Ship Kelvin Wake
来源:互联网 发布:女娲 知乎 编辑:程序博客网 时间:2024/06/14 20:14
Contents
[hide]- 1 Introduction
- 1.1 Translating Coordinate System
- 1.2 Kelvin wake
- 1.3 Application of the Group velocity
- 1.4 Solution of the equation for angle
Introduction

A ship moving over the surface of undisturbed water sets up waves emanating from the bow and stern of the ship. The waves created by the ship consist of divergent and transverse waves. The divergent wave are observed as the wake of a ship with a series of diagonal or oblique crests moving outwardly from the point of disturbance. These wave were first studied by Lord Kelvin
Translating Coordinate System
We have a the standard fixed coordinate system
Let
where the relation between the coordinates of the two coordinate systems has been introduced. Note the time dependence occurs in two places in
All time derivatives of the earth fixed velocity potential
If the flow is steady relative to the ship fixed coordinate system
but
or, the ship wake is stationary relative to the ship but not relative to an observed on the beach.
Kelvin wake
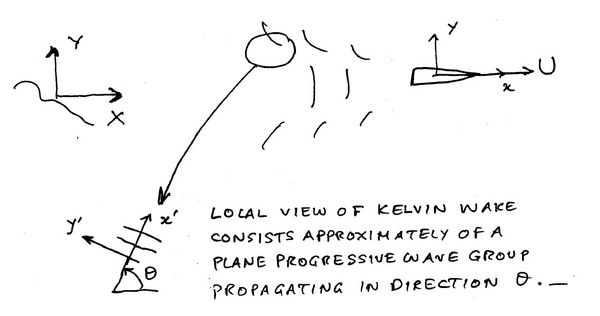
Local view of Kelvin wake consists approximately of a plane progressive wave group propagating in direction
Relative to the ship frame
But relative to the ship frame waves are stationary, so we must have:
or
This implies the following
- The phase velocity of the waves in the kelvin wake propagating in direction must be equal to
θ , otherwise they cannot be stationary relative to the ship.Ucosθ - Relative to the earth system the frequency of a local system propagating in direction is given by the relation
θ ω=kUcosθ
Relative to the earth system the Infinite Depth Dispersion Relation for a Free Surface states
so that
This is the wavelength of waves in a Kelvin wake propagating in direction
Application of the Group velocity
An observer sitting on an earth fixed frame observes a local wave system propagating in direction
Or
So:
However
By virtue of the dispersion relation derived above:
It follows from the chain rule of differentiation that Rayleigh's condition is:
At the position of the Kelvin waves which are locally observed by an observer at the beach.
- So the "visible" waves in the wake of a ship are wave groups which must travel at the local group velocity. These conditions translate into the above equation which will be solved and discussed next. More discussion and a more mathematical derivation based on the principle of stationary phase can be found in Newman 1977.
Solution of the equation for angle
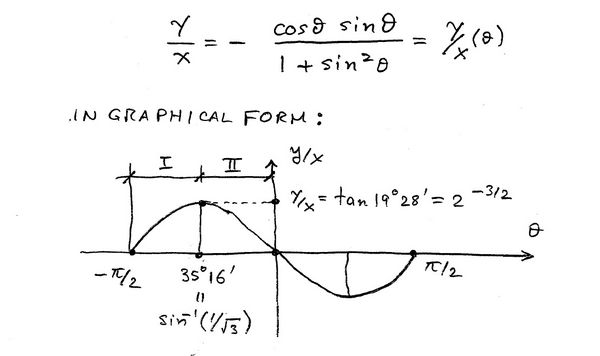
The solution of the above equation will produce a relation between
Simple algebra leads to:
which implies that
- is anti-symmetric about
yx(θ) and each part corresponds to the Kelvin wake in the port and starboard sides of the vessel. The physics onθ=0
either side is identical due to symmetry.
- : waves propagating in the same direction as the ship. These waves can only exist at
θ=0 as seen above.Y=0
- : waves propagating at a
θ=π2 angle relative to the ship direction of forward translation.90∘
- : (or 35,26°) waves propagating at an angle
θ=35∘16′ relative to the ship axis. These are waves seen at the caustic of the Kelvin wake.θ=35∘16′
Let the solution of
Note that observable waves cannot exist for values of
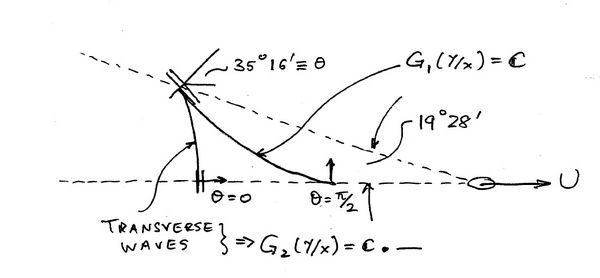
The crests of the wave system trailing a ship, the Kelvin wake, are curves of constant phase of:
In
In
Plotting these curves we obtain a visual graph of the "transverse" and "divergent" wave systems in the Kelvin wake.
This article is based on the MIT open course notes and the original article can be found here
Ocean Wave Interaction with Ships and Offshore Energy Systems
- Ocean Wave Interaction with Ships and Offshore Structures
- Incomplete Pages
- Linear Water-Wave Theory
Contents
[hide]- 1 Introduction
- 1.1 Translating Coordinate System
- 1.2 Kelvin wake
- 1.3 Application of the Group velocity
- 1.4 Solution of the equation for angle
Introduction
A ship moving over the surface of undisturbed water sets up waves emanating from the bow and stern of the ship. The waves created by the ship consist of divergent and transverse waves. The divergent wave are observed as the wake of a ship with a series of diagonal or oblique crests moving outwardly from the point of disturbance. These wave were first studied by Lord Kelvin
Translating Coordinate System
We have a the standard fixed coordinate system
Let
where the relation between the coordinates of the two coordinate systems has been introduced. Note the time dependence occurs in two places in
All time derivatives of the earth fixed velocity potential
If the flow is steady relative to the ship fixed coordinate system
but
or, the ship wake is stationary relative to the ship but not relative to an observed on the beach.
Kelvin wake
Local view of Kelvin wake consists approximately of a plane progressive wave group propagating in direction
Relative to the ship frame
But relative to the ship frame waves are stationary, so we must have:
or
This implies the following
- The phase velocity of the waves in the kelvin wake propagating in direction must be equal to
θ , otherwise they cannot be stationary relative to the ship.Ucosθ - Relative to the earth system the frequency of a local system propagating in direction is given by the relation
θ ω=kUcosθ
Relative to the earth system the Infinite Depth Dispersion Relation for a Free Surface states
so that
This is the wavelength of waves in a Kelvin wake propagating in direction
Application of the Group velocity
An observer sitting on an earth fixed frame observes a local wave system propagating in direction
Or
So:
However
By virtue of the dispersion relation derived above:
It follows from the chain rule of differentiation that Rayleigh's condition is:
At the position of the Kelvin waves which are locally observed by an observer at the beach.
- So the "visible" waves in the wake of a ship are wave groups which must travel at the local group velocity. These conditions translate into the above equation which will be solved and discussed next. More discussion and a more mathematical derivation based on the principle of stationary phase can be found in Newman 1977.
Solution of the equation for angle
The solution of the above equation will produce a relation between
Simple algebra leads to:
which implies that
- is anti-symmetric about
yx(θ) and each part corresponds to the Kelvin wake in the port and starboard sides of the vessel. The physics onθ=0
either side is identical due to symmetry.
- : waves propagating in the same direction as the ship. These waves can only exist at
θ=0 as seen above.Y=0
- : waves propagating at a
θ=π2 angle relative to the ship direction of forward translation.90∘
- : (or 35,26°) waves propagating at an angle
θ=35∘16′ relative to the ship axis. These are waves seen at the caustic of the Kelvin wake.θ=35∘16′
Let the solution of
Note that observable waves cannot exist for values of
The crests of the wave system trailing a ship, the Kelvin wake, are curves of constant phase of:
In
In
Plotting these curves we obtain a visual graph of the "transverse" and "divergent" wave systems in the Kelvin wake.
This article is based on the MIT open course notes and the original article can be found here
Ocean Wave Interaction with Ships and Offshore Energy Systems
- Ocean Wave Interaction with Ships and Offshore Structures
- Incomplete Pages
- Linear Water-Wave Theory
- Ship Kelvin Wake
- Kelvin’s Ship-Wave Pattern
- Ship wakes: Kelvin or Mach angle?
- Wake
- Kelvin wakes
- model-ship ship-crafts
- 给kelvin的信
- 给kelvin的信
- ship shell
- hdu5093battle ship
- Wake Up!!!
- wake lock/ wake unlock 应用
- 与Kelvin的MSN记录
- 与Kelvin的MSN记录
- Windows 7 ship party
- it's you ship
- Ship application with SqliteDb
- Drop Ship Cycle
- 误删文件的恢复-extundelete
- Ship wakes: Kelvin or Mach angle?
- 最大公约数与最小公倍数
- Zurmo(九)----货币机制
- Android广播之发送广播的源码分析
- Ship Kelvin Wake
- 2016-12-18日股市复盘
- 《React-Native系列》37、 ReactNative百度地图开源组件使用
- 整理工具下载地址
- Kelvin’s Ship-Wave Pattern
- java的输入字节流 FileInputStream类
- 远程桌面无法复制粘贴的解决方法汇总
- PAT基础编程 5-7 12-24小时制 (15分)
- C/C++中动态链接库的创建和调用


