影像技术—行车记录仪客观评价指标
来源:互联网 发布:义隆单片机em 编辑:程序博客网 时间:2024/05/01 05:22
链接:https://www.zhihu.com/question/22499326/answer/100824096
在知乎上看到有关成像质量客观测试技术的文章,觉得讲的很精彩,作者以行车记录仪案例做分析,开展了各种影像技术客观评价标准。
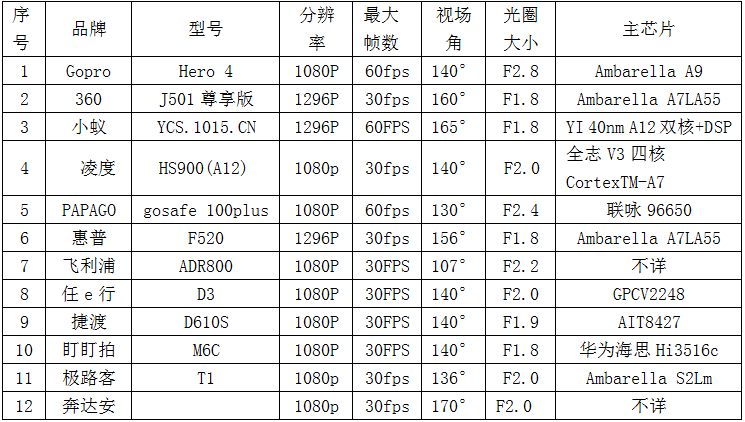
现有的行车记录仪均标称是高清行车记录仪,标示了720P,1080P,1296P,这些参数代表了什么呢?大家且看下表:
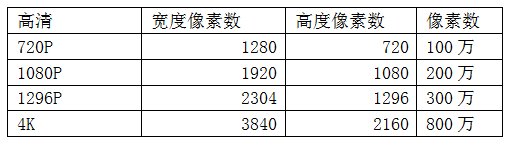
大家看到这个表格的数据可能觉得奇怪,在如今千万像素级相机、手机满天飞的年代,行车记录仪普遍不超过300万像素,能够拍清车牌吗?
其实是可以的——只要你贴得够近。
当然,这只是一个玩笑。所以,行车记录仪的像素还是大一点比较好。
除了像素,行车记录仪商家还常常标出一个参数:超广角。
这个广角和成像效果之间到底有没有关系呢?我们特意做了一个实验。
下图为车牌标准字体和大小:
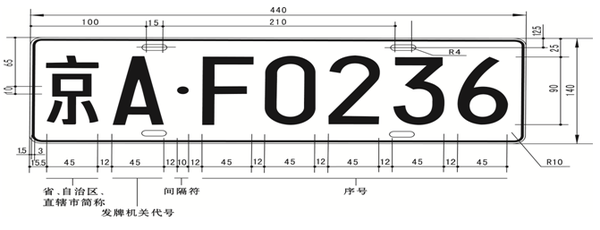
车牌主要是由字母和数字构成,下面我们取6个高像素数字、字母,作为可分辨车牌的极限参考尺寸,根据国家标准规定的车牌大小计算,分别来看下720P,1080P和1296P的行车记录仪到底在多远距离可以拍清楚车牌:
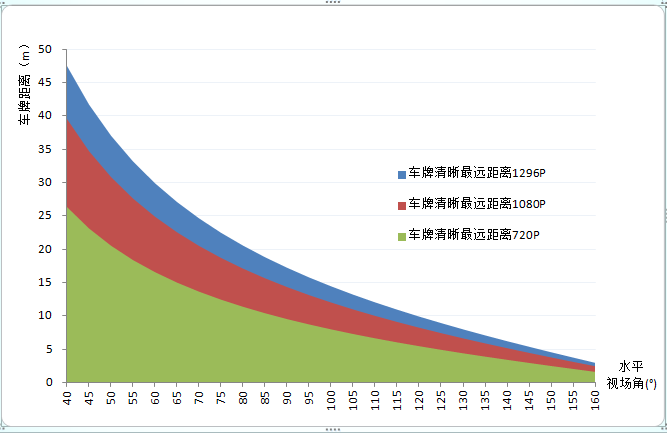
通过上图,我们可以看出视场角越大,拍摄到的范围越广,而要拍清楚车牌,则需要离车牌的距离更近。
举个例子,水平视场角120度的行车记录仪,720P最远可拍清楚5.5米距离的车牌,大概一个车身的距离。而1080P则可拍清楚8.3米的车牌,大概1个半车身的距离。而1296P则可拍清楚10米远外的车牌,约为2个车身的距离。
那么如何选择视场角呢?是不是视角越大越好呢?我看未必。只有最适合的才是最好的,过分追求更大的视角只是浪费。毕竟鱼和熊掌不可兼得,超广角和拍照效果确实是成反比的,同样像素级别的行车记录仪,视场角越大成像质量就会越差。
根据以往交通事故的统计,前撞和侧撞占了所有事故的7成以上。如果去停车场转一圈,大家可以看到车头左右两侧有擦痕的车辆不在少数。

笔者认为视场角以接近120度为佳,可覆盖整个车头,而且3米远外即可覆盖三车道,一旦发生事故,相邻车道的车况可一览无余。

影响成像质量的其他因素:
除了上述的像素和视广角,还有一些因素也会影响到成像质量。我们实验室挑取了京东,淘宝销量考前的10款行车记录仪,分别测试了一下项目:

==============================================================
6月8日更新
由于这个测试项目实在是太多了,我怕大多数人没有耐心看完这个测评报告,我就先把结果贴出来吧。有兴趣了解这个得分如何出来的,可以一个个测试项目地看。
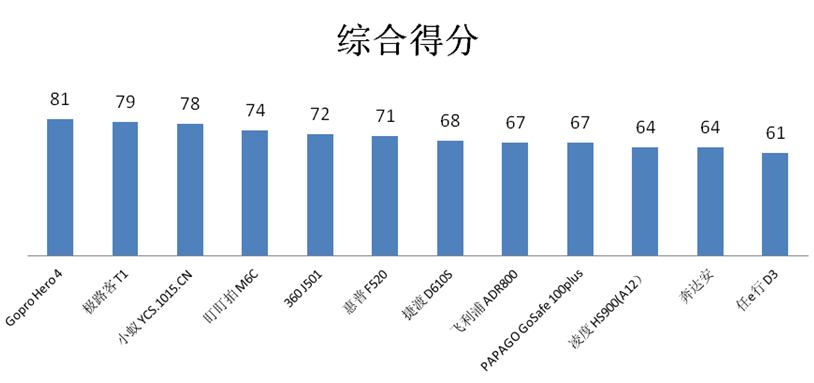 这个得分是综合各个测试项目得出来的分数,仅供参考~这个得分是综合各个测试项目得出来的分数,仅供参考~
这个得分是综合各个测试项目得出来的分数,仅供参考~这个得分是综合各个测试项目得出来的分数,仅供参考~
==============================================================
以下是漫长的测试过程!~~
我们选择了电商平台京东、淘宝中销量靠前的12款行车记录,通过各种实验,深度测试其拍摄的图像质量。在这里,考量到部分土豪会拿Gopro当行车记录仪来用,同时也因为其响亮的名气和良好的性能,也常常被部分厂家拿来做对比,所以,我们这次也把Gopro加入了对比测试名单,看看Gopro是不是真的如传说当中那么神奇。
(上述信息来源于京东,淘宝宣传资料)
1、 曝光
1.1 曝光范围:测试行车记录仪在不同亮度环境下的表现,极路客T1表现最好
我们使用日本京立LB-8110与LLB-1300,模拟从LV0(照度0.4Lux,模拟夜晚环境)~LV20(45万Lux,模拟夏天晴天中午)的亮度环境,确认行车记录仪在这些环境中是否可以正确曝光。请看下图:
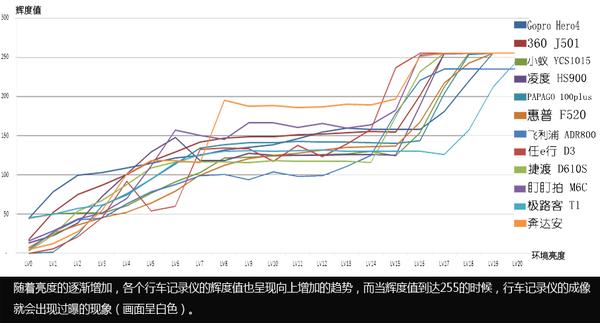
由上图可以看出,各家的行车记录仪在各个灯照强度下测试的辉度值都是不一样的,任e行 D3、奔安达、盯盯拍 M6C在光照强度LV16——LV17之间的时候,就已经出现了过曝的现象。表现最好的是极路客T1,在LV20的时候都没有出现过曝的现象。但是这里不得不提一下飞利浦ADR800,其最高辉度值只到235(理论上应为255),不知道是黑科技还是无厘头,永远不会过曝,但也无法分辨亮部细节,硬生生的砍掉了一部分亮部细节。
1.2场景切换响应时间
据统计,有为数不少的车祸发生在高速路隧道进出口,主要是因为人眼在环境明暗突然变化时,需要一定的时间去适应环境,而在适应环境的过程中会有短暂的视觉失效或视力下降。那么行车记录能否快速响应明暗场景切换,忠实记录行车路况呢?
我们使用日本京立LB-8110辉度箱 LV2档模拟隧道内昏暗环境,LV10档模拟隧道外的明亮环境,两档切换时间为0.2秒,测试行车记录仪的场景切换时的响应时间:
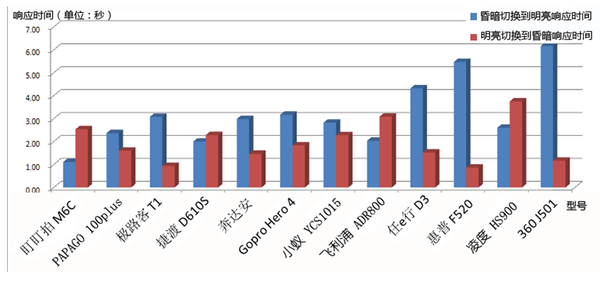
由上图可以看到,各个型号的行车记录仪从昏暗切换到明亮环境的响应时间和从明亮切换到昏暗环境的时间都不尽相同。以从昏暗切换到明亮环境为例,360行车记录仪需要6秒才能响应过来,而盯盯拍只需要1秒。
2、颜色: PAPAGO在低色温环境下会出现明显变色
对于行车记录仪的用户来说,可能并不太关注颜色,但实际上,一旦发生事故逃逸,在没有排清车牌的情况下,交警可根据肇事逃逸车辆的车型和车身颜色快速锁定嫌疑车辆,行车记录仪能否忠实地还原色彩就显的非常重要了。
我们通过测试颜色的均匀性和颜色还原度,给各个行车记录仪的色彩性能打分,结果如下。
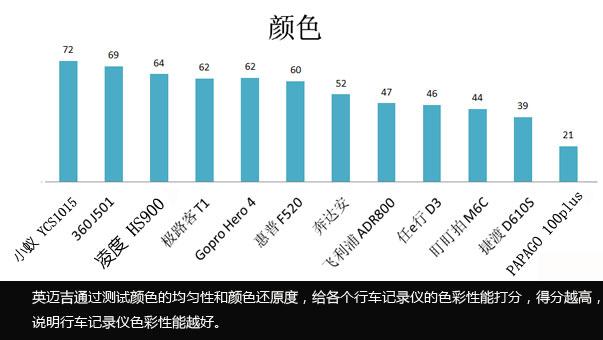
让人意外的是,行车记录仪的老牌劲旅PAPAGO颜色较为异常,其在低色温下明显偏红黄,请看以下视频截图:
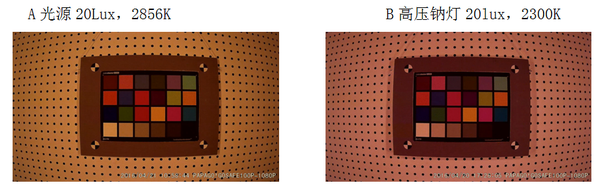
在这种情况下,深蓝色的车会被直接拍成黑车,势必会引起一些误导。
3、帧率和快门时间:凌度HS900、飞利浦、任e行 D3、捷渡D610S、奔达安都出现了虚标帧率的现象,实测帧率与其标称的帧率不完全符合
帧率(Frame Rate)表征的是视频1秒钟内记录的连续画面的张数,帧率越高,画面会更流畅,同时也说明主芯片的处理能力越强,全高清Full HD一般会要求帧率达到30帧。那么行车记录仪的帧率是否和厂商标示的一样高呢?是否有丢帧、算法插帧的情况出现呢?

由上图可以看出,大部分行车记录仪实测的帧率和标称的帧率还是大致吻合的,但是也有个别行车记录仪测试出来的帧率和标称的帧率有一定的差距。可以看到在弱光环境下,为获得更好的曝光,部分厂商做了降帧处理。
为什么降帧就能获得好的曝光呢?这里就要提到另外一个重要参数:快门时间,即真正在采样的曝光时间。
帧率同为30帧/秒,每帧时长1/30秒,但其快门时间却各有千秋。明亮环境中快门时间甚至可短至1/4000秒,在弱光环境下快门时间则会大大增加。当快门时间超过1/30秒,只有降低帧率才能获得好的曝光。所以我们会发现,同样帧率都是30帧/秒,画面同样流畅,但白天在80km/小时的速度都能拍清楚车牌,到了晚上20Km/小时却拍不清楚车牌。
为了让大家更好理解快门时间对成像的影响,我们在光线充足的环境下,帧率同为30帧/秒,但快门时间分别设定为1/100秒、1/500秒、1/1000秒、1/4000秒,拍摄以相同速度运动的小风扇。
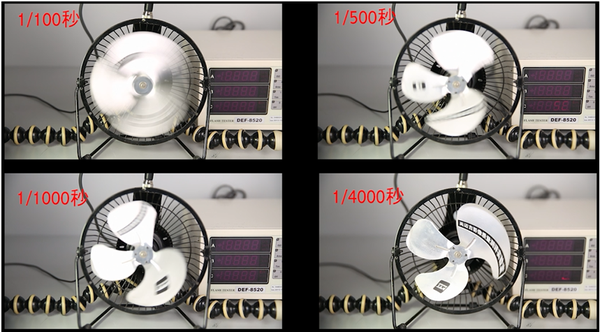
由上图我们可以看到,当快门时间为1/100秒的时候,风扇叶片全部糊成一片,完全看不清楚风扇扇叶和上面的文字,而当快门时间越来越小直至1/4000秒的时候,我们就可以逐渐看清楚扇叶的轮廓和上面的文字了。快门时间越短,视频中运动物体的拖影就越小。以下是我们实验视频的链接,有兴趣的朋友可以复制链接到地址栏,打开就能看到。快门时间对成像质量的影响
同样的道理,行车记录仪需要拍摄相对运动的物体,那么快门时间必须要短。根据我们实测,在白天环境下,各个行车记录仪基本都可以在高速运动时拍摄清楚前车的车牌。但是在晚上光线不足的环境下,即使汽车的相对速度只有20Km/h,暂时也没有一款行车记录仪能拍摄清楚前车的车牌。但是我们相信,随着科技的进步,能够在夜间抓拍车牌的行车记录仪神器在不久之后也会出现。
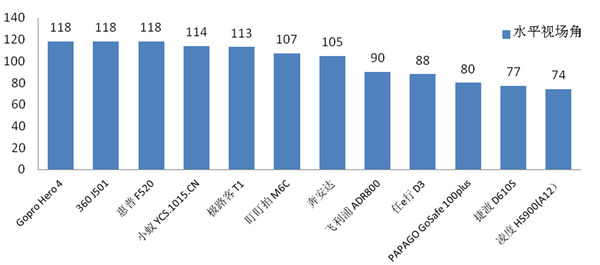
4、视场角:厂家标称的视场角往往不是水平视场角
前面我们提到水平视场角以120°为佳,那么各行车记录仪的视场角表现如何?
很多厂商宣称其视场角时,往往会说采用镜头视场角。但镜头视场角并不等于画面视场角,因为匹配对位及校正校准的原因,Sensor对角线必定会小于镜头的像场,所以画面视场角往往会小于镜头视场角。另外对于广角镜头来说,因为畸变,角落部分挤压了过多的景物,往往无法分辨。所以,我们选用水平视场角来对各个行车记录仪进行评测。
5、清晰度
5.1 MTF 调制解调函数(静态):MTF值达到0.5,说明行车记录仪的镜头分辨率超越Sensor(传感器),则相机像素数越高,成像分辨率越高。
在影像质量测试领域,MTF(调制解调函数)用来测试相机的清晰度,您可以简单的认知为对比度,当黑白对比度低于10%时,人眼基本上就无法分辨。照片中的物体的对比度一般来说会低于实物本身的对比度,物体越细密,也就是专业术语说的空间频率会越高,比如说头发、睫毛等,照片中的对比度会越低。照片的清晰度主要由镜头分辨率和Sensor(传感器)决定。我们选用MTF 值10%作为极限对比度,空间频率用Cycle/pixel单位来表示。若MTF 10%对应的空间频率达到0.5 Cycle/pixel,则可认定镜头分辨率已超越Sensor,则相机像素数越高,成像分辨率越高。但当MTF 10%对应的空间频率低于0.5 Cycle/pixel时,则镜头的分辨率无法满足Sensor,则相机像素高不代表成像分辨率也高。
行车记录仪的水平视场角基本在100度以上,属于广角范畴。我们采用法国DxOAnalyzer的MTF 鱼眼测试模块,对行车记录仪的MTF进行测试,分别测定画面中心,上下左右四边和四个角的MTF。(测试格式均为1080P)

测试结果如上图所示,大部分行车记录仪成像还是比较清晰的,满足FULL HD1080P全高清的要求,但还是有一部分行车记录仪清晰度较差。一般来说,画面中心会比四角的清晰度更高,广角更是如此。
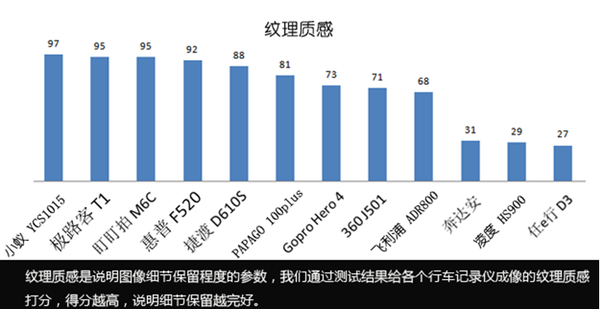
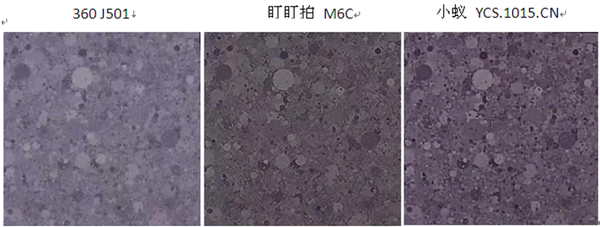
5.2纹理质感: 纹理质感得分越高,细节保留越好
很多行车记录仪为了提高清晰度,均使用了极强的锐化算法,相应的很多细节则保留较少。虽然轮廓清晰,但将人脸皮肤拍摄成胶皮,将树冠拍摄成一团绿,这样的成像缺少细部层次感和质感。
Dead Leaves测试卡是专门测试成像纹理质感的工具,我们用它来对行车记录仪的成像质感保留程度进行测试、打分,结果如下。
以下为盯盯拍和360,小蚁行车记录仪实拍落叶图时视频截图对比,可以看出小蚁相对360有更多明暗细节保留。
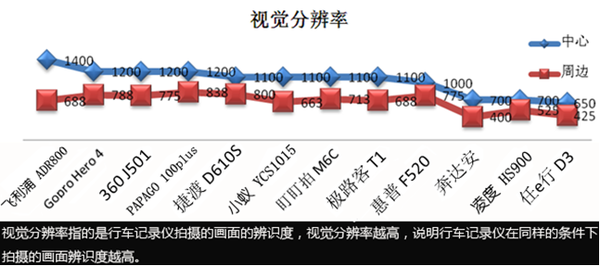
 5.3视觉分辨率:
5.3视觉分辨率:
ISO12233视觉分辨率测试卡主要测试相机能够拍摄到的最细的黑白线对,单位为LW/PH(line Width per Height,线宽每像高)。视觉分辨率越高,就能够看清更细的黑白线对。当然,高清1080P高度方向只有1080线,所以,对于高清视频来说,理论上的最大值是1080LW/PH。
但是由于畸变的原因,相同大小的物体出现在画面不同位置时,在画面中的大小是不一致的,对于广角来说,画面中心往往会比在画面四角大很多,所以,我们会看到画面中心的视觉分辨率会超过1080LW/PH,但相应的四角就会差更多。
行车记录仪一般为超广角,其对焦距离一般设置在2米以外,所以如果要测试视觉分辨率,测试卡一定会非常大。英迈吉影像测评实验室为此特定制了一张等效大小为6米*3.4米的超大测试卡,用于测试其视觉分辨率。以下是各个行车记录仪的成像分辨率的测试结果。
5.4动态清晰拍摄距离:白天大多能在10几米外看清车牌,晚上一旦相对速度超过20m/s没有一款行车记录仪能看清车牌
2.1~2.3清晰度测试均是在静止状态下进行测试,而行车记录仪的主要用途是在行驶过程中记录路况。人眼在快速行驶状态下视力会有所下降,速度越快,下降越多,那么快速移动时行车记录仪是否也有相同的问题呢?
我们分别在白天和晚上以不同速度通过路旁静止的车辆,测量记录各款行车记录仪的动态清晰度表现。
白天 天气:多云 照度: 3万Lux

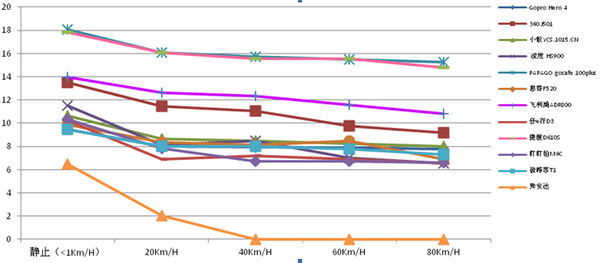
夜晚: 城市道路,路灯开启,照度:19 Lux

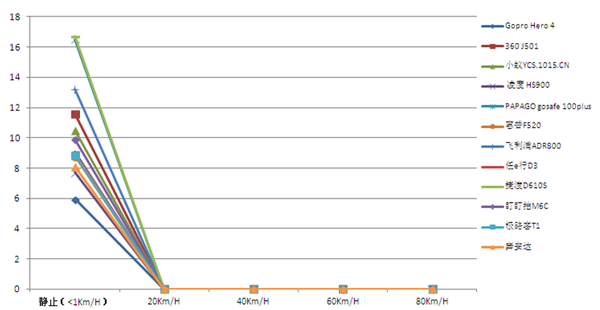
夜晚昏暗环境下,只有在相对近乎静止的状态才能拍清楚车牌。但是如果车辆运动起来,即使相对速度20Km/小时,也因为出现拖影无法辨识字体,所有的行车记录仪都全军覆没,无一例外。所以大家如果想在晚上抓拍非法占用应急车道车辆的车牌,除非你和目标车辆的相对速度接近0,否则肯定会出现拖影无法辨识车牌字体。
6、噪声
这里的噪声不是指我们平时常说的杂乱无章的声音。在图像测试里,噪声是在图像采集转化的过程中,随机加入的非线性的伪信号,如果噪声较大,就会覆盖正常的信号,从而无法正确的还原真实的场景信息。
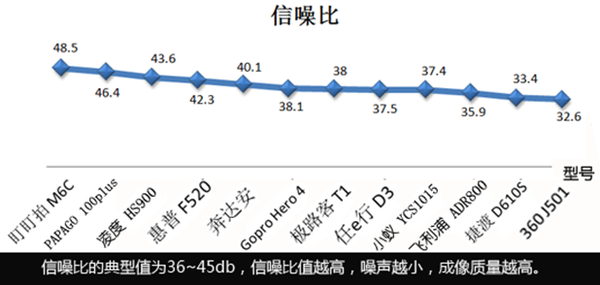
6.1信噪比:信噪比越高,画面会更加干净和稳定
空间噪声我们使用信噪比(S/N)来衡量,信噪比越高,则画面会更加干净和稳定,信噪比(S/N)越低,则画面会看起来很嘈杂,视频中比较明显的就会有局部的闪动,更加极端的话,就是坏点、热点,导致其不会对场景变化做出响应。信噪比的单位为dB, 信噪比的典型值为36~45db,高于45dB,则画面干净,基本察觉不到噪声;若低于36dB,则就有明显可感知的噪声,画面看起来较为嘈杂。
下为各个行车记录仪成像的信噪比测试结果:
6.2动态范围:动态范围越大,能采集到的明暗范围会更宽广,其所能表现的层次越丰富
动态范围是指行车记录仪能记录原稿的色调范围,即从最黑到最亮时,行车记录仪可以分辨的最高亮度与最低亮度的比值。动态范围越大,能采集到的明暗范围会更宽广,其所能表现的层次越丰富。具备高动态范围功能WDR或HDR的行车记录仪,暗部或亮部会有更多细节。下为各行车记录仪的动态范围值:
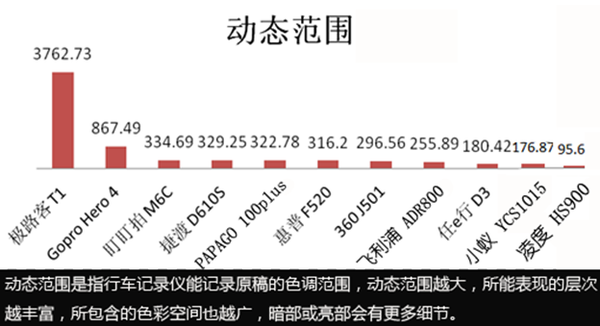
一般来说,若不做特殊处理,动态范围一般在8个Ev,也就是256左右,而加了HDR算法等,则可容纳更多明暗对比。极路客T1很明显已经加入了WDR或HDR,其动态范围值遥遥领先,傲视群雄。
7、漏秒:近三分之二的行车记录仪均有少量漏秒
行车记录仪虽然持续在拍摄,但保存的文件会依一定的时间段切割保存,那么切割的时间点前后是否都有全部记录下来呢?在保存文件时,行车记录仪主芯片负荷会较重,一些低端的行车记录仪会漏掉前后1~2秒钟的路况,这样就很可能没有拍到发生事故的瞬间。从这个角度来说,英迈吉建议大家不要使用会漏秒的行车记录仪。
英迈吉对各款行车记录仪进行了漏秒性能测试,测试结果如下。
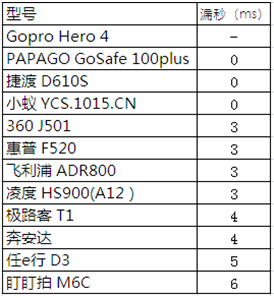
从上面的测试结果中我们可以看到,近三分之二的行车记录仪均有少量漏秒,丢掉了1~2帧的画面,虽然时间极短(请注意时间单位是毫秒),似乎不太影响使用,但这可不是一个什么好的讯号。事故也是一瞬间的事情,还是以不漏秒为好。
8、伪像
8.1畸变
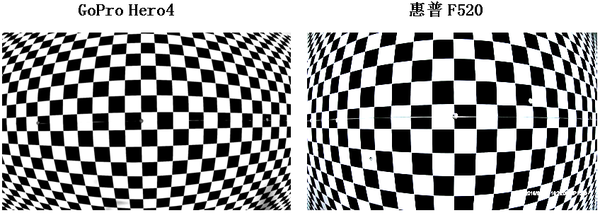
畸变是照片和视频中物体相对实物本身出现的扭曲和变形,可分为桶形畸变和枕形畸变。对于广角来说,一般都是桶形畸变。我们测试行车记录仪的TV Distortion来分析各个行车记录仪的形变量,一般来说,视场角越大,畸变越大。
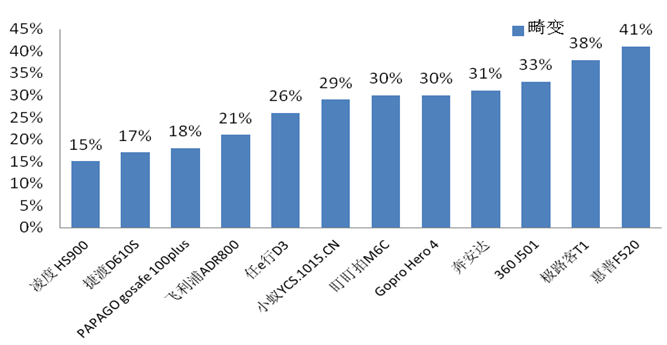
如下图,水平视场角同为118度,但惠普F520的畸变明显比GoPro Hero4大很多,其中心块所占的像素数更多,鼓出的效应也更明显。
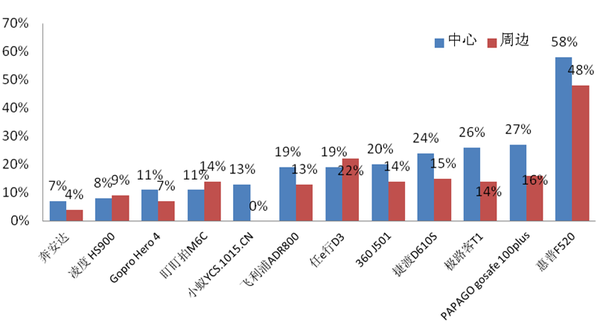
8.2暗角:视频画面四角相对于中心亮度下降的百分比越高,抗暗角能力越差,越多暗角的细节无法看清
使用广角镜头拍出来的照片,往往画面的四角会较中心暗一些,英迈吉通过测试视频画面四角相对于中心亮度下降的百分比来衡量行车记录仪的抗暗角能力。
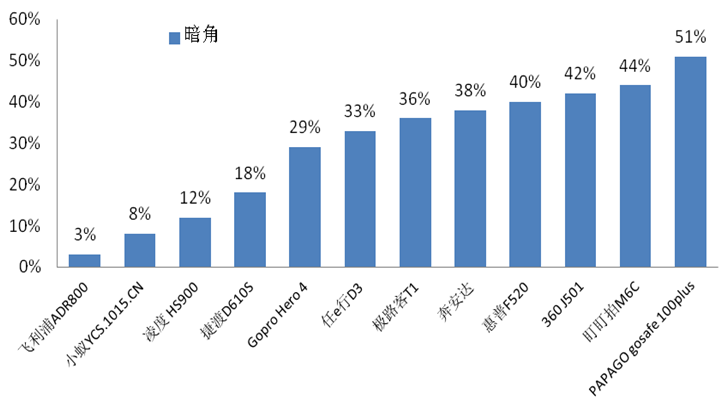
PAPAGO水平视场角虽然只有80度,但其暗角却比水平视场角118°的GoPRO Hero4还要差很多,出现了明显的暗角,如下图:

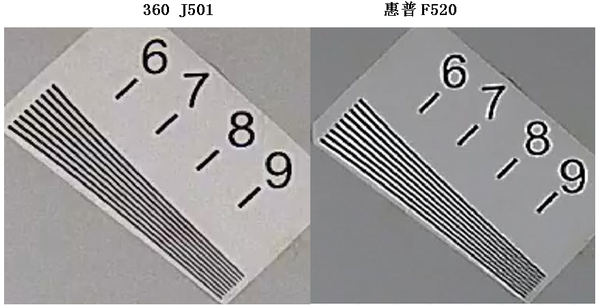
8.3锐化:锐化可以提升清晰度,但同时会造成许多细节丢失
很多厂商会通过锐化来提升清晰度,其原理是在黑白边界由算法人工加入比实物本身更黑和更白的边,相当于重新描了一次边,适度的锐化可提升画面清晰度,而过度的锐化则会掩盖原有的边缘和层次,许多细节反而会丢失。各行车记录仪的锐化程度如何呢?
对比360 J501和惠普F520,明显惠普F520锐化过度,如下图:
=============================我是分割=================================
这个答案竟然被收录为知乎的编辑推荐了,简直让我觉得有点受宠若惊。
其实严格来讲,我不是专业的行车记录仪评测的,我只是一个影像质量评测工程师,只对行车记录仪的成像做评测,而不负责测试其他项目。
行车记录仪的成像质量很重要,但不是全部,其他属性如防晒、死机等性能也是非常重要的,但是我并没有涉及,所以大家不要再问我推荐哪一款行车记录仪了,因为我也说不准。
今天,为了感谢各位的点赞,我就拓展一下谈谈影像质量评测到底是怎么一回事吧,感兴趣的可以看一下,不感兴趣的关了吧。
影像质量到底怎么算好,一直都没有一个定论。有人觉得美颜相机那种把人美化了的效果是好的,有人觉得在黑暗的环境下能像白天一样正常拍摄就是好的……
而在我们影像质量评测领域,一切都是以人眼为标准,人眼看到是什么样,呈现出来的图像就应该是这样。
目前,图像质量评价从方法上可分为主观评价方法和客观评价方法,前者凭借实验人员的主观感知来评价对象的质量;后者依据模型给出的量化指标,模拟人类视觉系统感知机制衡量图像质量。下面,就由我为大家详细讲解一下这两个图像质量评价方法的区别和特点。
一、主观评价
主观质量评分法是图像质量最具代表性的主观评价方法,它通过对观察者的评分归一化来判断图像质量。而主观质量评分法又可以分为绝对评价和相对评价两种类型。
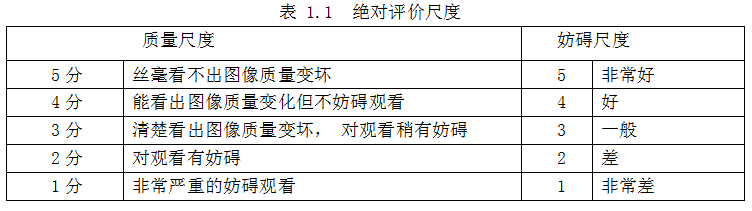
绝对评价是将图像直接按照视觉感受分级评分,表 1.1 列出了国际上规定的 5 级绝对尺度,包括质量尺度和妨碍尺度。对一般人来讲,多采用质量尺度;对专业人员来讲,则多采用妨碍尺度。
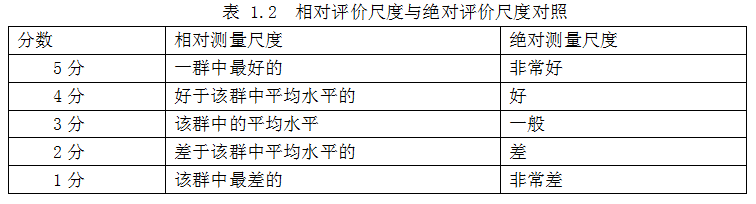
相对评价是由观察者将一批图像从好到坏进行分类,将它们相互比较得出好坏,并给出相应的评分。相对尺度如表 1.2 所示。
图像质量的主观评价方法的优点是能够真实的反映图像的直观质量,评价结果可靠,无技术障碍。但是主观评价方法也有很多缺点,如需要对图像进行多次重复实验,无法应用数学模型对其进行描述,从工程应用的角度看,耗时多、费用高,难以实现实时的质量评价。在实际应用中,主观评价结果还会受观察者的知识背景、观测动机、观测环境等因素的影响。此外,主观质量评价无法应用于所有场合,如需要进行实时图像质量评价的领域。
二、客观评价
图像质量的客观评测是根据人眼的主观视觉系统建立数学模型,并通过具体的公式计算图像的质量。相比主观评测,客观评价具有可批量处理、结果可重现的特点,不会因为人为的原因而出现偏差。
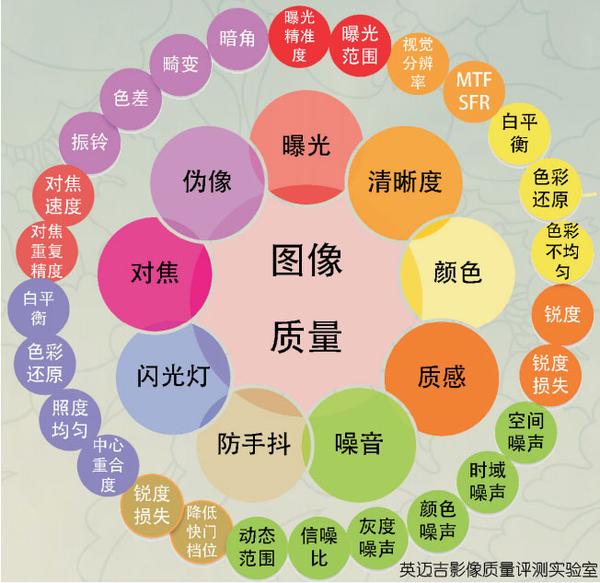
一般来说,图像质量客观评价会分成九个评测项目,曝光、清晰度、颜色、质感、噪音、防手抖、闪光灯、对焦和伪像,每一个评测项目往往还会分成好几个评测小项目,如伪像就要测试锐化、畸变、暗角这些项目。通过测试这些项目,通过科学的计算,可以非常直观地看到图像的性能的各个方面的表现有何不足。
测试这些项目我们通常用到的一个方式是:测试卡+光源+测试仪器+测试软件=测试结果。
测试卡种类非常繁多,每一种测试卡都可以测试一个或多个测试项目,比较出名的就是ISO12233分辨率测试卡,是一张专门测试分辨率的测试卡。
光源也是一个非常重要的。我们都知道,拍照对光的要求是非常高的,巧妇难为无米之炊,摄影师也难为无光摄影。我们实验室通常会配置非常多的光源箱,可以在实验室里模拟各种光照环境。
测试仪器也是多种多样,根据不同的测试项目,研发了特定的测试仪器。如镜头的MTF值,我们有专门的MTF测试仪,通过测试镜头的MTF值,我们就能判断这个镜头模组的质量,从而找到调试方向。除此之外,我们还有闪关灯测试仪、光面距离测试仪、快门时间测试仪等等。
测试软件主要有三个,德国的IE,美国的Imatest和法国的DxO Analyzer,这三个测试系统都是符合国际IEEE标准的,而且在世界上知名度比较高。我们实验室用的是DxO,和那个相机、镜头、手机测评网站dxomark的那个网站用的测试系统是一样的——DxO Analyzer和dxomark都是法国DxO公司的产品。
我们的测试的流程基本就是:在指定的环境下拍照——输入测试系统——系统自动分析得到结果——分析测试结果。
以上就是影像质量测评的一个基本介绍。平时我们也是测一些电子产品,如手机、相机、安防摄像头、行车记录仪等等,这些产品的测试项目不尽相同。我们也会做一些收费测试,帮厂商未上市的产品做测试,比如华为、oppo、vivo等等这些都是我们的客户。之前华为P9就是在我们实验室测的,由于商业秘密原因,测试结果我就不在这里公开了。
- 影像技术—行车记录仪客观评价指标
- 行车记录仪
- 影像质量评价指标汇总
- 影像质量评价指标汇总
- 影像质量评价指标汇总
- 影像质量评价指标汇总
- 影像质量评价指标汇总
- 【英迈吉】基于客观测试数据的影像质量评价方法研究
- 将树莓派变成行车记录仪
- 行车记录仪USB
- android 行车记录仪
- 基于MT6261行车记录仪
- 行车记录仪选购记录
- 做真正实用的行车记录仪——魅航行车记录仪MC6测评
- 行车记录仪 方案 主控芯片
- 行车记录仪静电整改总结
- [技术讨论]建模工具的使用到客观评价
- 客观的评价西北工业大学
- oracle 根据出生年份计算生肖
- socket解决:Address already in use报错问题
- nginx搭建和配置
- 练习1-9 编写一个将输入复制到输出的程序,并将其中多个连续的空格用一个空格代替。
- 定时器标签
- 影像技术—行车记录仪客观评价指标
- android-opencv-下载地址
- 【腾讯TMQ】iOS静态代码扫描之工具调研
- 将数据集做成VOC2007格式用于Faster-RCNN训练
- 《gradle 用户指南》中文版 第2章 概述
- 《图解HTTP[上野宣]》读书笔记六-2
- 卷积层
- ConnectionResetError: [WinError 10054] 、argument must be str、[Decode error
- android 6.0


