Webrtc delay-base-bwe代码分析(6): 整体分析
来源:互联网 发布:淘宝小叶紫檀真假 编辑:程序博客网 时间:2024/05/21 09:56
@(webrtc)[webrtc, congestion control]
Webrtc delay-base-bwe代码分析(6): 整体分析
当收到RTP数据包时,会触发RemoteBitrateEstimatorSingleStream::IncomingPacket函数进行处理。
这里面使用到了之前几篇文章分析的模块,各自进行各自的处理。
void RemoteBitrateEstimatorSingleStream::IncomingPacket( int64_t arrival_time_ms, size_t payload_size, const RTPHeader& header) { uint32_t ssrc = header.ssrc; uint32_t rtp_timestamp = header.timestamp + header.extension.transmissionTimeOffset; int64_t now_ms = clock_->TimeInMilliseconds(); CriticalSectionScoped cs(crit_sect_.get()); SsrcOveruseEstimatorMap::iterator it = overuse_detectors_.find(ssrc); // 根据SSRC查找对应的检测器 if (it == overuse_detectors_.end()) { // This is a new SSRC. Adding to map. // TODO(holmer): If the channel changes SSRC the old SSRC will still be // around in this map until the channel is deleted. This is OK since the // callback will no longer be called for the old SSRC. This will be // automatically cleaned up when we have one RemoteBitrateEstimator per REMB // group. std::pair<SsrcOveruseEstimatorMap::iterator, bool> insert_result = overuse_detectors_.insert(std::make_pair( ssrc, new Detector(now_ms, OverUseDetectorOptions(), true))); it = insert_result.first; } Detector* estimator = it->second; estimator->last_packet_time_ms = now_ms; // Check if incoming bitrate estimate is valid, and if it needs to be reset. // 会先以当前时间为基准,从历史的传输数据中尝试获取未更新当前时间的旧码率值。 rtc::Optional<uint32_t> incoming_bitrate = incoming_bitrate_.Rate(now_ms); if (incoming_bitrate) { last_valid_incoming_bitrate_ = *incoming_bitrate; } else if (last_valid_incoming_bitrate_ > 0) { // Incoming bitrate had a previous valid value, but now not enough data // point are left within the current window. Reset incoming bitrate // estimator so that the window size will only contain new data points. incoming_bitrate_.Reset(); last_valid_incoming_bitrate_ = 0; } // 在历史传输数据中更新当前数据。 incoming_bitrate_.Update(payload_size, now_ms); const BandwidthUsage prior_state = estimator->detector.State(); uint32_t timestamp_delta = 0; int64_t time_delta = 0; int size_delta = 0; // 到达时间统计已经有足够样本构成一个新的group时, if (estimator->inter_arrival.ComputeDeltas( rtp_timestamp, arrival_time_ms, now_ms, payload_size, ×tamp_delta, &time_delta, &size_delta)) { double timestamp_delta_ms = timestamp_delta * kTimestampToMs; // 根据到达时间间隔,更新卡尔曼滤波器 estimator->estimator.Update(time_delta, timestamp_delta_ms, size_delta, estimator->detector.State()); // 根据卡尔曼滤波器校准后的值,更新当前链路使用状态。 estimator->detector.Detect(estimator->estimator.offset(), timestamp_delta_ms, estimator->estimator.num_of_deltas(), now_ms); } // 当处于连续过载状态时候需要立刻对码率进行更新, // 如果是其他状态,会由定时器在Process函数中更新对应状态。 // UpdateEstimate会对状态机AimdRateControl进行处理。 if (estimator->detector.State() == kBwOverusing) { rtc::Optional<uint32_t> incoming_bitrate_bps = incoming_bitrate_.Rate(now_ms); if (incoming_bitrate_bps && (prior_state != kBwOverusing || remote_rate_->TimeToReduceFurther(now_ms, *incoming_bitrate_bps))) { // The first overuse should immediately trigger a new estimate. // We also have to update the estimate immediately if we are overusing // and the target bitrate is too high compared to what we are receiving. UpdateEstimate(now_ms); } }}简单流程图: 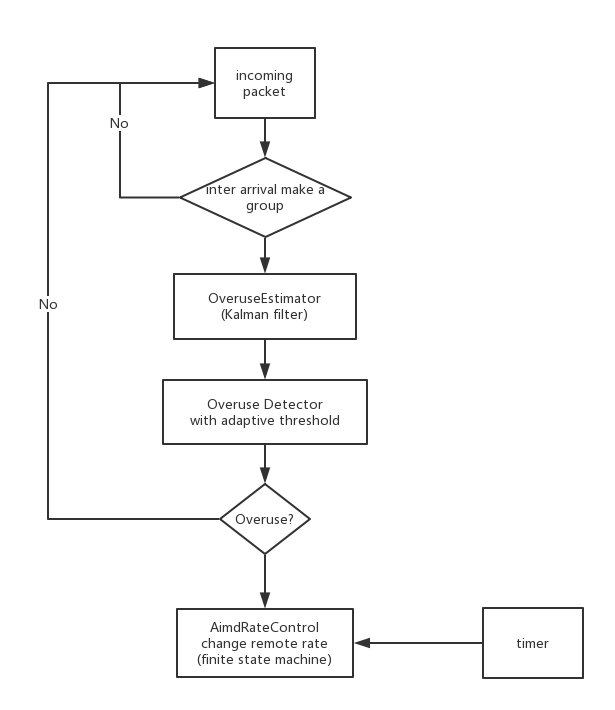
阅读全文
1 0
- Webrtc delay-base-bwe代码分析(6): 整体分析
- Webrtc delay-base-bwe代码分析(1): RateStatistics模块
- Webrtc delay-base-bwe代码分析(2): InterArrival模块
- Webrtc delay-base-bwe代码分析(3): OveruseEstimator模块
- Webrtc delay-base-bwe代码分析(4): OveruseDetector模块
- Webrtc delay-base-bwe代码分析(5): AimdRateControl模块
- WebRTC音视频引擎研究(1)--整体架构分析
- WebRTC音视频引擎研究(1)--整体架构分析 .
- WebRTC音视频引擎研究(1)--整体架构分析
- WebRTC音视频引擎研究(1)--整体架构分析
- WebRTC音视频引擎研究(1)--整体架构分析 .
- WebRTC音视频引擎研究(1)--整体架构分析
- WebRTC音视频引擎研究(1)--整体架构分析
- WebRTC音视频引擎研究(1)--整体架构分析
- WebRTC音视频引擎研究(1)--整体架构分析
- WebRTC音视频引擎研究(1)--整体架构分析
- WebRTC音视频引擎研究(1)--整体架构分析
- WebRTC音视频引擎研究(1)--整体架构分析
- 数组指针和指针数组
- centos 6.8 + make + pgql9.6
- Python学习手册(第三部分)
- 二叉树的各个考点
- viewpager跟HorizontalScrollView,listview冲突的问题
- Webrtc delay-base-bwe代码分析(6): 整体分析
- html块状元素、内联元素
- solr安装与配置
- [深度学习] DNN中防止过拟合的方法
- 队列(链式)
- Vue2.3.0源码笔记(未完)
- Opencv图像的读取
- pom.xml中maven-compiler-plugin报错
- 继承