp = np.max(m,2) tmp = guidedfilter(tmp, tmp, 301, 0.01) th = np.mean(tmp<0.05) if th < 0.3: break m1 = np.log(m*255+1)/np.log(256) tmp = np.clip(tmp, 0.0, 1.0) ** (0.05) #tmp是权重参数 for k in range(3): #取加权平均 m[:,:,k] = tmp*m[:,:,k] + (1-tmp)*m1[:,:,k] m2 = ProcessHdrMs(m)*255 cv2.imwrite('%s.jpg' % d.split('.')[0], m2)







- Retinex图像增强和暗通道去雾的关系及其在hdr色调恢复上的应用
- 暗通道优先的图像去雾算法(上)
- 暗通道优先的图像去雾算法(上)
- 暗通道优先的图像去雾算法(上)
- 基于暗通道的图像去雾
- 基于Retinex理论的图像增强
- retinex图像增强算法的研究
- 基于Retinex的图像去雾算法(MATLAB实现)
- 单幅图像基于暗通道的图像去雾
- 单幅图像基于暗通道的图像去雾
- 单幅图像基于暗通道的图像去雾
- 暗通道优先的图像去雾算法(下)
- 暗通道优先的图像去雾算法(下)
- 暗通道优先的图像去雾算法
- 暗通道优先的图像去雾算法(下)
- 《暗通道优先的图像去雾算法》读书笔记
- 关于Retinex图像增强算法的一些新学习
- 基于直方图的图像增强算法(HE、CLAHE、Retinex)
- c语言==野指针形成原理、造成的危害及避免方法(22)
- 如何在tomcat下部署多个项目
- 动态加载javascript,引用外链
- 04-树5 Root of AVL Tree
- android从一个应用跳转到另一个应用
- Retinex图像增强和暗通道去雾的关系及其在hdr色调恢复上的应用
- maven---10使用Jenkins进行持续集成
- 使用python自动备份数据库并上传到七牛服务器(定期清除)
- 解析hdr图像文件的python实现
- 设置Eclipse的workspace路径
- SAP价值串
- banana pi m1 编译jpeglib
- awk 常用命令详解
- JAVA循环冗余校验(CRC32)


