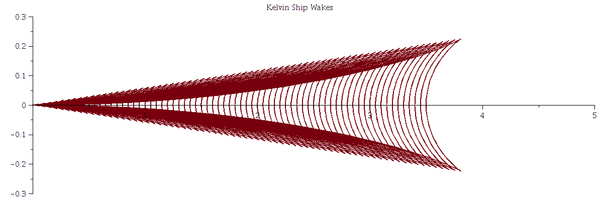
开尔文船波(Kelvin Wake, Kelvin ship wave)。鸭子或船只在深水湖面经过时,在后面会激起一道V形的波。开尔文男爵最先对船波进行数学研究,因此称为开尔文船波。船波动形状和福禄数{\displaystyle Fr} 有密切关系。
有密切关系。
{\displaystyle Fr={\frac {V}{\sqrt {gl}}}}
其中g为重力常数,V是船速,l是船的长度。
令船的长度{\displaystyle l=k*{\frac {V^{2}}{g}}} 则{\displaystyle Fr={\frac {1}{\sqrt {k}}}}
则{\displaystyle Fr={\frac {1}{\sqrt {k}}}} .
.
对于长度大而速度低的轮船,Fr数小,开尔文船波主要是长波,其波前与速度矢量的夹角比较小。
而小快艇,长度小,速度高,Fr 数大,开尔文船波则以短波长的水波为主,而波前则与速度数量成较大的夹角。[1]
开尔文船波动研究,对于船舶的设计有重要意义,因为船舶的马力,有一部分消耗在激起船波。利用Fr数与速度成正比,与长度的平方根成反比的规律,可以利用小的模型,缩小船长{\displaystyle M^{2}} 倍,同时缩小速度M倍,可以在实验室中模拟海上巨舟。[2]
倍,同时缩小速度M倍,可以在实验室中模拟海上巨舟。[2]
目录
[隐藏] - 1多鞍点函数积分
- 2开尔文驻相法
- 3外部链接
- 4脚注
- 5参考文献
多鞍点函数积分[编辑]

Integrand of Kelvin Wake Integral

Kelvin Ship Wake Integrand contour Maple plot
当船只以速度V驶过深水湖面,波形的幅度在相对于船只为静止的极坐标({\displaystyle \rho ,\phi } 中在船只的速度矢量方向,{\displaystyle \phi =0}
中在船只的速度矢量方向,{\displaystyle \phi =0} ),由下列公式表示[3]
),由下列公式表示[3]
{\displaystyle K(\phi ,\rho )=\int _{-\pi /2}^{\pi /2}cos(\rho {\frac {cos(\theta +\phi )}{cos^{2}\theta }}d\theta }
其中{\displaystyle \rho =gr/V^{2}}
{\displaystyle {\frac {1}{\rho }}={\frac {V^{2}}{gr}}} 是福禄数的平方{\displaystyle Fr^{2}}
是福禄数的平方{\displaystyle Fr^{2}}
{\displaystyle g} 为重力常数{\displaystyle l}
为重力常数{\displaystyle l} 为船的长度。
为船的长度。
上列K函数是下列多鞍点积分的正数部分:
{\displaystyle K(\phi ,\rho )=Re(\int _{-\infty }^{\infty }\exp(i*\rho *f(\theta ,\rho )d\theta )} 其中,多鞍点积分的核函数为
其中,多鞍点积分的核函数为
{\displaystyle f(\theta ,\phi )=-{\frac {cos(\theta +\phi )}{cos^{2}\theta }}}
此核函数是一个多鞍点函数,振荡剧烈如图
求其极点,
{\displaystyle {\frac {df(\theta ,\phi )}{d\theta }}={\frac {sin(\theta +\phi )}{cos(\theta )^{2}}}-{\frac {2*cos(\theta +\phi )*sin(\theta )}{cos(\theta )^{3}}}=0}
解之,得
{\displaystyle \theta _{1}=arctan({\frac {(1/4)*(1+{\sqrt {(1-8*tan(\phi )^{2}))}}}{tan(\phi )}})=-arctan({\frac {(1/4)*(-1+{\sqrt {(}}1-8*tan(\phi )^{2}))}{tan(\phi )}})}
由此
{\displaystyle \phi _{1}=19.47} 度,
度,
{\displaystyle \phi _{2}=-19.47} 度
度
这就是凯尔文船波的V型波包线的夹角,最早由凯尔文男爵发现,而且角度与船速无关.[4][5]至于波纹本身则与船速矢量的夹角为
{\displaystyle \theta =\pi -19.47=35.3} °[1]
°[1]
开尔文驻相法[编辑]

Kelvin Wake (Maple density plot)
开尔文船波积分{\displaystyle K(\phi ,\rho )} 必须通过数值积分计算。开尔文男爵根据被积分函数在积分区间内剧烈震荡的特点,提出了驻相法(Method of Stationary Phase)。
必须通过数值积分计算。开尔文男爵根据被积分函数在积分区间内剧烈震荡的特点,提出了驻相法(Method of Stationary Phase)。
原理:当被积分函数剧烈震荡时,除了在极点外,震荡的被积分函数正负相抵消,因此可以将此被积分函数在极点的值作为整个积分的近似,驻相法乃是拉普拉斯方法的推广。[6]
被积分函数 {\displaystyle f(\theta ,\phi )=-{\frac {cos(\theta +\phi )}{cos^{2}\theta }}} 的两个极点是:
{\displaystyle \theta _{p}=arctan({\frac {(1/4)*(1+{\sqrt {(1-8*tan(\phi )^{2}))}}}{tan(\phi )}})}
{\displaystyle \theta _{m}=-arctan({\frac {(1/4)*(-1+{\sqrt {(}}1-8*tan(\phi )^{2}))}{tan(\phi )}})}
令
{\displaystyle f_{m}=f(\theta _{m},\phi )={\frac {sin((1/2)*\phi -(1/2)*arcsin(3*sin(\phi )))}{sin((1/2)*\phi +(1/2)*arcsin(3*sin(\phi )))}}}
{\displaystyle f_{p}=f(\theta _{p},\phi )={\frac {cos((1/2)*\phi +(1/2)*arcsin(3*sin(\phi )))}{cos(-(1/2)*\phi +(1/2)*arcsin(3*sin(\phi )))}}}
{\displaystyle fbar:=1/2*(f_{p}+f_{m})}
{\displaystyle D2F={\frac {d^{2}F(\theta ,\phi )}{d\theta ^{2}}}}
{\displaystyle D2F_{p}=D2F(\theta _{p},\phi )}
{\displaystyle D2F_{m}=D2F(\theta _{m},\phi )}
{\displaystyle \Delta :=(3/4*(f_{m}-f_{p}))^{(}2/3)}
{\displaystyle u={\sqrt {\frac {\Delta ^{1/2}}{2}}}*({\frac {1}{\sqrt {D2F_{p}}}}+{\frac {1}{\sqrt {-D2F_{m}}}})}
{\displaystyle v={\sqrt {\frac {2}{\Delta ^{1/2}}}}*({\frac {1}{\sqrt {D2F_{p}}}}-{\frac {1}{\sqrt {-D2F_{m}}}})}
{\displaystyle K(\phi ,\rho )\approx 2*\pi *(u*cos(\rho *fbar)*AiryAi(-\rho ^{(}2/3)*\Delta )/\rho ^{(}1/3)+v*sin(\rho *fbar)*AiryAi(1,-\rho ^{(}2/3)*\Delta )/\rho ^{(}2/3))}
开尔文船波的波峰,由下列两个参数方程式描述[7]
{\displaystyle x:=X*sin(\beta )*(1-(1/2)*sin(\beta )^{2})}
{\displaystyle y:=X*sin(\beta )^{2}*cos(\beta )/(2*M)}
外部链接[编辑]
- §36.13 Kelvin’s Ship-Wave Pattern
脚注[编辑]
- ^ 1.0 1.1 James LightHill, p274
- ^ James Lighthill p275
- ^ Frank Oliver, p790-791
- ^ Shu, Jian-Jun. Transient Marangoni waves due to impulsive motion of a submerged body. International Applied Mechanics. 2004, 40 (6): 709–714. doi:10.1023/B:INAM.0000041400.70961.1b.
- ^ Shu, Jian-Jun. Transient free-surface waves due to impulsive motion of a submerged source. Underwater Technology. 2006, 26 (4): 133–137. doi:10.3723/175605406782725023.
- ^ Frank Oliver, p790-795
- ^ James LightHill,p277
参考文献[编辑]
- Frank J. Oliver, NIST Handbook of Mathematical Functions, 2010, Cambridge University Press
- Jame Lighthill Waves in Fluids, Cambridge University Press 1979