【计算机视觉】全景相机标定(MATLAB/opencv)
来源:互联网 发布:excel相关系数矩阵 编辑:程序博客网 时间:2024/05/17 21:48
全景相机标定
1Matlab工具箱
新的标定工具箱: 不需要先验知识的相机或镜像参数和我们只保持的灵活性 必须为每个校准网格选择4分(我们不 需要单独选择每个角落)。
包含投影模型的函数(和雅克比)是可用的 在Matlab分别作为一个c++类相关的墨西哥人的功能。 类初始化在校准过程中生成的文件。 它使3 d点的投影也像点的提升 投影射线。
这个新的“ 全景 标定工具箱 ”是一个完整的重写之前的版本。 它使用一些功能从“ 加州理工学院 标定工具箱“让Bouguet。
这个页面给出的一个例子 校准会话。 这些图片 是 用于尝试工具箱。 你可以找到一个校准网格/模式 在这里。投影模型 使用的是可用的 在这里。
工具箱已成功用于校准双曲线,抛物线, 折叠镜、球形和广角传感器。
重要:校准参数与Matlab计算 坐标(从1开始),而不是与C / c++公约 (从0开始)。
我要感谢的 ACFR (澳大利亚领域机器人中心)提供一些 夸张的图片,特别是 亚历克斯·布鲁克斯 。
- 投影模型和参数
- 校准会话
- 不同的按钮和设置
- 下载
- 常见问题解答
投影模型和参数
使用的投影模型 在这里 。 它是一个统一的投影模型的组合来自盖尔和Barreto 和径向畸变函数。 这个模型可以考虑 远心镜头引入的失真(抛物面镜)和给予 一个更大的灵活性(球形镜子可以校准)。
校准估计:
- 外在参数对应的旋转 (四元数:Qw)和翻译(Tw)之间的网格和镜子
- 参数描述镜子形状(xi)
- 镜头(如引起的失真。 远心的) (kc)
- 的固有参数普遍相机:斜(alpha_c), 普遍焦距(γγ₂)和主点(cc)
校准会话
- 启动
- 镜子类型
- 加载图片
- 估计的内在参数 镜子的边界
- 提取网格角落
- 校准
- 分析错误
启动
请编辑 SETTINGS.m 第一次的文件。开始在Matlab工具箱:
> > omni_calib_gui
这个窗口将会出现:

包含图片的目录。
如果你想知道直接的使用不同 按钮,去 本节 。
1 or [] : parabola (xi=1)
2 : catadioptric (hyperbola,ellipse,sphere)
3 : dioptric (fisheye)
Choice :
Camera type : parabolic.。
加载图片
"" 会问你在当前图像的基本名称吗 目录和格式:
>>
. Omni_Fixed_Values.m cameraAvecOmni_00.tif cameraAvecOmni_02.tif cameraAvecOmni_04.tif cameraAvecOmni_06.tif
.. Omni_Fixed_Values.mat cameraAvecOmni_01.tif cameraAvecOmni_03.tif cameraAvecOmni_05.tif
Basename camera calibration images (without number nor suffix): cameraAvecOmni_
Image format: ([]='r'='ras', 'b'='bmp', 't'='tif', 'p'='pgm', 'j'='jpg', 'm'='ppm') t
Loading image 1...2...3...4...5...6...7...
done
完成
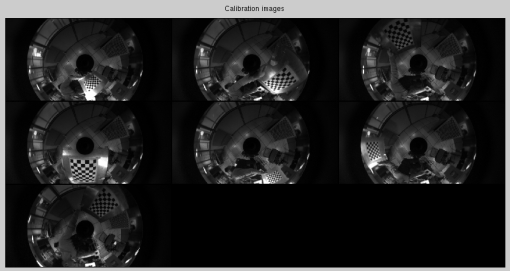
图片正在加载,我们已经准备好开始估算 内在价值然后校准传感器。
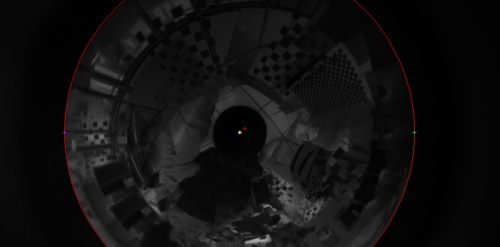
的内在参数 镜子的边界
按下 "", 我们将计算的固有参数的估计 潜在的相机(普通焦距和中心)。
在反射折射的传感器的情况下,要求用户点击的中心 镜子:
Please click on the mirror center and then on the mirror inner border.
Calculating edges... done.
Rejecting inner points... done.
Doing a simplified RANSAC to obtain circle parameters... done.
Was the extraction successful ? ([]=yes, other=no) :
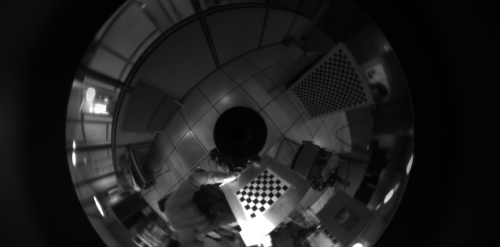
然后我们估计普遍焦距从点线图片:
We are now going to estimate the generalised focal (gammac) from line images.
Which image shall we use ? ([] = 1) : 2
Please select at least 4 ALIGNED edge points on a NON-RADIAL line on the grid.
Click with the right button when finished.
done.

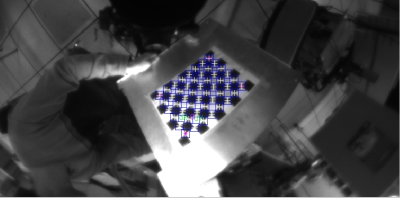
提取网格角落
我们现在准备提取的网格角落 将使用在最小化,新闻 ” ”:"":
Extraction of the grid corners on the images
Number(s) of image(s) to process ([] = all images) =
Window size for corner finder (wintx and winty):
wintx ([] = 8) = Sub-pixel extraction in the catadioptric case is less tolerant and we should try and keep the window size down.
winty ([] = 8) =
Window size = 17x17
Processing image 1...
Using (wintx,winty)=(8,8) - Window size = 17x17 (Note: To reset the window size, run script clearwin)
Please press enter after zooming...
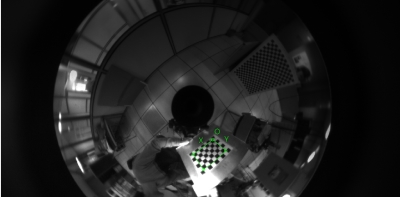
现在您可以放大校准网格并按[ENTER]键:
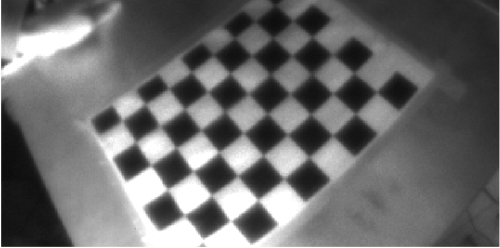
你现在需要点击网格的四角顺时针 顺序:
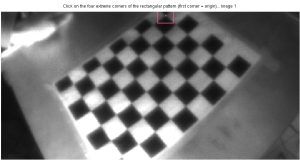
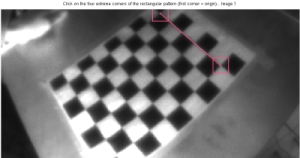
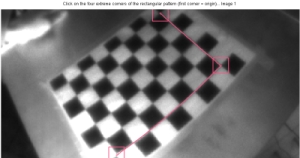
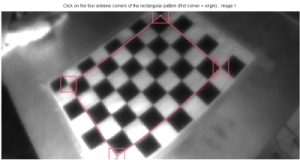
omni-lines应该按照网格。
你将被要求网格的大小:
Size of each square along the X direction: dX=42mm
Size of each square along the Y direction: dY=42mm (Note: To reset the size of the squares, clear the variables dX and dY)
Corner extraction...
校准
按“ ” 将开始最小化:
>>
Aspect ratio optimized (est_aspect_ratio = 1) -> both components of fc are estimated (DEFAULT).
Principal point optimized (center_optim=1) - (DEFAULT). To reject principal point, set center_optim=0
Skew not optimized (est_alpha=0) - (DEFAULT)
Main calibration optimization procedure - Number of images : 7
Gradient descent iterations : WARNING: removing singular matrix warning and managing it internally.
1...2...(r) 3...4...5...6...7...8...9...10...11...12...(r) 13...14...15...16...17...18...19...20...21...22...(r) 23...24...25...26...27...28...29...30...31...32...(r) 33...34...35...36...37...38...39...40...41..
42...(r) 43...44...45...46...47...48...49...50...51...52...(r) 53...54...55...56...57...58...59...Matrix badly conditioned, stopping...
done
Estimation of uncertainties...done
Calibration results after optimization (with uncertainties):
Focal Length: fc = [17.92581 17.91205 ] ± [ 0.18220 0.21302 ]
Principal point: cc = [ 980.75605 544.84446 ] ± [ 4.41434 4.64072 ]
Skew: alpha_c = [ 0.00000 ] ± [ 0.00283 ] => angle of pixel axes = 90.00000 ± 0.16228 degrees
Distortion: kc = [ -0.00008 0.00000 0.00000 -0.00000 0.00000 ] ± [ 0.00001 0.00000 0.00003 0.00002 0.00000 ]
Pixel error+-std : err = [ 0.17324 0.29971 ]+-[ 0.13750 0.24850 ]
Note: The numerical errors are approximately three times the standard deviations (for reference).
Recommendation: The skew coefficient alpha_c is found to be equal to zero (within its uncertainty).
You may want to reject it from the optimization by setting est_alpha=0 and run Calibration
Recommendation: Some distortion coefficients are found equal to zero (within their uncertainties).
To reject them from the optimization set est_dist=[1;1;0;0;0] and run Calibration
(r)表明,外在的独立参数被重新评估。
“像素错误”的平均绝对误差。
外在的迭代次数和频率参数 计算可以改变在“ SETTINGS.m ”文件。
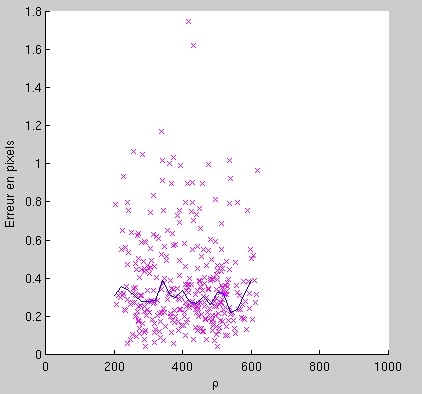
分析错误
三个工具可以用来分析错误:- "" 给了你错误的图像和距离 点的图像中心:
- ""“这将给你 reprojection错误,每一种颜色 关联到一个图像。 这将帮助你识别的点 被错误地提取。
然后,您可以使用reextract角落 ” ”。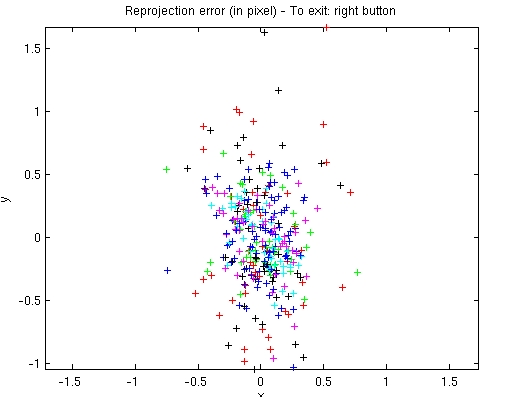
- ” “3 d显示了网格:
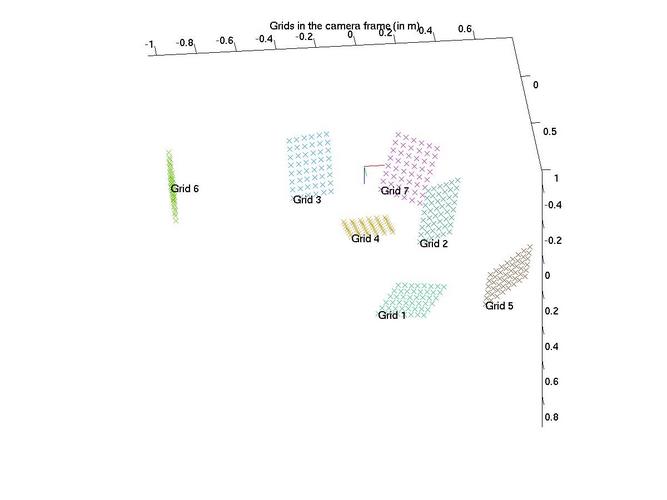
当心 :当 校准,它是不够的绝对误差。 的 平均超过所有的错误没有考虑空间 分布的错误。 校准可能取决于 网格的位置(偏见)。
不同的按钮和设置
“ SETTINGS.m “文件包含工具箱的路径 和变量最小化(max。 之前的迭代和步骤 验算外在参数)。按钮:
- ""” “镜子的直径和输入值 参数
- ""” “加载图像用于校准
- ""” ” 获得初始值的校准使用镜子边境
- ""” “帮助提取电网校准的角落
- ""” ” 根据项目黄色网格点 红色的计算值,提取的点
- ""” ” 使用图像中的距离发射最小化
- ""” ” 消除了校准参数
- ""” “reprojects错误,这可以用来找到图片 没有正确提取的分
- ""” ” 验算点提取reprojecting后 网格点(这可以使用当“分析错误”表明,网格点 不正确地提取)
- ""” ” 画了一个相机和网格的三维视图
- ""” ”像素误差与阴谋 点的距离图像的中心
- ""” ”可以添加或删除图片
- ""” “显示校准值和错误
- ""” ” 节省了外在和内在参数,网格点,…
- ""” 加” 加载校准期间获取的值
- ""” ” 退出程序
下载
文件不属于“ 加州理工学院 标定工具箱 “让Bouguet 发表下 GPL许可证 版本2 。
如果你有任何建议,bug修正请写: Christopher.Mei@sophia.inria.fr
改进的全景校准 工具箱 (别忘了改变 SETTINGS.m 的文件)( ZIP] ( BZ2 ]投影函数(matlab c++,墨西哥人文件)( ZIP][ BZ2 ]图像检测的校准工具( ZIP][ BZ2 ]投影模型( PDF ]校准网格/模式( PDF ]
旧的工具箱
旧的工具箱,不再维护。
版本0.93 Matlab全景校准 工具箱 (别忘了改变 SETTINGS.m 的文件) ( ZIP] ( BZ2 ] 图像检测的校准工具( ZIP][ BZ2 ] 版本1.1C 程序 undistort图片 ( ZIP ][ BZ2 ] 版本1.0C示例程序阅读 无畸变的校正模型
( ZIP ] ( BZ2 ]
常见问题解答
当我所说的“ ”, 我得到一个错误 “标识符” 预期,”(“发现。 ”!回答 : 自0.92版(兼容matlab 6),这一点 不应该发生了
2 openccv 标定
原文来源 opencv http://docs.opencv.org/master/dd/d12/tutorial_omnidir_calib_main.html
这个模块包括校准、整流和全景相机立体重建。 本文中描述的相机模型:
c·梅和p,单一的观点全景相机校正平面网格,2007年举行的“国际机器人与自动化会议”。-------------
C. Mei and P. Rives, Single view point omnidirectional camera calibration from planar(平面的) grids, in ICRA 2007.
模型能够模拟反射折射的相机和鱼眼相机,可能都有非常大的视野。
校准的实现是基于李的标定工具箱( Li's calibration toolbox):
b·李·l·亨,k . Kevin和m . Pollefeys“Multiple-Camera系统标定工具箱使用功能Descriptor-Based校准模式”,——2013年。
B. Li, L. Heng, K. Kevin and M. Pollefeys, "A Multiple-Camera System Calibration Toolbox Using A Feature Descriptor-Based Calibration Pattern", in IROS 2013.
本教程将介绍以下的部分全景相机calibartion模块:
- 校准一个相机。
- 校准一双立体相机。
- 纠正图像,以便大型畸变消除。
- 重建三维从两个立体图像,大视场。。
- 和opencv / calib3d鱼眼模型相比
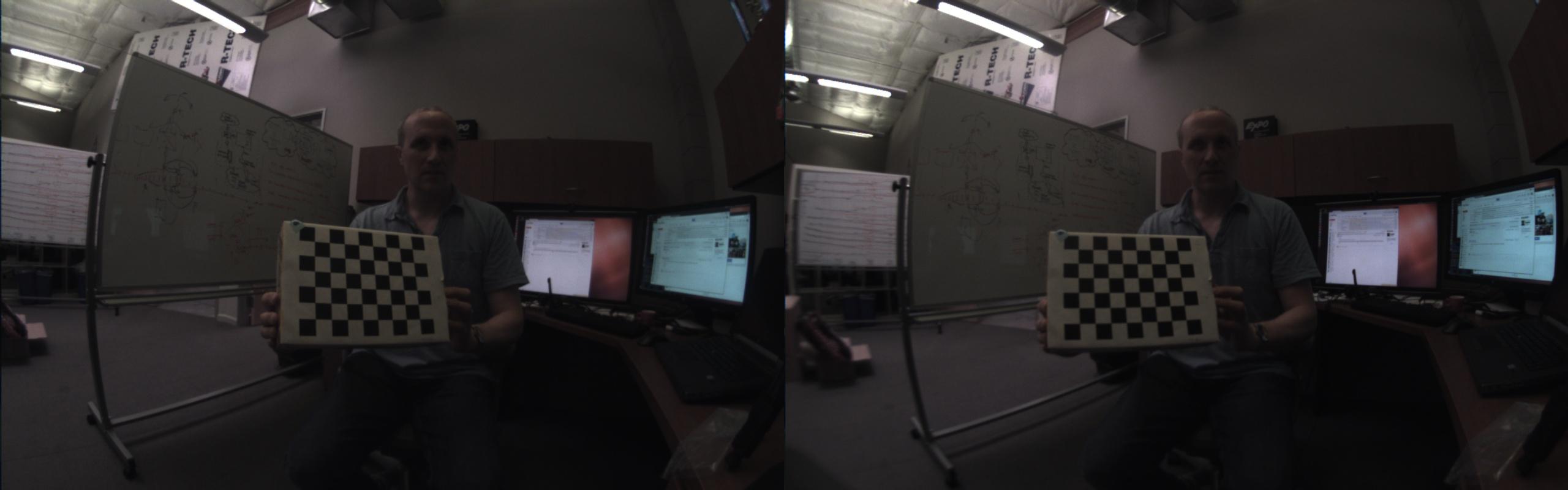
单摄像机标定
校准相机的第一步是校准模式和拍照。 几种模式支持OpenCV,checkerborad和圆网格。 也可以使用一个名为随机模式的新模式,您可以参考opencv_contrib /模块/ ccalib为更多的细节。
下一步是提取角校准模式。 棋盘使用OpenCV函数 CV:findChessboardCorners对于圆网格,使用 CV:findCirclesGrid为随机模式,使用 randomPatternCornerFinder类opencv_contrib /模块/ ccalib / src / randomPattern.hpp。 角落的位置在图像保存在一个变量 imagePoints。 的类型 imagePoints可能是 std::矢量< std::<CV:Vec2f> >在每一帧,第一个向量商店的角落,第二个向量角落存储在单个框架。 类型也可以 std::向量<CV: Mat>在哪里 CV:Mat是 CV_32FC2。
同时,相应的3 d世界(模式)坐标点是必需的。 你可以计算他们为自己如果你知道你的物理尺寸的模式。 节省3 d点 objectPoints,类似于 imagePoints,它可以 std::矢量< std::< Vec3f > >或 std::向量<CV:Mat>在哪里 CV:Mat的类型是 CV_32FC3。 注的大小 objectPoints和 imagePoints必须是相同的,因为他们是相互对应的。
立体校准
立体标定校准两个摄像头在一起。 两个摄像头的输出参数包括相机参数和相对姿态。 恢复相对姿势,两个摄像头必须遵守相同的模式同时,所以 objectPoints的两个摄像头都是相同的。
图像Rectificaiton
全景图像有很大的变形,所以人类的眼睛球不兼容。 为了更好的视图中,整流可以应用如果相机参数是已知的。 这里有一个例子360度全方位图像的水平视野。

的变量 扭曲的 和 不失真 是原图像和纠正图像依透视画法。 K , D , 习 是相机参数。 知道 和 new_size 是纠正图像的摄像机矩阵和图像大小。 旗帜 是整流类型,它可以是:
- RECTIFY_PERSPECTIVE:纠正透视图像,这将失去一些提出的观点。
- RECTIFY_CYLINDRICAL:纠正柱面图像保存所有视图。
- RECTIFY_STEREOGRAPHIC:纠正立体图像可能会失去一些观点。
- RECTIFY_LONGLATI:纠正longitude-latitude地图像地球的世界地图。 整流可用于立体重建但可能不是友好的观点。 这张地图是论文中描述: 李双目球面立体[J]。 智能交通系统、IEEE 2008、9(4):589 - 600。
以下四个图像矫正图像了以上四种类型:




它可以观察到的角度纠正图像perserves一点点的视野,不好看。 圆柱形整流保存所有字段的视图和场景是不自然的只有中间的底部。 球面的底部的失真小于圆柱,但其他地方更大的扭曲,它不能保留所有的视野。 图像非常大的失真,longitude-latitude整改并没有给出一个好的结果,但它可以使纵向约束在一条线,这样可以应用在全景图像立体匹配。
请注意 :有一个更好的结果,你应该仔细选择 知道它与你的相机。 一般来说,一个更小的焦距会导致一个更小的视野,反之亦然。 这里有recommonded设置。
对于RECTIFY_PERSPECTIVE
RECTIFY_CYLINDRICAL、RECTIFY_STEREOGRAPHIC RECTIFY_LONGLATI
也许你需要改变 (v0情况)得到一个更好的观点。
立体重建
立体重建重建3 d分一对校准立体相机。 这是一个计算机幻影的基本问题。 然而,对于全景相机,它不是非常受欢迎的,因为大变形使它有点困难。 传统方法纠正图像视角的立体透视图像重建。 然而,最后一节表明recifying视角图像失去太多的视野,浪费全景相机的优势,即大的视野。
立。
此外, imageRec1和 imagerec2是修正版的第一和第二图像。 纵向线的坐标相同,这样立体匹配变得容易。 这里有一个例子:
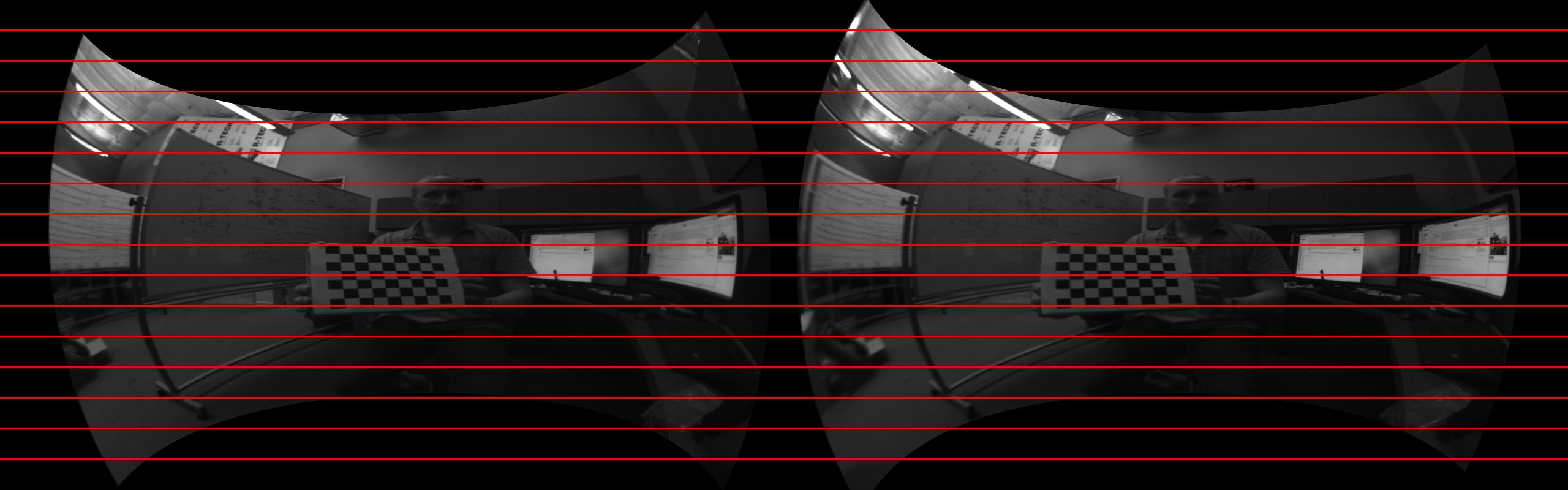
它可以观察到他们是一致的。 的变量 disMap差异映射计算吗 简历:StereoSGBM从 imageRec1和 imageRec2。 的差距地图上面的两张图片是:
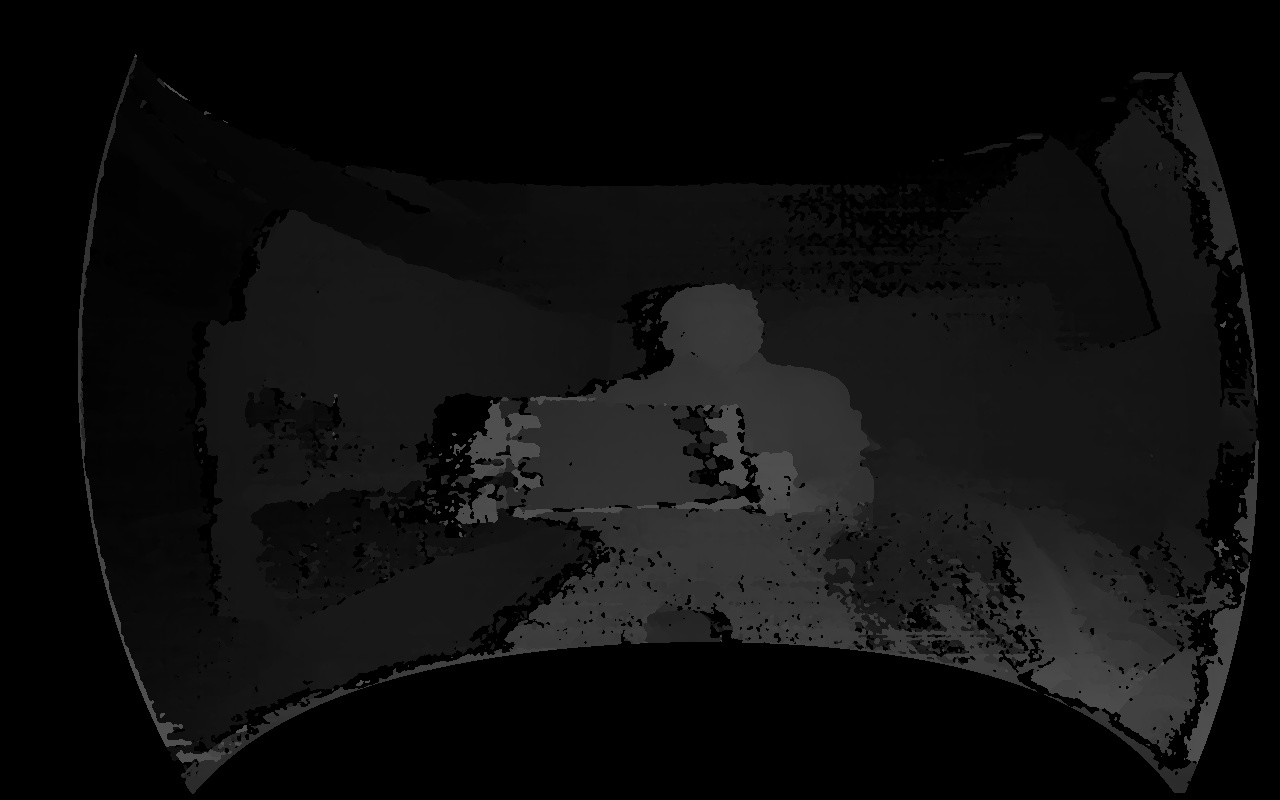
之后我们有差距,我们可以计算3 d为每个像素位置。 点云存储 pointCloud,这是一个三路或6通道 简历:垫。 我们展示如下图的点云。

- 【计算机视觉】全景相机标定(MATLAB/opencv)
- 【计算机视觉】 多幅相机标定, 多相机标定(matlab/opencv)
- 【计算机视觉】全景相机
- 计算机视觉-相机参数标定
- 相机标定之OpenCV&Matlab
- 相机标定之OpenCV&Matlab
- 相机标定之OpenCV&Matlab
- 相机标定入门教程【 OpenCV + Matlab】
- 相机标定之OpenCV&Matlab
- 【视频开发】【计算机视觉】相机标定(Camera calibration)《二》
- 计算机视觉基础之相机标定
- 计算机视觉——相机标定
- 【计算机视觉】 双目相机标定以及立体测距原理及OpenCV实现
- matlab与opencv双目相机标定对比
- 相机标定 matlab opencv ROS三种方法标定步骤(1)
- 相机标定 matlab opencv ROS三种方法标定步骤(3)
- 相机标定 matlab opencv ROS三种方法标定步骤(2)
- 【计算机视觉】摄像机标定 matlab toolbox_calib工具箱(单目标定和双目标定)
- TensorFlow入门(二)——基本用法
- Hibernate中表与表之间关系的处理(一对多)
- C++ string append方法的常用用法
- 设计模式-单例模式的Java代码体现Runtime类
- 初学Vue-cli
- 【计算机视觉】全景相机标定(MATLAB/opencv)
- 关于凸优化的一些简单概念
- 2017上海金马五校程序设计竞赛 O:An Easy Problem
- 面试题29数组中出现次数超过一半的数字
- 使用jUnit4测试Spring4
- 【HDU 1427 计算24点 DFS】
- 两数之和
- 数据结构与算法之线性表(一)(笔记)
- 了解CSS属性font-kerning,font-smoothing,font-variant


