READING NOTE: Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields
来源:互联网 发布:h3c vlan删除端口 编辑:程序博客网 时间:2024/05/18 21:42
TITLE: Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields
AUTHOR: Zhe Cao, Tomas Simon, Shih-En Wei, Yaser Sheikh
ASSOCIATION: CMU
FROM: arXiv:1611.08050
CONTRIBUTIONS
- a method for multi-person pose estimation is proposed that approaches the problem in a bottom-up manner to maintain realtime performance and robustness to early commitment, but utilizes global contextual information in the detection of parts and their association.
- Part Affinity Fields (PAFs), a set of 2D vector fields, is presented, each of which encode the location and orientation of a particular limb at each position in the image domain.
METHOD
This work is the successor of Convolutional Pose Machines. The network structure, which predict the part emergence heatmap and part aafinity field jointly, is illustrated in the following figure. We can compare it with previous work.
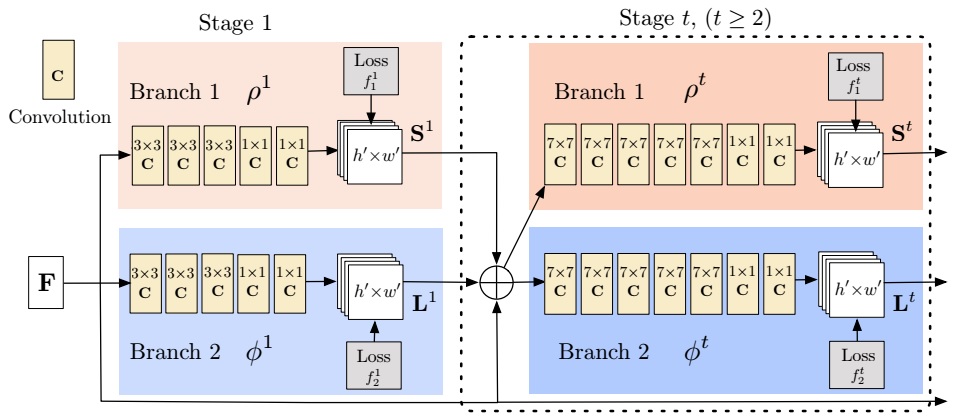
Similar with previous work, the network works as sequence learning scheme. One of the branch predicts confidence maps for part detection, while the other one predicts part affinity fields for part association.
Confidence Maps for Part Detection
At each location
It means that for every type of part, a heatmap is predicted with multiple highlight areas, indicating the emergence of a part instance.
Part Affinity Fields for Part Association
If we consider a single limb, let
Similar to confidence maps for part detection, part affinity fields are also predicted for all persons
where
where
Multi-Person Parsing using PAFs
The last problem is to select different limbs linked in PAFs to combine as one person’s skeleton. This is a classical generalized maximum clique problem. I think in additional to the method mentioned in this paper, many other optimiaztion algorithms can be tried. These algorithms are well discussed in multi-object tracking problem.
- READING NOTE: Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields
- Paper Reading:Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields
- Code note: Realtime Multi-person 2D Pose estimation using Part Affinity Fields(2)
- 行人姿态估计--Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields
- caffe openpose/Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields配置
- 姿态估计论文思路整理 -- Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields
- Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields ∗
- 论文阅读-Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields
- Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields.md
- 论文阅读:《Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields》CVPR 2017
- Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields 个人解读
- 姿态论文整理--02-Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields
- Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields ∗ 实时多人人体姿态估计论文原理讲解
- Paper Reading:Regional Multi-person Pose Estimation
- READING NOTE: Towards Accurate Multi-person Pose Estimation in the Wild
- 论文阅读:《RMPE: Regional Multi-Person Pose Estimation》ICCV 2017
- 姿态检查整理--07-RMPE: Regional Multi-Person Pose Estimation
- DeepCut: Joint Subset Partition and Labeling for Multi Person Pose Estimation
- Matlab函数
- eclipse和android studio快捷键的区别
- 二叉树的线索化
- OpenStack neutron网络Kilo-Newton版本区别
- 网页聊天中,发送消息后让滚动条显示在最下面
- READING NOTE: Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields
- java String.split()函数的用法分析
- PHP新的垃圾回收机制:Zend GC详解
- spring mvc使用@Controller返回的html视图
- Oracle 列转行函数 Listagg()
- (1)Ubuntu 14.04 搭建 LNMP配置
- Cpp 生成DLL 之坑
- UIViewController、UINavigationController、UITabBarController,这三者里面的控制器切换的区别?
- EasyUI学习之Combobox(一)


