Iterative Semi-Global Matching [iSGM]
来源:互联网 发布:沙漏计时器软件 编辑:程序博客网 时间:2024/05/21 05:18
Submitted on 27 Jun. 2012 05:56 by
Simon Hermann (The University of Auckland)
Running time: 8 sEnvironment: 2 cores @ 2.5 Ghz (C/C++)
Method Description:
The conceptual parallel scan-line integration strategy of standard SGM is translated into an iterative scheme. The accumulation buffer is evaluated to a prior disparity map after horizontal and after vertical integration. The results serve as input to generate a novel data structure, thesemi-global distance map (SGDM), that allows a fast analysis of spatial disparity information. This information is used to reduce thesearch-space and also increases the robustness of the final solution, especially in case of weak underlying stereo data.
The method is coupled with a coarse-to-fine approach where
costs rather than disparities are upscaled. Full left-right
consistency checks are performed throughout the method.
Run-time without SSE-optimization and without GPU usage.
Parameters:The method is coupled with a coarse-to-fine approach where
costs rather than disparities are upscaled. Full left-right
consistency checks are performed throughout the method.
Run-time without SSE-optimization and without GPU usage.
P1=35
P2=350
search space=[0,255]
Latex Bibtex:P2=350
search space=[0,255]
@INPROCEEDINGS{HERM2012,
author = {Simon Hermann and Reinhard Klette},
title = {Iterative Semi-Global Matching for Robust Driver
Assistance Systems},
booktitle = {ACCV},
year = {2012}
}
author = {Simon Hermann and Reinhard Klette},
title = {Iterative Semi-Global Matching for Robust Driver
Assistance Systems},
booktitle = {ACCV},
year = {2012}
}
Detailed Results
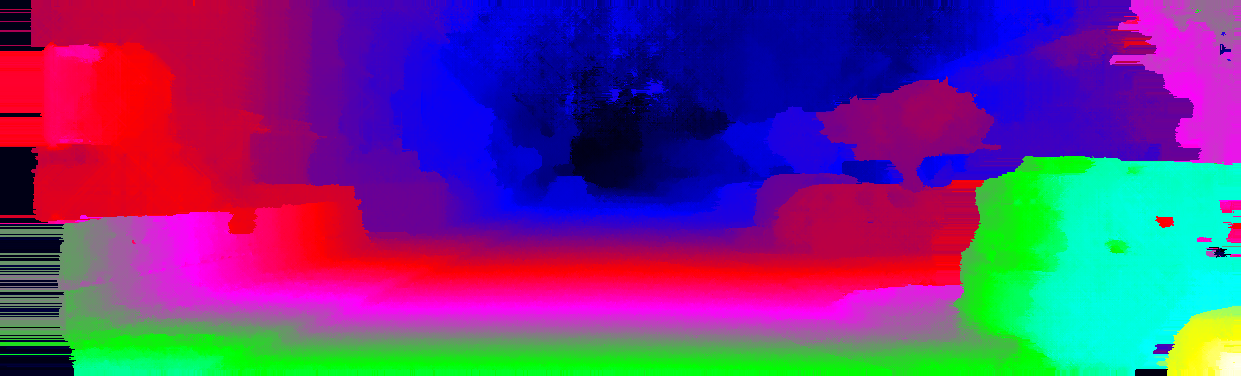
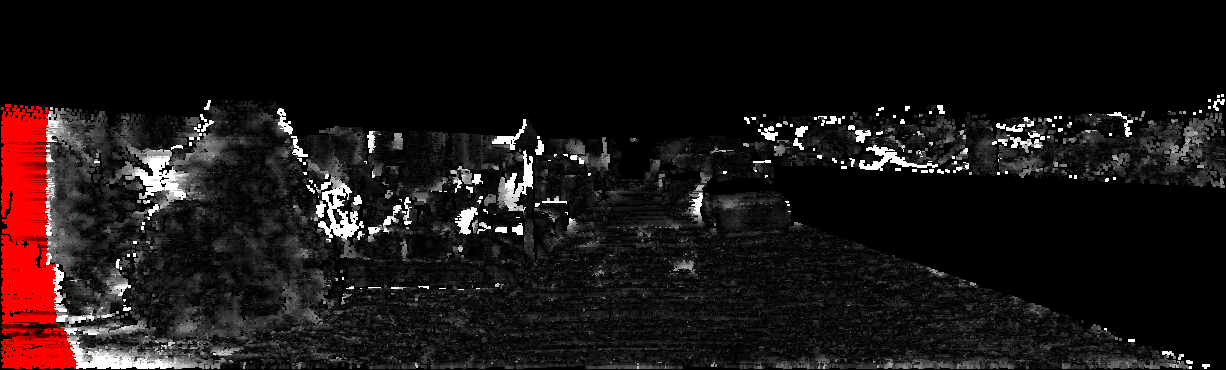
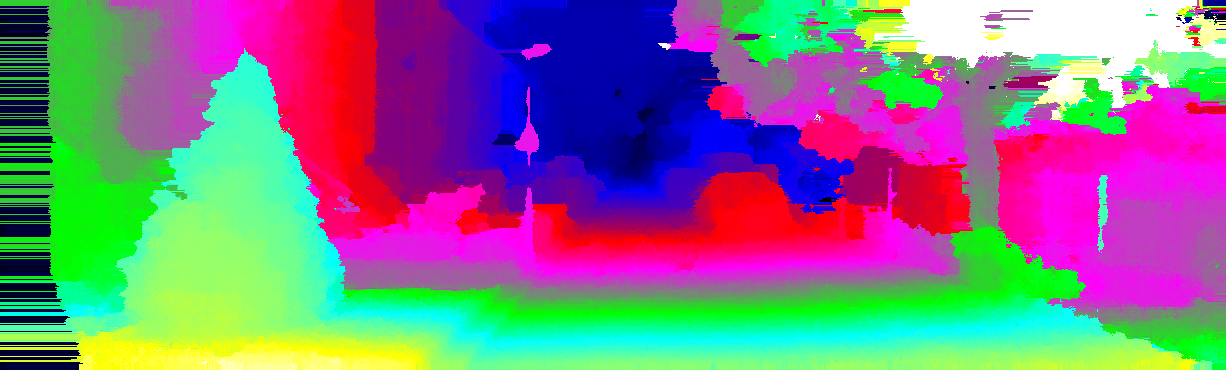
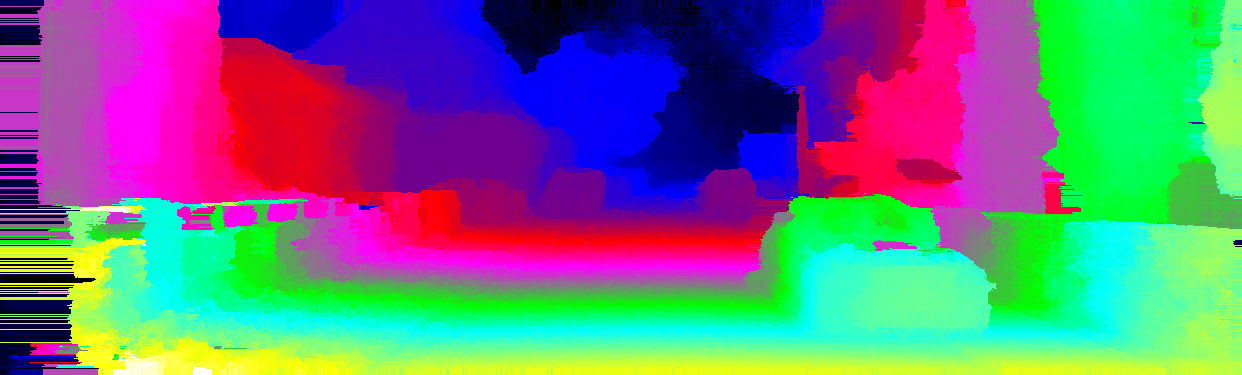
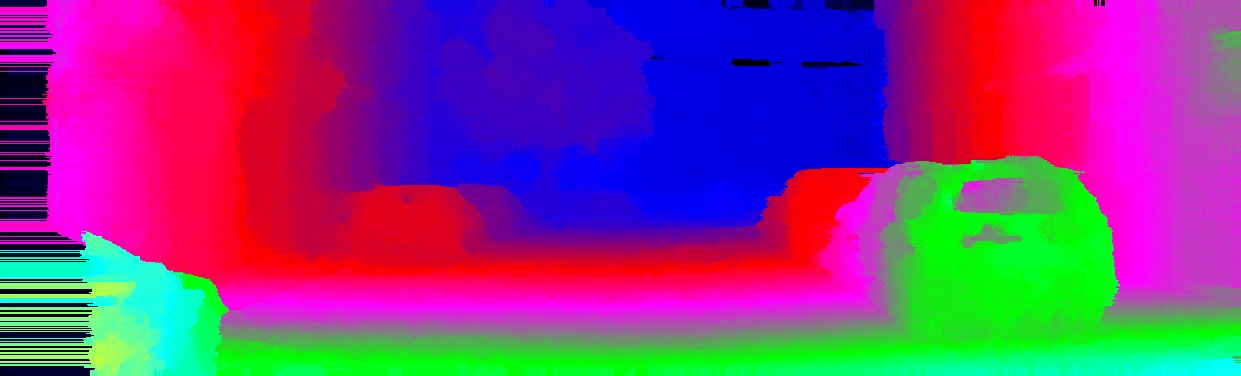
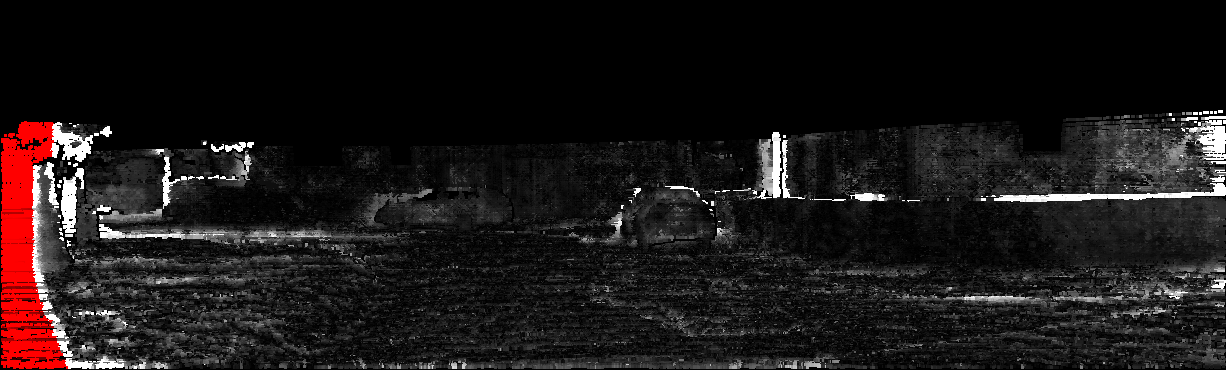
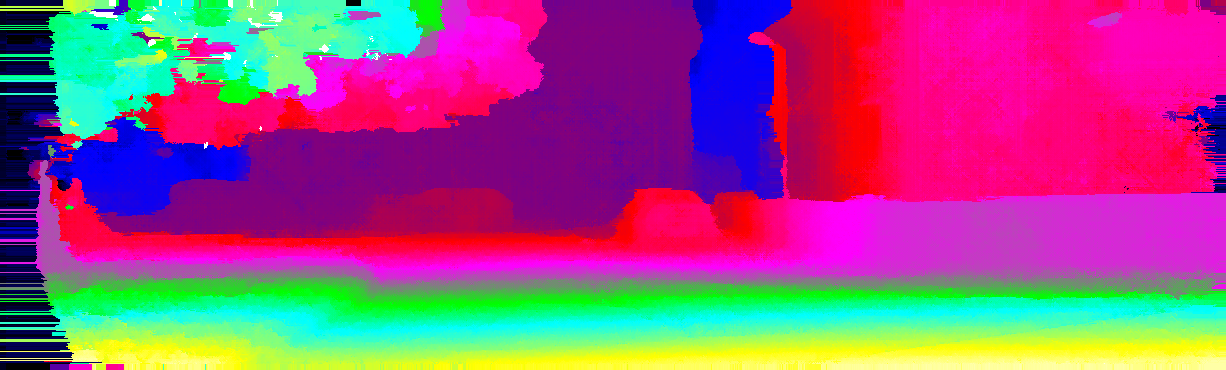
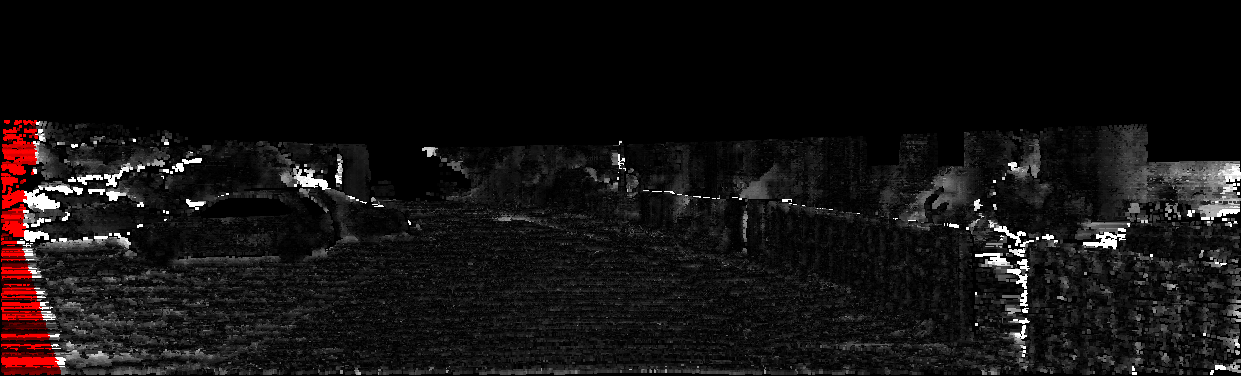
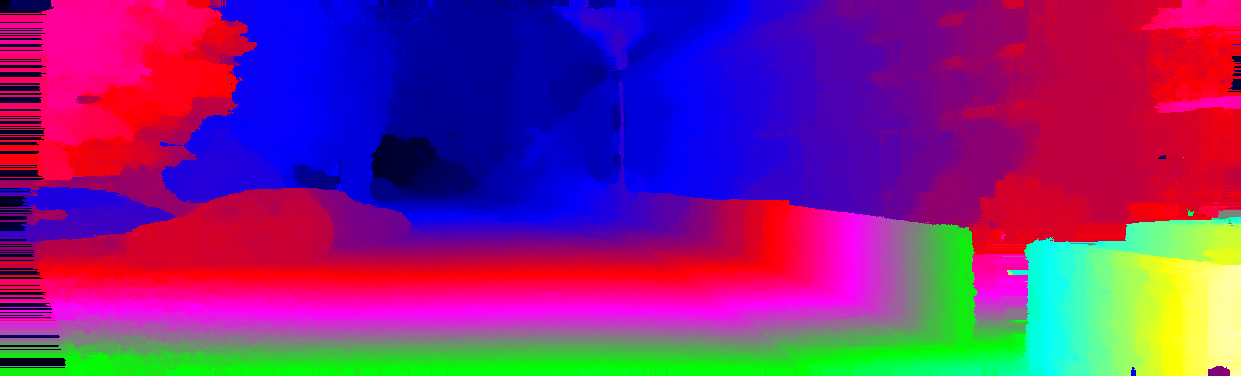
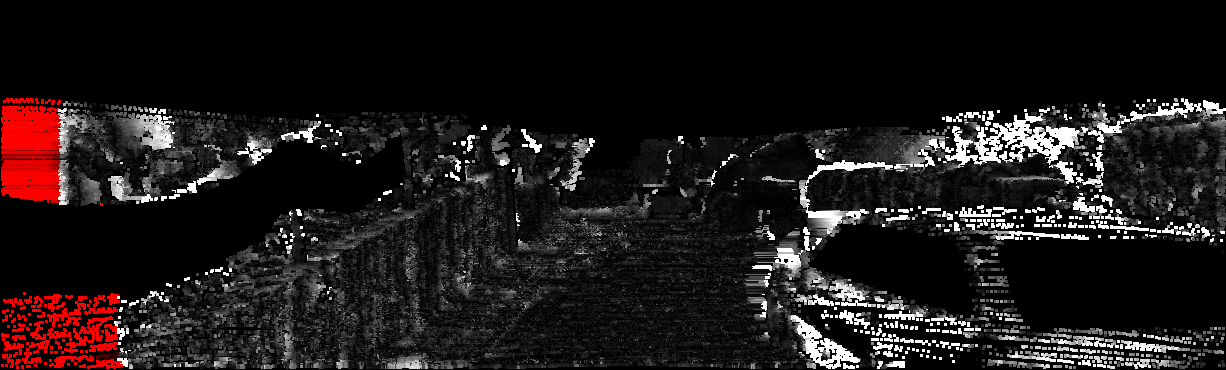
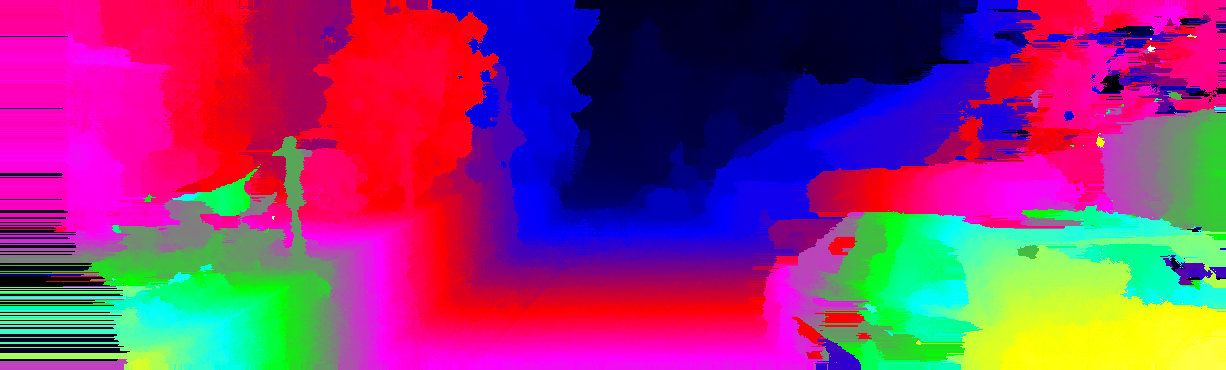
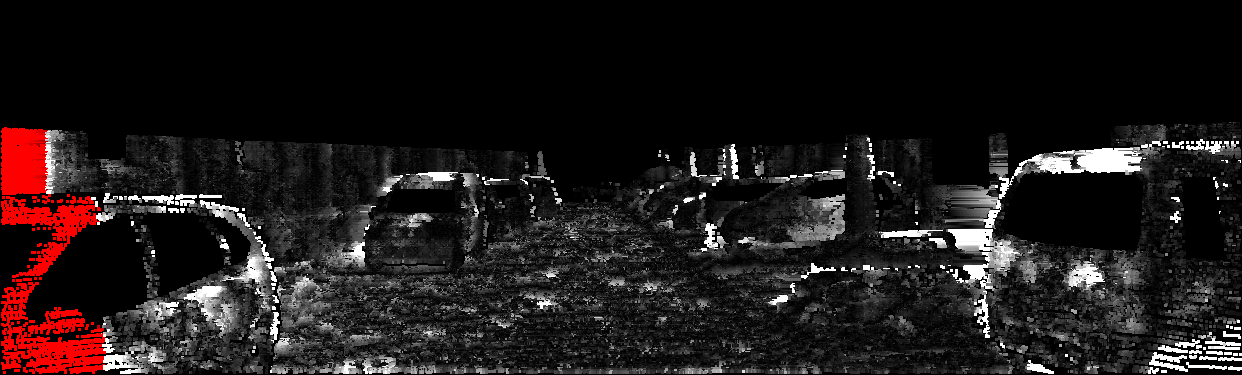
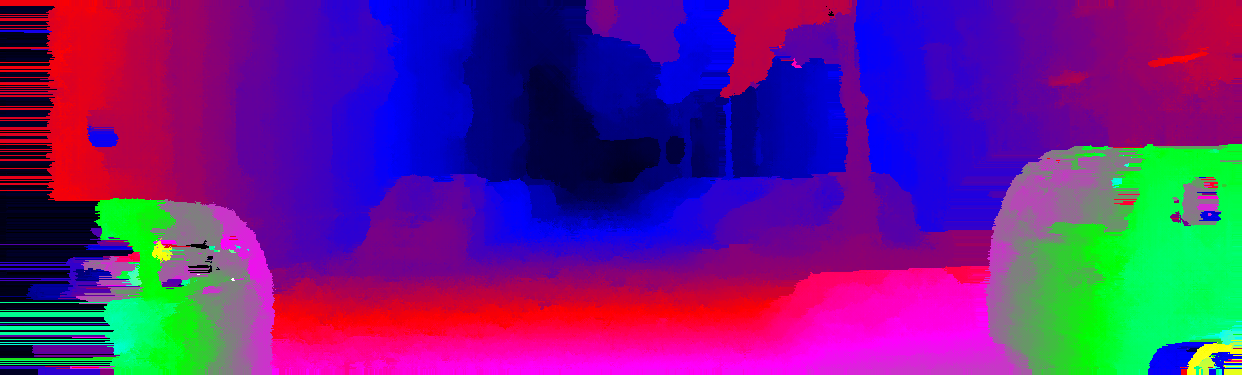
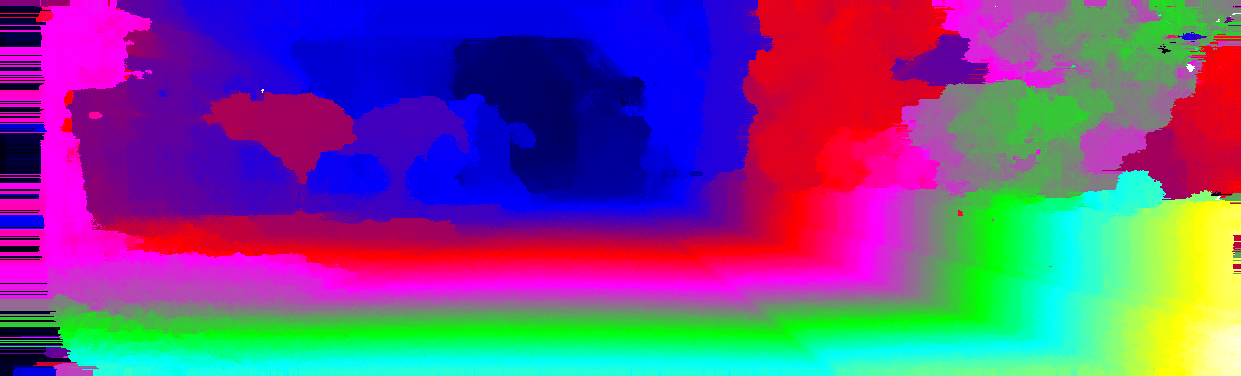
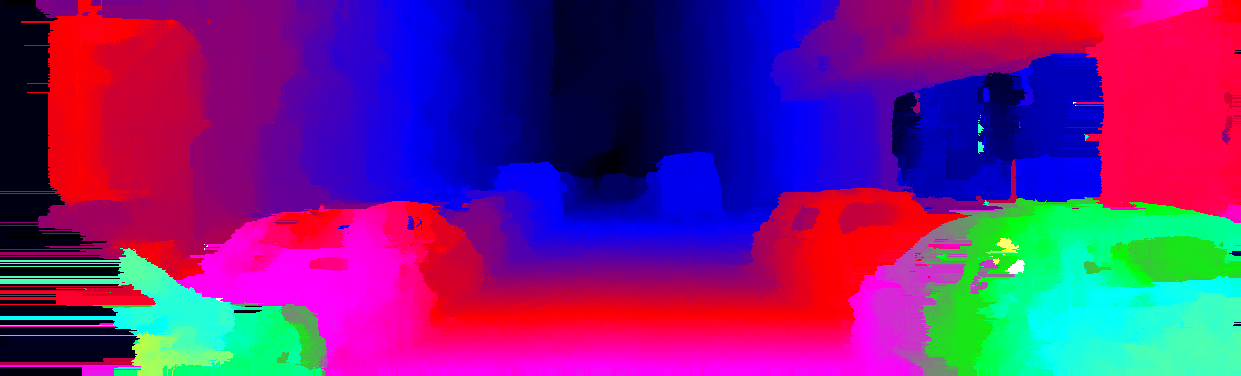
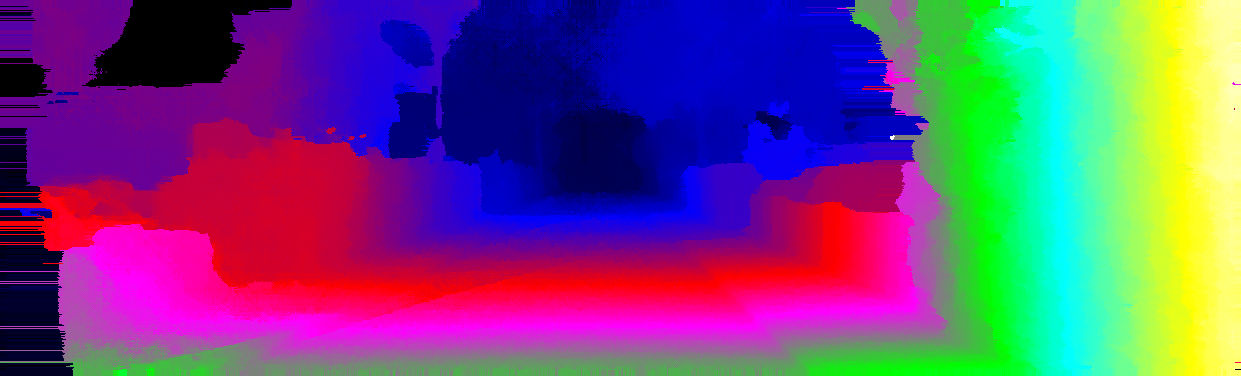
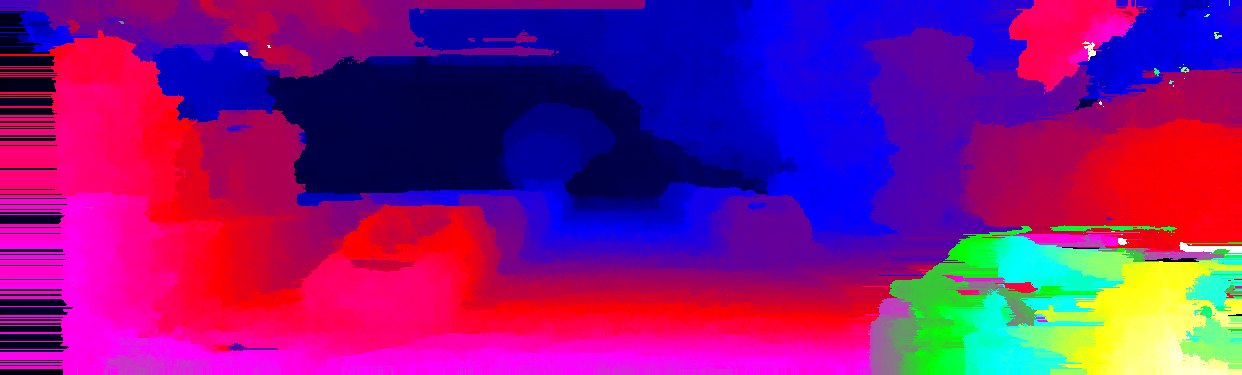
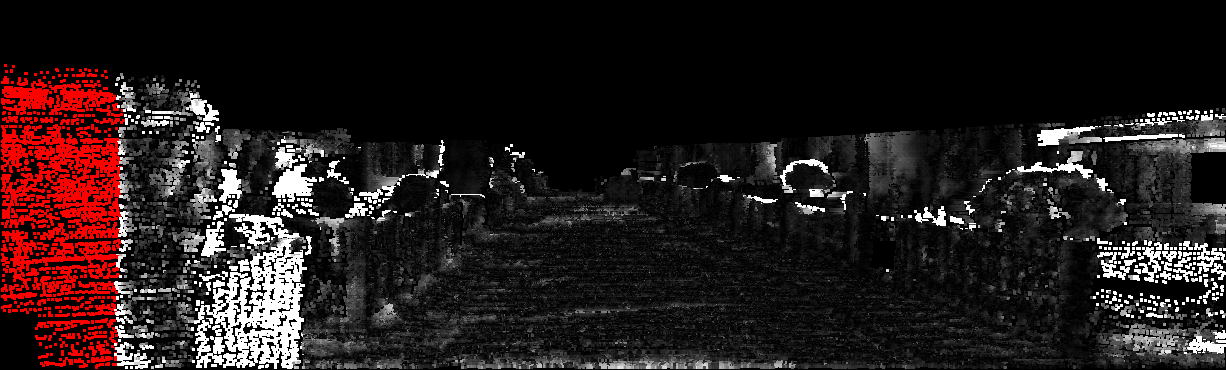
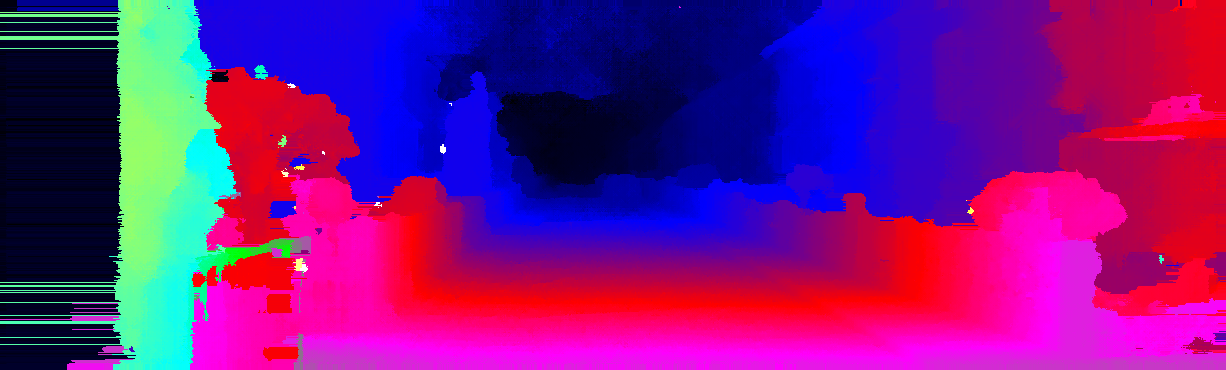
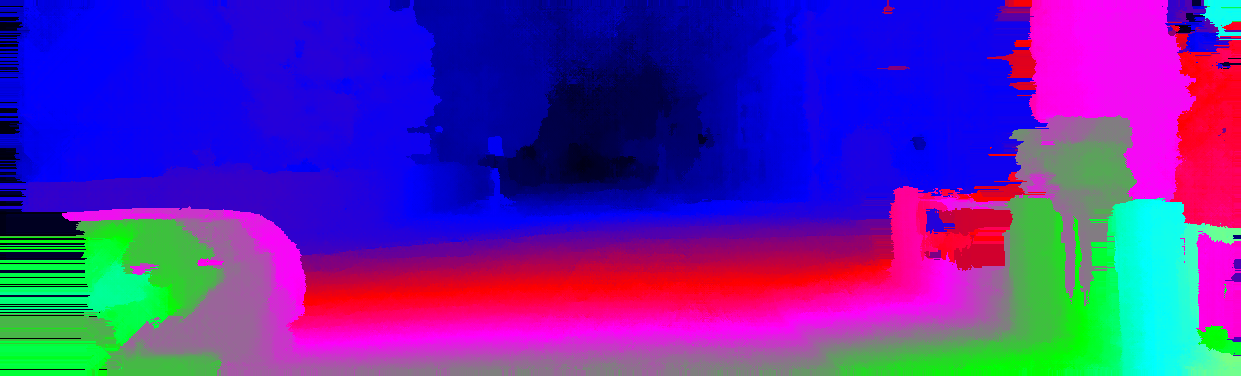
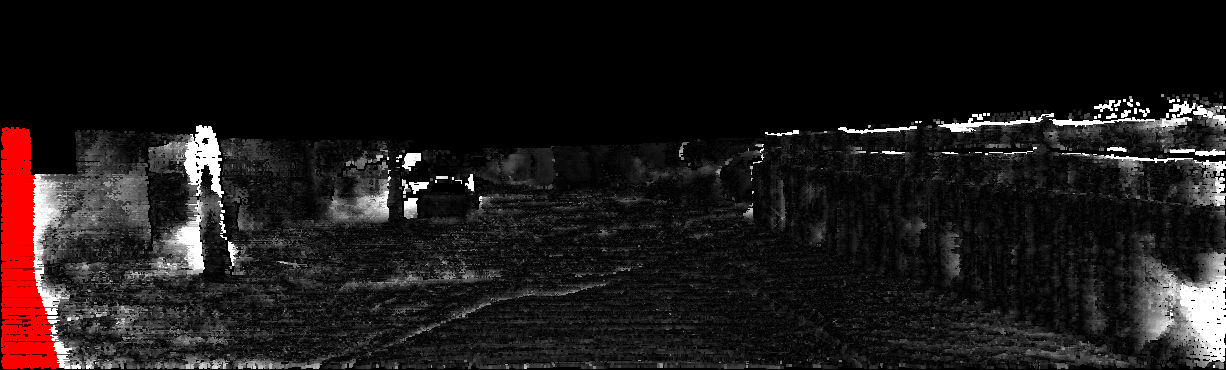
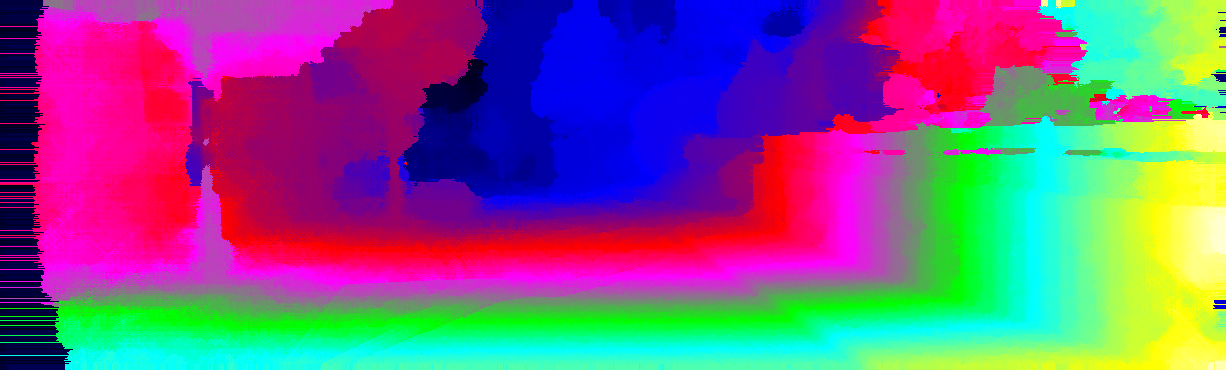
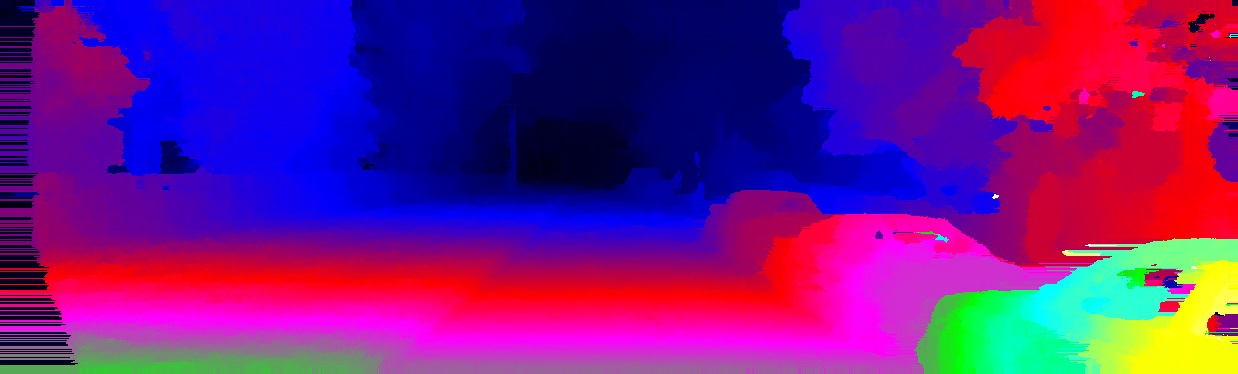
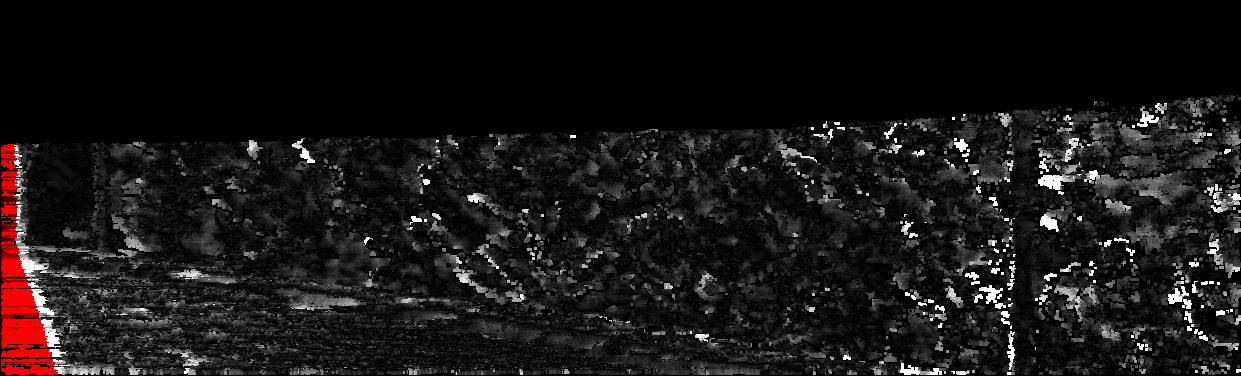
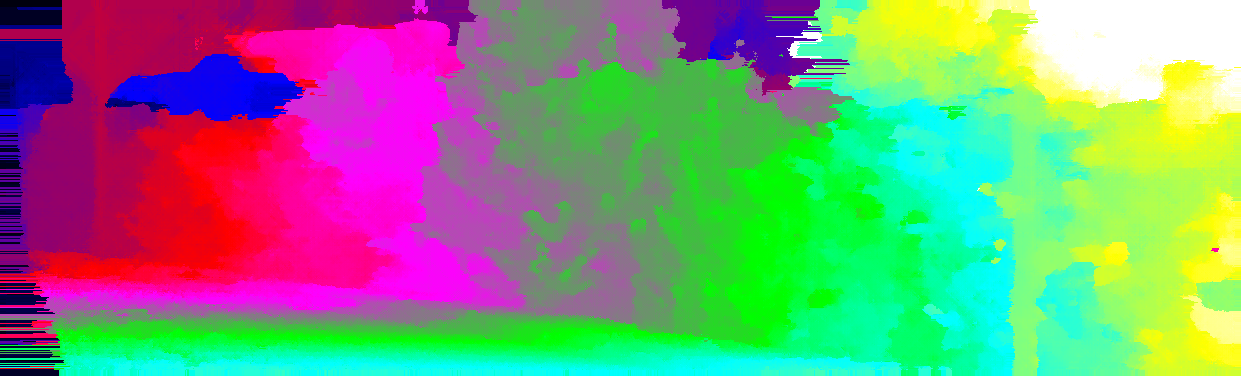
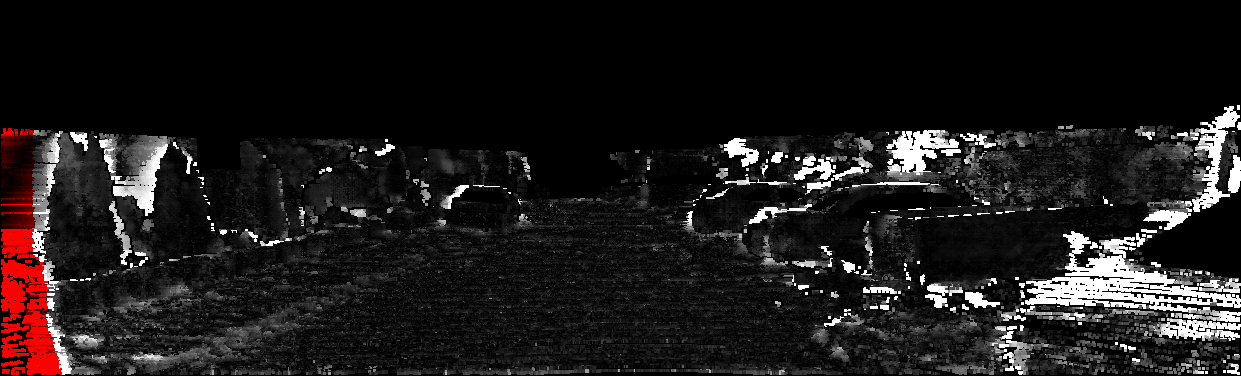
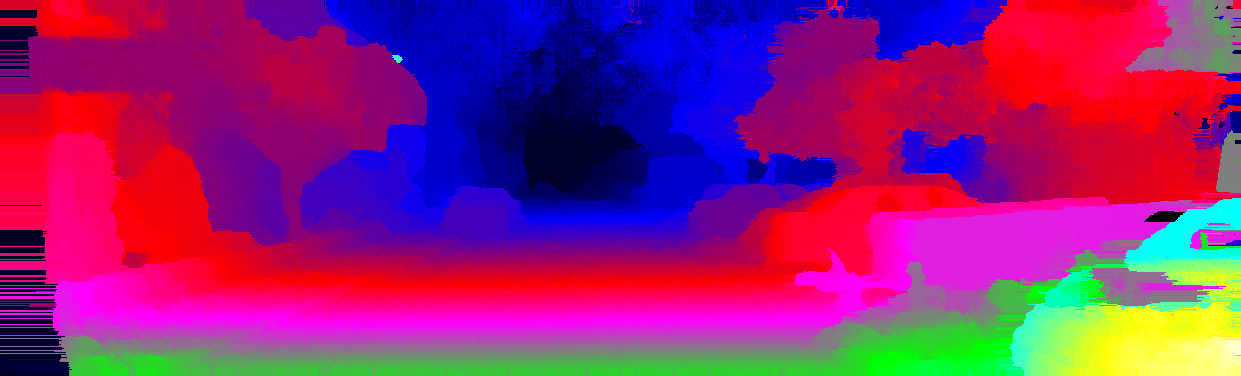
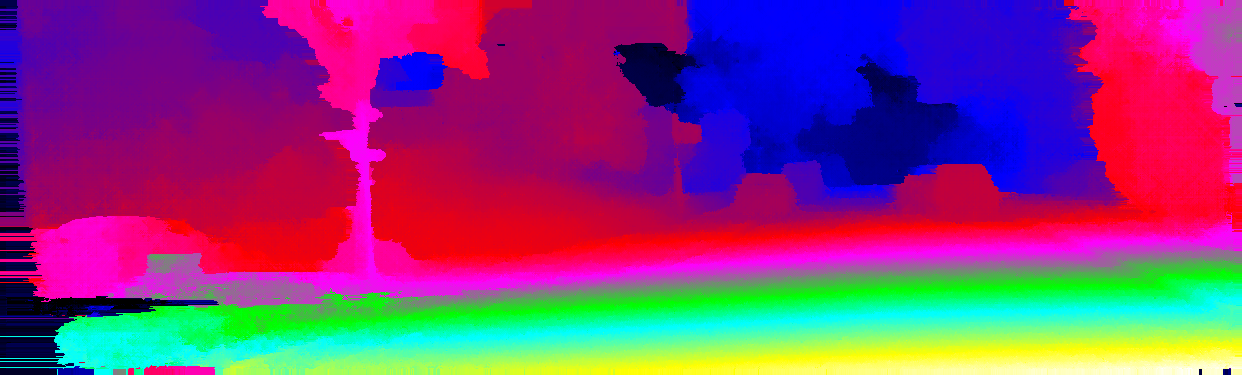
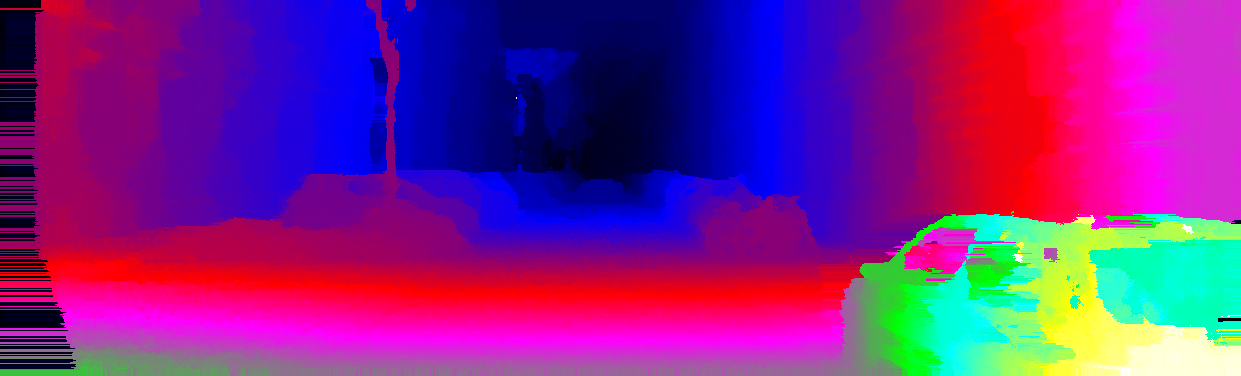
This page provides detailed results for the method(s) selected. For each of the first 20 test images, the number of erroneous pixels at all thresholds is depicted in the table. Underneath, the left input image, the disparity / end-point error map and the estimated (and interpolated) disparity / optical flow map are shown. The error map scales linearly between 0 (black) and >=5 (white) pixels error. Red denotes all occluded pixels, falling outside the image boundaries. The false color map is scaled to the largest ground truth disparity / flow value.
Test Set Average
Reflective Regions
Test Image 0


Test Image 1

Test Image 2


Test Image 3


Test Image 4

Test Image 5

Test Image 6

Test Image 7

Test Image 8


Test Image 9


Test Image 10


Test Image 11


Test Image 12

Test Image 13


Test Image 14

Test Image 15


Test Image 16

Test Image 17

Test Image 18


Test Image 19


0 0
- Iterative Semi-Global Matching [iSGM]
- SGM(semi-global matching)算法原理
- Semi-Global Matching(SGM)算法原文理解
- SGM-Nets: Semi-global matching with neural networks
- 经典算法Semi-Global Matching(SGM)文献笔记(一)
- 经典算法Semi-Global Matching(SGM)文献笔记(二)
- Stereo Processing by Semi-Global Matching and Mutual Information 论文翻译
- Stereo Matching文献笔记之(九):经典算法Semi-Global Matching(SGM)之神奇的HMI代价计算~
- Stereo Matching文献笔记之(十):经典算法Semi-Global Matching(SGM)之碉堡的动态规划~
- Stereo Matching文献笔记之(二):经典算法Semi-Global Matching(SGM)之神奇的HMI代价计算~
- Stereo Matching文献笔记之(三):经典算法Semi-Global Matching(SGM)之碉堡的动态规划
- Stereo Matching文献笔记之(九):经典算法Semi-Global Matching(SGM)之神奇的HMI代价计算~
- Stereo Matching文献笔记之(十):经典算法Semi-Global Matching(SGM)之碉堡的动态规划~
- Stereo Matching文献笔记之(九):经典算法Semi-Global Matching(SGM)之神奇的HMI代价计算~
- Stereo Matching文献笔记之(十):经典算法Semi-Global Matching(SGM)之碉堡的动态规划~
- Iterative Deepening
- Iterative Pruning
- iterative-mergesort
- MySQL创建用户与授权方法
- js判断用户的浏览器设备是移动端还是pc端
- Diameter of Binary Tree
- Android Studio debug.keystore位置
- 测试看看
- Iterative Semi-Global Matching [iSGM]
- BIEE 12c启用Lightweight SSO 解决VA需要额外登录的问题
- 不同版本Eclipse对JDK版本要求
- java编译时与运行时概念明晰
- HTTP状态码
- 3D XPoint工作原理
- 不正经运维狗的文档1—15
- SparkSQL之创建DataFrame
- ZOJ 2418Matrix


