可视化深度图像
来源:互联网 发布:小米网络音响和ai音响 编辑:程序博客网 时间:2024/05/17 23:43
在3D视窗中以点云形式进行可视化(深度图像来自于点云),另一种是将深度值映射为颜色,从而以彩色图像方式可视化深度图像,
新建工程ch4_2,新建文件range_image_visualization.cpp,填充内容如下
#include <iostream>#include <boost/thread/thread.hpp>#include <pcl/common/common_headers.h>#include <pcl/range_image/range_image.h>#include <pcl/io/pcd_io.h>#include <pcl/visualization/range_image_visualizer.h>#include <pcl/visualization/pcl_visualizer.h>#include <pcl/console/parse.h>typedef pcl::PointXYZ PointType;// --------------------// -----Parameters-----// --------------------float angular_resolution_x = 0.5f, angular_resolution_y = angular_resolution_x;pcl::RangeImage::CoordinateFrame coordinate_frame = pcl::RangeImage::CAMERA_FRAME;bool live_update = false;// --------------// -----Help-----// --------------void printUsage (const char* progName){ std::cout << "\n\nUsage: "<<progName<<" [options] <scene.pcd>\n\n" << "Options:\n" << "-------------------------------------------\n" << "-rx <float> angular resolution in degrees (default "<<angular_resolution_x<<")\n" << "-ry <float> angular resolution in degrees (default "<<angular_resolution_y<<")\n" << "-c <int> coordinate frame (default "<< (int)coordinate_frame<<")\n" << "-l live update - update the range image according to the selected view in the 3D viewer.\n" << "-h this help\n" << "\n\n";}void setViewerPose (pcl::visualization::PCLVisualizer& viewer, const Eigen::Affine3f& viewer_pose) //设置视角位置{ Eigen::Vector3f pos_vector = viewer_pose * Eigen::Vector3f(0, 0, 0); //eigen Eigen::Vector3f look_at_vector = viewer_pose.rotation () * Eigen::Vector3f(0, 0, 1) + pos_vector; Eigen::Vector3f up_vector = viewer_pose.rotation () * Eigen::Vector3f(0, -1, 0); viewer.setCameraPosition (pos_vector[0], pos_vector[1], pos_vector[2], look_at_vector[0], look_at_vector[1], look_at_vector[2], up_vector[0], up_vector[1], up_vector[2]);}// --------------// -----Main-----// --------------int main (int argc, char** argv){ // -------------------------------------- // -----Parse Command Line Arguments----- // -------------------------------------- if (pcl::console::find_argument (argc, argv, "-h") >= 0) { printUsage (argv[0]); return 0; } if (pcl::console::find_argument (argc, argv, "-l") >= 0) { live_update = true; std::cout << "Live update is on.\n"; } if (pcl::console::parse (argc, argv, "-rx", angular_resolution_x) >= 0) std::cout << "Setting angular resolution in x-direction to "<<angular_resolution_x<<"deg.\n"; if (pcl::console::parse (argc, argv, "-ry", angular_resolution_y) >= 0) std::cout << "Setting angular resolution in y-direction to "<<angular_resolution_y<<"deg.\n"; int tmp_coordinate_frame; if (pcl::console::parse (argc, argv, "-c", tmp_coordinate_frame) >= 0) { coordinate_frame = pcl::RangeImage::CoordinateFrame (tmp_coordinate_frame); std::cout << "Using coordinate frame "<< (int)coordinate_frame<<".\n"; } angular_resolution_x = pcl::deg2rad (angular_resolution_x); angular_resolution_y = pcl::deg2rad (angular_resolution_y); // ------------------------------------------------------------------ // -----Read pcd file or create example point cloud if not given----- // ------------------------------------------------------------------ pcl::PointCloud<PointType>::Ptr point_cloud_ptr (new pcl::PointCloud<PointType>); pcl::PointCloud<PointType>& point_cloud = *point_cloud_ptr; Eigen::Affine3f scene_sensor_pose (Eigen::Affine3f::Identity ()); std::vector<int> pcd_filename_indices = pcl::console::parse_file_extension_argument (argc, argv, "pcd"); if (!pcd_filename_indices.empty ()) { std::string filename = argv[pcd_filename_indices[0]]; if (pcl::io::loadPCDFile (filename, point_cloud) == -1) { std::cout << "Was not able to open file \""<<filename<<"\".\n"; printUsage (argv[0]); return 0; } scene_sensor_pose = Eigen::Affine3f (Eigen::Translation3f (point_cloud.sensor_origin_[0], point_cloud.sensor_origin_[1], point_cloud.sensor_origin_[2])) * Eigen::Affine3f (point_cloud.sensor_orientation_); } else { std::cout << "\nNo *.pcd file given => Genarating example point cloud.\n\n"; for (float x=-0.5f; x<=0.5f; x+=0.01f) { for (float y=-0.5f; y<=0.5f; y+=0.01f) { PointType point; point.x = x; point.y = y; point.z = 2.0f - y; point_cloud.points.push_back (point); } } point_cloud.width = (int) point_cloud.points.size (); point_cloud.height = 1; } // ----------------------------------------------- // -----Create RangeImage from the PointCloud----- // ----------------------------------------------- float noise_level = 0.0; float min_range = 0.0f; int border_size = 1; boost::shared_ptr<pcl::RangeImage> range_image_ptr(new pcl::RangeImage); pcl::RangeImage& range_image = *range_image_ptr; range_image.createFromPointCloud (point_cloud, angular_resolution_x, angular_resolution_y, pcl::deg2rad (360.0f), pcl::deg2rad (180.0f), scene_sensor_pose, coordinate_frame, noise_level, min_range, border_size); // -------------------------------------------- // -----Open 3D viewer and add point cloud----- // -------------------------------------------- /***************************************************************************************** 创建3D视窗对象,将背景颜色设置为白色,添加黑色的,点云大小为1的深度图像(点云),并使用Main函数 上面定义的setViewerPose函数设置深度图像的视点参数,被注释的部分用于添加爱坐标系,并对原始点云进行可视化 *****************************************************************************************/ pcl::visualization::PCLVisualizer viewer ("3D Viewer"); //定义初始化可视化对象 viewer.setBackgroundColor (1, 1, 1); //背景设置为白色 pcl::visualization::PointCloudColorHandlerCustom<pcl::PointWithRange> range_image_color_handler (range_image_ptr, 0, 0, 0); //设置自定义颜色 viewer.addPointCloud (range_image_ptr, range_image_color_handler, "range image"); viewer.setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "range image"); //viewer.addCoordinateSystem (1.0f, "global"); //PointCloudColorHandlerCustom<PointType> point_cloud_color_handler (point_cloud_ptr, 150, 150, 150); //viewer.addPointCloud (point_cloud_ptr, point_cloud_color_handler, "original point cloud"); viewer.initCameraParameters (); setViewerPose(viewer, range_image.getTransformationToWorldSystem ()); // -------------------------- // -----Show range image----- // -------------------------- //用以图像的方式可视化深度图像,图像的颜色取决于深度值 pcl::visualization::RangeImageVisualizer range_image_widget ("Range image"); range_image_widget.showRangeImage (range_image); //图像可视化方式显示深度图像 //-------------------- // -----Main loop----- //-------------------- while (!viewer.wasStopped ()) //启动主循环以保证可视化代码的有效性,直到可视化窗口关闭 { range_image_widget.spinOnce (); //用于处理深度图像可视化类的当前事件 viewer.spinOnce (); //用于处理3D窗口当前的事件此外还可以随时更新2D深度图像,以响应可视化窗口中的当前视角,这通过命令行-1来激活 pcl_sleep (0.01); //首先从窗口中得到当前的观察位置,然后创建对应视角的深度图像,并在图像显示插件中显示 if (live_update) { scene_sensor_pose = viewer.getViewerPose(); range_image.createFromPointCloud (point_cloud, angular_resolution_x, angular_resolution_y, pcl::deg2rad (360.0f), pcl::deg2rad (180.0f), scene_sensor_pose, pcl::RangeImage::LASER_FRAME, noise_level, min_range, border_size); range_image_widget.showRangeImage (range_image); } }}
编译结束运行可执行文件的结果为:
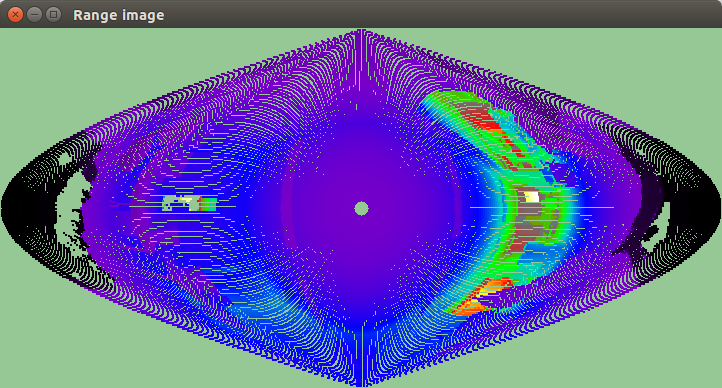
运行 ./range_image_visualization(没有指定.pcd文件)

使用自动生成的矩形空间点云,这里有两个窗口,一个是点云的3D可视化窗口,一个是深度图像的可视化窗口,在该窗口图像的颜色由深度决定。
当然如果指定PCD文件也可以 比如:./range_image_visualization room_scan1.pcd 其结果
微信公众号号可扫描二维码一起共同学习交流

0 0
- 可视化深度图像
- PCL系列——如何可视化深度图像
- 深度可视化语义表述和图像描述实验
- 【图像分割】NVIDIA深度学习训练系统——实现图像分割与网络分割可视化
- NVIDIA深度学习训练系统——实现图像分割与网络分割可视化
- 深度学习中的可视化
- 深度神经网络可视化工具
- 深度图像
- 图像深度
- 图像深度
- 图像深度
- 深度图像
- 图像深度
- 深度学习 网络结构 可视化
- Keras深度学习模型可视化
- 深度学习网络模型可视化
- 直方图可视化,图像阈值化
- 逐层可视化图像特征
- js判断是否手机端进行地址跳转
- 基于octree的空间划分及搜索操作
- PCLVisualizer可视化类
- 基础环境搭建
- 文本分析--数据收集
- 可视化深度图像
- 关于getline()函数
- LeetCode 153 Find Minimum in Rotated Sorted Array
- 工厂模式(Factory Pattern)
- PCL滤波介绍(1)
- 题目:Opencv中利用光流法对物体进行检测
- PCL滤波介绍(2)
- 【远程调用框架】如何实现一个简单的RPC框架(四)优化二:改变底层通信框架
- PCL滤波介绍(3)


