PUMA560机器人仿真系统
来源:互联网 发布:angularjs数据格式化 编辑:程序博客网 时间:2024/05/14 12:15
这是我在上《机器人原理与应用》课程的时候所作的课程设计,其中用到了Robotics Toolbox for MATLAB,当然在运行下面的界面的时候也是需要安装这个工具箱的。如果没有这个工具箱可以在后面的网址下载这个工具箱和源程序。
下面是运行初始时的状态:
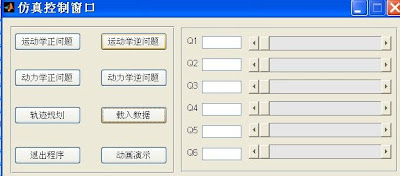
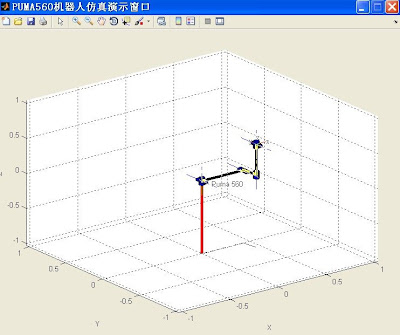
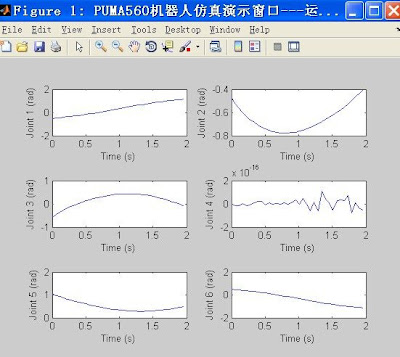
从上面也能看出,这个仿真系统能仿真运动学的正问题和逆问题,以及动力学的正逆问题和轨迹规划。Q1-Q6为PUMA560的六个自由度的值,都是角度。
可以从这里下载源程序和Robotics Toolbox for MATLAB:http://groups.google.com/group/tim-files/files?upload=1 名称为:puma560.rar(源程序) robot.rar(机器人工具箱)
下面是更多的相关图片:
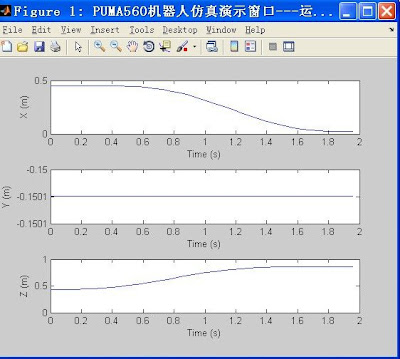
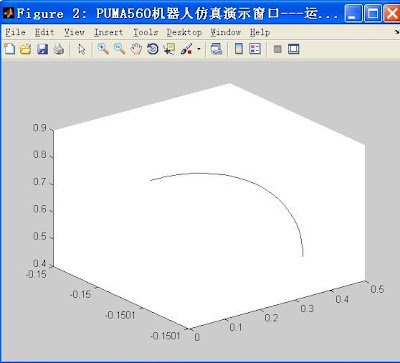
运动学正问题:
运动学逆问题:
其他的就不再一一列举,有兴趣下载程序运行下。
注意:最好在MATLAB2008a上运行,最低要在MATLAB7.0上运行
- PUMA560机器人仿真系统
- puma560 机器人构建MATLAB
- Puma560 机器人DH变换
- 多机器人系统仿真平台(摘要与目录)
- EyeSim——嵌入式移动机器人仿真系统
- 机器人系统常用仿真软件介绍和效果
- 当机器人系统与三维可视化仿真遇到虚拟现实技术
- 机器人系统常用仿真软件介绍和效果
- 机器人系统常用仿真软件介绍效果与评价指标
- Matlab Robotic Toolbox V9.10工具箱(六):puma560 动力学建模与仿真
- 机器人足球(仿真)
- 3D仿真机器人
- 机器人常用仿真软件
- webots仿真机器人平台
- webots仿真机器人平台
- Webots机器人仿真软件
- 机器人开发仿真软件
- 机器人系统常用仿真软件工具介绍、效果与评价指标
- 位图的直方图均衡化和直方图的绘制
- 技术解析:什么是模式? 什么是框架?
- (转)解决 amule 启动后,kad状态一直为“firewalled”的状态,以及怎样增加kad连接数
- 如何通过在 Visual C++ 中单元封送接口
- 2008.12.29
- PUMA560机器人仿真系统
- 2008.12.31
- 图像边缘检测界面
- 剖析ASP.NET AJAX的面向对象思想
- 2009.01.01
- 全套人民币(纸币)图片欣赏------你认识多少张?
- 利用Java技术进行XML编程(续)
- 2009.01.02
- ASP.net 中关于控件Treeview的操作------ 节点查找、删除和添加


