Webrtc delay-base-bwe代码分析(5): AimdRateControl模块
来源:互联网 发布:数据库内找账号密码 编辑:程序博客网 时间:2024/06/01 16:11
@(webrtc)[webrtc, congestion control]
Webrtc delay-base-bwe代码分析(5): AimdRateControl模块
0. 简介
这个模块是根据OveruseDetector模块计算出来的状态来维护码率控制模块的自动状态机,并更新估算出来的对端发送速率,提供给REMB进行反馈。
1. 原理
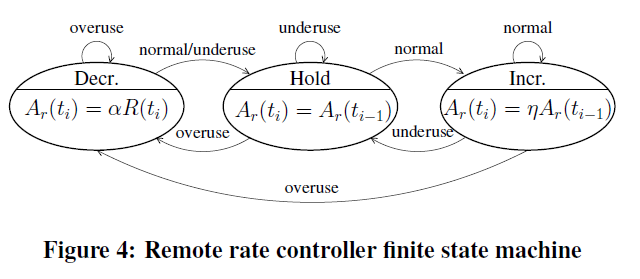
一共维持三个状态,增长、保持、衰减,状态转换根据OveruseDetector的三个状态(Normal, Overuse, Underuse)来进行判断。
- 当Overuse发生时,无论什么状态都进入衰减。
- 当Underuse发生时,无论什么状态都进入保持状态。
- 在保持和增长阶段,Normal状态将保持继续增长。
- 在衰减阶段,Normal状态会将状态拉回保持状态。
2. 代码
核心函数为ChangeBitrate,其他部分代码比较简单这里不贴了。
uint32_t AimdRateControl::ChangeBitrate(uint32_t current_bitrate_bps, uint32_t incoming_bitrate_bps, int64_t now_ms) { // 在调用函数update更新对应的链路状态估计,累积码率,噪声值后 // 会将updated置位,如果没置位则不会去更新码率。 if (!updated_) { return current_bitrate_bps_; } // An over-use should always trigger us to reduce the bitrate, even though // we have not yet established our first estimate. By acting on the over-use, // we will end up with a valid estimate. // 初始化未完成,如果不是一开始就Overuse,直接返回初始的码率即可。 if (!bitrate_is_initialized_ && current_input_.bw_state != kBwOverusing) return current_bitrate_bps_; updated_ = false; // 这里对状态进行转换,这个函数是状态机状态转换函数 // 1. Underuse总是进入Hold状态。 // 2. Overuse总是进入Dec状态。 // 3. Normal状态维持,除非当前在Hold状态,此时会进入Inc状态。 ChangeState(current_input_, now_ms); // Calculated here because it's used in multiple places. const float incoming_bitrate_kbps = incoming_bitrate_bps / 1000.0f; // Calculate the max bit rate std dev given the normalized // variance and the current incoming bit rate. const float std_max_bit_rate = sqrt(var_max_bitrate_kbps_ * avg_max_bitrate_kbps_); switch (rate_control_state_) { // 保持状态不更新码率 case kRcHold: break; case kRcIncrease: // 三个状态,在最大值附近,超过最大值,比最大值高到不知道哪里去 // 最大均值已初始化,且当前码率高于最大值加上三倍方差,此时进入 // 比最大值高到不知道哪里去的状态,同时认为这个均值并不是很好使,复位。 // Above声明了,但是没有找到相应调用点。 if (avg_max_bitrate_kbps_ >= 0 && incoming_bitrate_kbps > avg_max_bitrate_kbps_ + 3 * std_max_bit_rate) { ChangeRegion(kRcMaxUnknown); avg_max_bitrate_kbps_ = -1.0; } // if (rate_control_region_ == kRcNearMax) { // Approximate the over-use estimator delay to 100 ms. // 已经接近最大值了,此时增长需谨慎,加性增加。 const int64_t response_time = rtt_ + 100; uint32_t additive_increase_bps = AdditiveRateIncrease( now_ms, time_last_bitrate_change_, response_time); current_bitrate_bps += additive_increase_bps; } else { // 由于没有Above状态的使用,因此认为比最大值高到不知道哪里去的状态属于 // 上界未定,放开手倍增码率。 uint32_t multiplicative_increase_bps = MultiplicativeRateIncrease( now_ms, time_last_bitrate_change_, current_bitrate_bps); current_bitrate_bps += multiplicative_increase_bps; } time_last_bitrate_change_ = now_ms; break; case kRcDecrease: bitrate_is_initialized_ = true; if (incoming_bitrate_bps < min_configured_bitrate_bps_) { // 真的不能再低了.... current_bitrate_bps = min_configured_bitrate_bps_; } else { // Set bit rate to something slightly lower than max // to get rid of any self-induced delay. current_bitrate_bps = static_cast<uint32_t>(beta_ * incoming_bitrate_bps + 0.5); if (current_bitrate_bps > current_bitrate_bps_) { // 本次速率仍然在增长 // Avoid increasing the rate when over-using. if (rate_control_region_ != kRcMaxUnknown) { // 如果上界可靠,则将码率设置在最大均值的beta_倍处, // 默认的beta_为0.85,同paper。 current_bitrate_bps = static_cast<uint32_t>( beta_ * avg_max_bitrate_kbps_ * 1000 + 0.5f); } // 进行修正,和上一轮迭代的码率取小,如果上界不定 // 则取上一次迭代的码率值。 current_bitrate_bps = std::min(current_bitrate_bps, current_bitrate_bps_); } // 更新过新的码率值后,认为现在已经在最大均值附近。 // 注意,每次认为上界无效时,总会把最大均值复位 // 这里设置完对应状态后,即使上界无效,下面总会更新一个最大均值。 ChangeRegion(kRcNearMax); if (incoming_bitrate_kbps < avg_max_bitrate_kbps_ - 3 * std_max_bit_rate) { // 当前速率小于均值较多,认为均值不可靠,复位 avg_max_bitrate_kbps_ = -1.0f; } // 衰减状态下需要更新最大均值 UpdateMaxBitRateEstimate(incoming_bitrate_kbps); } // Stay on hold until the pipes are cleared. // 降低码率后回到HOLD状态,如果网络状态仍然不好,在Overuse仍然会进入Dec状态。 // 如果恢复,则不会是Overuse,会保持或增长。 ChangeState(kRcHold); time_last_bitrate_change_ = now_ms; break; default: assert(false); } if ((incoming_bitrate_bps > 100000 || current_bitrate_bps > 150000) && current_bitrate_bps > 1.5 * incoming_bitrate_bps) { // Allow changing the bit rate if we are operating at very low rates // Don't change the bit rate if the send side is too far off current_bitrate_bps = current_bitrate_bps_; time_last_bitrate_change_ = now_ms; } return current_bitrate_bps;}加性码率增长代码如下:
uint32_t AimdRateControl::AdditiveRateIncrease( int64_t now_ms, int64_t last_ms, int64_t response_time_ms) const { assert(response_time_ms > 0); double beta = 0.0; if (last_ms > 0) { // 时间间隔和RTT之比作为系数。 // 疑问,这里的时间点是经过采样的,可能会大于rtt? beta = std::min((now_ms - last_ms) / static_cast<double>(response_time_ms), 1.0); if (in_experiment_) beta /= 2.0; } // 默认30fps,由于每个包不超过mtu,一般也就1100+,用这两个值估计每帧码率和每帧包数。 // 并计算平均每个包的大小,最终增加的比特数不超过1000。 double bits_per_frame = static_cast<double>(current_bitrate_bps_) / 30.0; double packets_per_frame = std::ceil(bits_per_frame / (8.0 * 1200.0)); double avg_packet_size_bits = bits_per_frame / packets_per_frame; uint32_t additive_increase_bps = std::max( 1000.0, beta * avg_packet_size_bits); return additive_increase_bps;}乘性部分比较简单,也是根据时间差来调整系数。
uint32_t AimdRateControl::MultiplicativeRateIncrease( int64_t now_ms, int64_t last_ms, uint32_t current_bitrate_bps) const { double alpha = 1.08; if (last_ms > -1) { // 系数计算与文档中的1.05略有不同,使用时间差作为系数,1.08作为底数。 int time_since_last_update_ms = std::min(static_cast<int>(now_ms - last_ms), 1000); alpha = pow(alpha, time_since_last_update_ms / 1000.0); } uint32_t multiplicative_increase_bps = std::max( current_bitrate_bps * (alpha - 1.0), 1000.0); return multiplicative_increase_bps;}最后一个是最大均值和方差的更新,主要在衰减状态时候进行估计。
void AimdRateControl::UpdateMaxBitRateEstimate(float incoming_bitrate_kbps) { const float alpha = 0.05f; // 当前没有初始值,先设为当前码率,如果有的话,就用当前的值和均值做平滑。 if (avg_max_bitrate_kbps_ == -1.0f) { avg_max_bitrate_kbps_ = incoming_bitrate_kbps; } else { avg_max_bitrate_kbps_ = (1 - alpha) * avg_max_bitrate_kbps_ + alpha * incoming_bitrate_kbps; } // Estimate the max bit rate variance and normalize the variance // with the average max bit rate. const float norm = std::max(avg_max_bitrate_kbps_, 1.0f); // 方差的平滑 var_max_bitrate_kbps_ = (1 - alpha) * var_max_bitrate_kbps_ + alpha * (avg_max_bitrate_kbps_ - incoming_bitrate_kbps) * (avg_max_bitrate_kbps_ - incoming_bitrate_kbps) / norm; // 0.4 ~= 14 kbit/s at 500 kbit/s if (var_max_bitrate_kbps_ < 0.4f) { var_max_bitrate_kbps_ = 0.4f; } // 2.5f ~= 35 kbit/s at 500 kbit/s if (var_max_bitrate_kbps_ > 2.5f) { var_max_bitrate_kbps_ = 2.5f; }}阅读全文
1 0
- Webrtc delay-base-bwe代码分析(5): AimdRateControl模块
- Webrtc delay-base-bwe代码分析(1): RateStatistics模块
- Webrtc delay-base-bwe代码分析(2): InterArrival模块
- Webrtc delay-base-bwe代码分析(3): OveruseEstimator模块
- Webrtc delay-base-bwe代码分析(4): OveruseDetector模块
- Webrtc delay-base-bwe代码分析(6): 整体分析
- webRTC base模块Event事件的实现
- webRTC base模块SharedExclusiveLock读写锁实现
- WebRTC代码走读(十):rtp_rtcp模块分析
- WebRTC代码走读(十一):video_coding模块分析
- webRTC base模块CritScope临界锁的实现
- webRTC base模块MessageQueue消息队列的实现
- webRTC base模块SigSlot信号与槽实现
- WebRTC源码分析:音频模块结构分析
- WebRTC源码分析:音频模块结构分析
- Bandwidth Estimation in WebRTC (and the new Sender Side BWE)
- WebRTC源码分析二:音频模块结构
- WebRTC源码分析四:视频模块结构
- 【面试】String创建时在内存中的方式
- sudo -i 也可以登录到root吗?
- SSCNet环境搭建
- [Introduction to Algorithms 学习笔记] 单源最短路径
- 机器学习中的数学(慢慢补充)
- Webrtc delay-base-bwe代码分析(5): AimdRateControl模块
- sigmoid和softmax总结
- 为什么要配置环境变量
- 六 访问控制权限总结
- ROS-leaning-(2)-ActionLib
- EventLoop与EventLoopGroup
- hdoj1019 Least Common Multiple(一组数的最小公倍数)
- C#调用WebService实例和开发
- 数组指针和指针数组


