最新版的OpenCV中新增加的ORB特征的使用
来源:互联网 发布:腾讯代理绝地求生优化 编辑:程序博客网 时间:2024/06/06 09:35
看到OpenCV2.3.1里面ORB特征提取算法也在里面了,套用给的SURF特征例子程序改为ORB特征一直提示错误,类型不匹配神马的,由于没有找到示例程序,只能自己找答案。
(ORB特征论文:ORB: an efficient alternative to SIFT or SURF.点击下载论文)
经过查找发现:
描述符数据类型有是float的,比如说SIFT,SURF描述符,还有是uchar的,比如说有ORB,BRIEF
对于float 匹配方式有:
FlannBased
BruteForce<L2<float> >
BruteForce<SL2<float> >
BruteForce<L1<float> >
对于uchar有:
BruteForce<Hammin>
BruteForce<HammingLUT>
另外: SURF SIFT
/*
SIFT sift;
sift(img_1, Mat(), keyPoints_1, descriptors_1);
sift(img_2, Mat(), keyPoints_2, descriptors_2);
BruteForceMatcher<L2<float> > matcher;
*/
/*
SURF surf;
surf(img_1, Mat(), keyPoints_1);
surf(img_2, Mat(), keyPoints_2);
SurfDescriptorExtractor extrator;
extrator.compute(img_1, keyPoints_1, descriptors_1);
extrator.compute(img_2, keyPoints_2, descriptors_2);
BruteForceMatcher<L2<float> > matcher;
*/
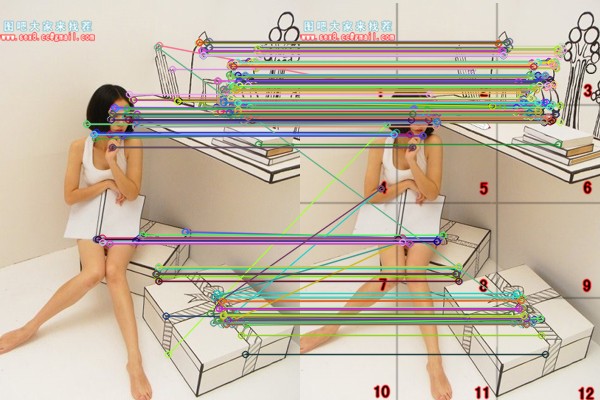
另外一个是寻找目标匹配
在右边的场景图里面寻找左边那幅图的starbucks标志
效果如下:

需要在之前的那个imshow之前加上如下代码即可完成一个简单的功能展示:
- 最新版的OpenCV中新增加的ORB特征的使用
- 最新版的OpenCV中新增加的ORB特征的使用
- OpenCV的ORB特征提取算法
- OpenCV的ORB特征提取算法
- OpenCv的sift surf orb等特征点检测
- OpenCV中ORB代码的参数
- 使用RANSAC提纯ORB和BRISK特征点,达到鲁棒匹配的效果(OpenCV 2.4.13下,源码)
- Opencv学习笔记(二)———Opencv3中ORB算法的使用
- unity 5.3 中新增加的 Attribute
- Java8中新增加的集合类
- Java8中新增加的集合类
- Java8中新增加的集合类
- 图像特征检测描述(一):SIFT、SURF、ORB、HOG、LBP特征的原理概述及OpenCV代码实现
- 图像特征检测描述(一):SIFT、SURF、ORB、HOG、LBP特征的原理概述及OpenCV代码实现
- 基于opencv的ORB算法的提取
- opencv ORB各参数的含义
- sql2k中新增加的Function的sqlbook的帮助
- sql2k中新增加的Function的sqlbook 的帮助
- java学习笔记--基础、类
- TensorFlow实战14:实现估值网络(强化学习二)
- 51nod-加农炮
- HAProxy安装配置详解
- solrcloud 报 HTTP Status 503
- 最新版的OpenCV中新增加的ORB特征的使用
- git detachhead在回滚代码的时候的使用
- 归并排序
- eclipse的maven项目导入第三方jar包到pom.xml的方法
- JUnit使用(二)
- PHP调试的时候遇到Warning: session_start() [function.session-
- 理解Java内存模型
- bash数据流重定向与管道
- Android 在 Eclipse 项目中使用 Leakcanary 内存泄露检测


